1.本发明的主题是腹腔镜夹持机,其适于将不同尺寸的夹具-手术夹钳应用在组织结构上。
背景技术:
2.在手术实践中,使用内窥镜手术夹持机,其中用于夹子应用的末端操纵装置是一个可以打开和闭合的活动钳口。用于将夹子应用在组织结构上的现有技术夹持机包括两个主要元件:
3.手柄,配有活动触发杆和内窥镜部分-杆体,杆体通常呈管状,末端为一对活动钳口形式的操纵装置。活动钳口安装在杆体的末端,钳口的移动触发机构包括至少一个推动器或腱,通常轴向定位在杆体内,由触发机构移动。触发机构通常包括触发杆,推动器通过触发杆移动并且钳口闭合。位于手柄中的弹簧使触发杆返回其初始位置并且钳口打开。使钳口在两个位置(初始打开位置和闭合位置)之间移动的机构不允许夹钳的尺寸随着钳口在固定的打开范围内移动而变大或变小,这意味着特定的夹持机只适用于一种夹钳。因此,在需要不同尺寸的夹钳的外科手术情况下,需要几台夹持机而不是一台夹持机。
4.根据发明ep3560442a1的描述,已知一种腹腔镜夹持机,它具有杆体、手柄、触发杆和机构,该机构通过位于夹持机杆体中的推动器将触发杆的运动传递到钳口,其中将钳口连接到触发杆,从而在钳口被夹紧时,推动推动器。所公开的夹持机的钳口设有夹子,夹钳插入夹子之间,通过将触发杆夹紧抵靠手柄来夹紧夹钳,其中夹持机设有一杆机构,用于移动所述腱。
5.由于在单个外科手术过程中经常需要使用不同尺寸的夹钳,因此需要能够应用不同尺寸的夹钳的夹子机。由于在手术过程中可能需要用到许多不同的专用腹腔镜器械,因此人们期望新的腹腔镜器械应该简单、使用直观且符合人体工程学。
6.由于手术过程中需要多种动作,包括需要不同尺寸的夹钳,因此要求可以在不更换仪器的情况下改变初始钳口张开度,并且无论夹钳的尺寸如何,夹持机的性能都是重复的。
技术实现要素:
7.本发明的目的是一种具有简单设计的腹腔镜夹持机,它能够快速更换夹钳的初始间距,因此能够改变夹子的初始间距,使夹持机适于容纳不同尺寸的夹钳,从而缩短手术过程的持续时间。
8.本发明的主题是用于将外科手术夹钳应用于组织结构的腹腔镜夹持机,包括手柄、集成到手柄中的杆体、安装在杆体端部的钳口、相对于手柄可枢转地安装的触发杆、在触发杆和钳口之间提供可移动连接的腱组件,其中所述腱组件沿杆体的纵向轴线延伸,其中对于触发杆的初始位置,钳口处于初始打开位置。一种夹持机,其特征在于,设有改变触发杆初始位置的机构,该机构包括可调节的第一止动元件和第二止动元件,其中触发杆设
有第三止动元件,当钳口处于初始位置时,第三止动元件与第一止动元件或第二止动元件接触。
9.所述夹持机的特征在于,用于改变触发杆初始位置的机构包括触发杆初始位置改变旋钮,所述触发杆初始位置改变旋钮设有包括第一止动元件的第一止动面和包括第二止动元件的第二止动面。
10.所述第一止动面和第二止动面可以垂直于杆体的纵向轴线定位。
11.所述夹持机的特征在于,触发杆初始位置改变旋钮为环形,其内圆柱面位于与手柄一体的本体上。
12.触发杆初始位置改变机构可以设置有闩锁以锁定触发杆初始位置改变旋钮的位置。
13.闩锁可以是球扣的形式,其中触发杆初始位置改变旋钮可以具有凹槽,用于在内圆柱面上形成的闩锁。
14.触发杆初始位置改变旋钮可以设置一个指示器,来指示选定的初始钳口间距。
15.所述夹持机的特征在于,所述第三止动元件为圆柱形止动面。
16.所述第三止动元件可以是位于所述触发杆上的止动销或螺纹元件。
17.所述夹持机的特征在于,所述触发杆的旋转接头与所述第三止动元件位于所述杆体纵向轴线的相对两侧。
18.所述夹持机的特征在于,所述触发杆设有位于触发杆旋转接头与所述第三止动元件之间的拉动接头销,所述拉动接头与所述腱组件连接。
19.根据本发明的腹腔镜夹持机的一个优点是,所提供的用于改变钳口初始间距的旋钮除了其主要功能外,还用作钳口间距选择的指示器,此外,还可以进行听觉和触觉识别间距选择动作的执行。因此,操作者可以在视觉、听觉和触觉上控制钳口间距的变化。
20.一个简单的旋钮用于改变钳口的间距,这是一个非常符合人体工程学的解决方案。操作者有一个旋钮来改变钳口的角度位置,紧挨着它的还有一个旋钮,通过与钳口连接的方式来改变触发杆的初始位置,所述旋钮用于改变钳口的初始间距。机构的简单性确保了旋钮的直观调节,预期旋钮位置的识别是显而易见的。这种简单性保证了工具的恒定精度和耐用性。
附图说明
21.参照附图所示的实施例更详细地描述本发明的目的,其中:
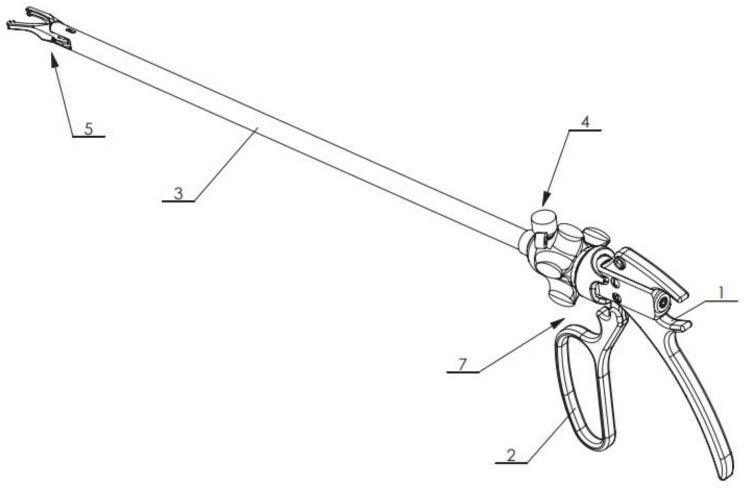
22.图1示出了腹腔镜夹持机的立体图,
23.图2a、3a示出了在较小夹钳的初始位置具有机构的夹持机,
24.图2b、3b示出了在较大夹钳的初始位置具有机构的夹持机,以及
25.图4示出了触发杆已拧紧后到位的夹持机。
具体实施方式
26.腹腔镜夹持机包括手柄1、触发杆2、杆体3、钳口角度位置改变机构4、钳口5和腱组件6。夹持机设有改变触发杆的2初始位置的机构7。触发杆2可旋转地安装在布置在手柄1中的触发杆2的旋转接头8上(图2a)。钳口5可枢转地安装在杆体3远端的接头9上,其中钳口5
通过腱组件6移动(图2a、2b)。
27.腱组件6包括在钳口5一侧的远侧末端10、腱11和在手柄1一侧的近侧末端12。腱组件6设计成沿着杆体3的纵向轴线k移动,纵向轴线k可以是杆体3和腱11两者的几何轴。
28.远侧末端10通过螺纹连接到腱11。近侧末端12也通过螺纹连接到腱11。腱组件6可移动地将钳口5连接到触发杆2,其中触发机构15包括触发杆2、滑块16、弹簧23和腱组件6。腱组件6的近端12设有头部13,头部13通过滑块16通过触发杆2移动,触发杆2向手柄1的旋转使钳口5夹紧。钳口5设置有夹子5a和5b,夹头插入夹子5a和5b内。钳口5设置有开口5c和5d,附接到另一端10的螺栓14在开口5c和5d中移动,螺栓14的移动导致钳口5旋转。
29.触发机构15的滑块16在主体18的开口17中移动,主体18与手柄1牢固连接并形成手柄1的一体部分。滑块16设有第一开口19,第一开口19具有与杆体3的纵轴k垂直的轴。在开口19内放置有头部13,其中开口19在腱组件6的一侧打开。头部13与开口19一起形成腱11的近端12的接头20。此外,在滑块16的内部设有第二开口21,触发杆2的销2a位于该第二开口21中,其中销2a可以具有圆柱形状,其轴线m垂直于杆体的纵向轴线k,第二开口21可以具有矩形横截面。第二开口21与销2a一起形成拉动接头22。牵引接头22的任何其他形状都是可能的。枢转安装的触发杆2通过拉动接头22的运动迫使滑块16和腱组件6根据纵向轴线k进行线性运动。触发机构15设置有弹簧23,该弹簧是压缩弹簧并且安装在主体18中,从而它迫使滑块16在朝向钳口5的方向上运动。触发杆2上的手动压力使滑块16运动和弹簧23压缩,压力的释放使触发杆2在弹簧23的作用下返回其初始位置。
30.触发杆2的初始位置改变机构7与腱组件6一起构成钳口5的初始间距改变机构25。钳口5的初始间距,即夹子5a和5b之间的距离,直接与触发杆2初始位置的改变有关。触发杆2的初始位置改变机构7设有触发杆2的初始位置改变旋钮26,即同时是钳口5的初始间距改变旋钮。触发杆2的初始位置改变旋钮26呈环形,具有可旋转地安装在手柄1的主体18的圆柱面18a上的内圆柱面26k。触发杆2的初始位置改变旋钮26可以设置有第一止动元件和第二止动元件,第一止动元件和第二止动元件是可调节的,以支撑触发杆,即确定触发杆2的初始位置。触发杆2的初始位置改变旋钮26的止动元件可以呈任何形式,例如它们可以是止动螺栓。位于触发杆2上的第三止动元件可以呈任何形式。在所示的触发杆2的初始位置改变旋钮26的实施例中,第一止动元件26a具有止动面26a的形式并且第二止动元件26b具有第二止动面26b的形式(如图3a和3b)所示,而第三止动面2b具有凸面的形式,其中凸面朝向钳口5。第三止动面2b可以是圆柱面的形式,第三止动面2b可以是杆体3侧的触发杆2上的任何突起的形式。例如,可以使用压入触发杆2的止动螺栓或拧入触发杆2的元件。在触发杆2的初始位置,触发杆2上的第三止动面2b可在弹簧23的作用下压靠在触发杆2的初始位置改变旋钮26上的第一止动面26a或第二止动面26b上。在所示的实施例中,触发杆2靠在第一止动面26a上的支撑适于打开钳口5以设置为适合于l尺寸的夹钳的开口(图2a和3a)。触发杆2靠在第二止动面26b上的支撑确保触发杆2的最大枢转并且适于打开钳口5以设置为适合尺寸xl夹钳的开口(图2b和3b)。第一止动面26a和第二止动面26b之间沿着平行与纵向轴线k的方向在图3a中如d所示的距离使得能够获得触发杆2的两个不同初始位置,其中通过旋转旋钮26来重新定位止动面26a和26b。此外,触发杆2的初始位置改变旋钮26具有连接第一止动面26a和第二止动面26b的中间表面26c,这提供了这些表面之间的平滑过渡。旋钮26设置有指示器26l,指示器26l指示钳口5的可能间距之一,即间距l或xl,如图3a和3b所示,当旋
钮26被锁定时,指示器26l可以设置在手柄1上的描述l或xl之一的前面。指示器26l呈圆形指状,靠近主体18的圆柱形表面18a。触发杆2的初始位置改变旋钮26的轴向位置通过法兰26g固定,该法兰26g靠在手柄1的凹槽1a上,且通过螺母27沿着杆体3的纵向轴线k布置。触发杆2的初始位置改变机构7设置有闩锁28,该闩锁28具有闩锁元件29,闩锁元件29呈球形,其布置为锁住旋钮26。对于间距l,闩锁元件29滑入凹部26e中,并且对于间距xl,闩锁元件29滑入凹部26f中。
31.触发机构15设计成使得杆2紧靠手柄1的紧固产生腱组件6在朝向手柄1的方向上的运动。触发杆2的旋转接头8和触发杆2的第三止动面2b位于杆体3的纵向轴线k的相对侧和拉动接头22的相对侧。此外,触发杆2的握持部2g和触发杆2的旋转接头8类似地位于杆体3的纵向轴线k和拉动接头22的相对侧。
32.夹持机设有钳口5的角度位置改变机构4,其包括钳口5的套筒31和角度位置改变旋钮32。杆体3与套筒31固定连接,套筒31保持与轴承33的内轨道接触且随着轴承33的内轨道旋转。钳口5的角度位置改变旋钮32的旋转引起杆体3和固定在杆体3上的钳口5的旋转。
33.如图2a和2b以及图3a和3b所示,触发杆2和钳口5位于它们的初始位置,其中在图2a中,触发杆2上的第三止动面2b靠在旋钮26上的第一止动面26a上和钳口5的间距适用于尺寸l的夹钳,旋钮26的指示器26l指示选择的尺寸l(图3a),而在图2b中,旋钮26被旋转以使指示器26l显示所选尺寸xl(图3b),触发杆2的第三止动面2b靠在旋钮26上的第二止动面26b上,钳口5的间距适合xl尺寸的夹钳。
34.图4示出了当夹钳被夹住时,夹持机处于这样的位置,触发杆2相对于手柄1被最大程度地拧紧。
35.通过握住手柄1和触发杆2来改变钳口5的间距,其中触发杆2和手柄1必须稍微拧紧,以使触发杆2朝向手柄1旋转,这将导致钳口5闭合。然后,有必要用另一只手或拇指转动触发杆2的初始位置改变旋钮26,改变钳口5的初始间距,使其处于与所用l或xl夹钳的尺寸相符的位置,即26l指示器设置在主体18上的l或xl描述之一的前面。通过闩锁28可听见地锁定在凹部26e或26f之一中来实现旋钮26设置在其中一个可能的位置,其中用手可感觉到闩锁的锁定,因为锁定会引起手柄和旋钮的小幅振动。因此,根据本发明的夹持机的操作者具有三重确认,即已对夹持机的钳口的初始打开设置进行了改变。
36.钳口5的角度位置改变机构4独立于钳口5的初始间距改变机构25。钳口5的角度位置改变机构4可以设置有闩锁元件。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
