1.本发明涉及滴液装置以及方法,具体涉及一种智能辅助滴液装置以及方法。
背景技术:
2.在医院或诊所中,打点滴往往是最常见的情况,而打点滴的时候医生往往会将吊瓶挂在一个支架上。但是当患者想站起来活动或者有上厕所等需求的时候,就需要人将吊瓶举高并跟随患者移动,而当只有患者自己一个人时,就需要患者用空闲的手将吊瓶举高,这造成了极大的不便利;尽管现在有些支架是带有滚轮能够推动的,但是这也是需要患者或其他人主动去推,而且在移动时,输液的手并不是固定的,会有滚针的风险。
技术实现要素:
3.本发明的目的在于克服上述存在的问题,提供一种智能辅助滴液装置,该智能辅助滴液装置能够自动跟随患者,并在移动过程中维持输液手的稳定性,进而避免滚针的风险。
4.本发明的目的在于克服上述存在的问题,提供一种智能辅助滴液方法。
5.本发明的目的通过以下技术方案实现:
6.一种智能辅助滴液装置,包括滴液支撑机构、自动行走机构和辅助控制模块;
7.所述滴液支撑机构包括支撑杆和承托臂,所述支撑杆设置在自动行走机构上;所述承托臂通过姿态调节机构设置在支撑杆上,该承托臂上设有用于感应是否放置有患者的手臂的感应传感器;所述感应传感器与辅助控制模块电连接;
8.所述辅助控制模块设置在自动行走机构上,且与自动行走机构电连接,该辅助控制模块包括视觉识别模块和数据处理模块。
9.本发明的一个优选方案,其中,所述承托臂上设有内凹的放置槽,以便对患者的手臂进行适当的防护。
10.本发明的一个优选方案,其中,所述姿态调节机构包括升降驱动机构,所述承托臂设置在升降驱动机构上;所述承托臂上设有用于控制升降驱动机构工作的调节按钮。
11.进一步,所述姿态调节机构还包括锁定机构;所述承托臂上设有用于控制锁定机构工作的锁定按钮。
12.本发明的一个优选方案,其中,所述支撑杆的顶部设有挂钩,可用于吊挂吊瓶,这样能够保证吊瓶的稳定性。
13.本发明的一个优选方案,其中,所述智能辅助滴液装置上设有用于供移动通信终端进行识别的身份识别模块。
14.一种智能辅助滴液方法,包括以下步骤:
15.在坐下的状态下,患者将手臂放在承托臂上,通过姿态调节机构调节承托臂的姿态,获得舒适的摆放姿态;
16.承托臂上的感应传感器检测到承托臂上放置有患者的手臂后,向辅助控制模块发
送工作的信号;
17.视觉识别模块获取到患者的脚部的图像作为roi区域,将此roi区域作为识别的依据;
18.当患者需要站立走动时,通过姿态调节机构再次调节承托臂的姿态,获得站立时舒适的摆放姿态;
19.当视觉识别模块识别到患者的脚部开始运动时,数据处理模块向自动行走机构发送自动跟随的信号,开启跟随模式;在跟随模式下,与患者的脚步保持设定的距离,并沿着平行于脚部移动的切线方向运动;
20.当患者需要坐下休息时,先将手臂抬离承托臂,承托臂上的感应传感器检测到患者的手臂离开承托臂后,向辅助控制模块发送停止跟随的信号;辅助控制模块将停止跟随的信号发送至自动行走机构中,自动行走机构待命;患者重新将手臂放到承托臂上,并随着坐下的过程,调整姿态调节机构到合适位置。
21.本发明的一个优选方案,其中,在将承托臂调节至舒适的姿态后,通过操作锁定按钮,使承托臂锁定在当前位置;
22.当需要调节承托臂时,再次操作锁定按钮,解除锁定,即可驱动承托臂。
23.本发明的一个优选方案,其中,在启用智能辅助滴液装置之前,通过移动通信终端识别智能辅助滴液装置的身份识别模块,并实进行连接;
24.当视觉识别模块获取到患者的脚部的图像后,将该脚部的图像上传到移动通信终端,待患者查看以及确认。
25.本发明的一个优选方案,其中,进入跟随模式后,自动行走机构离开充电装置。
26.本发明的一个优选方案,其中,当视觉识别模块识别到患者的脚部停止运动时,视觉识别模块向自动行走机构发送停止移动的信号,等待患者的下一步操作。
27.本发明的一个优选方案,其中,当患者回到座椅前,且自动行走机构检测到充电装置时,在收到停止跟随的信号后,自动行走机构调整自身朝向并自动移动到充电装置上。
28.本发明与现有技术相比具有以下有益效果:
29.1、本发明能够为打点滴的患者提供移动的便利性,可以在不用手推的情况下自动移动并跟随患者。
30.2、通过设置承托臂和感应传感器,在移动过程中维持输液手的稳定性,进而避免滚针的风险。
附图说明
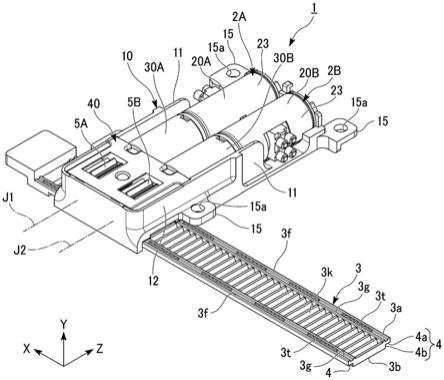
31.图1为本发明中的智能辅助滴液装置的立体结构示意图。
32.图2为本发明中的智能辅助滴液装置的侧视图。
具体实施方式
33.为了使本领域的技术人员很好地理解本发明的技术方案,下面结合实施例和附图对本发明作进一步描述,但本发明的实施方式不仅限于此。
34.参见图1-2,本实施例中的智能辅助滴液装置,包括滴液支撑机构、自动行走机构1(agv,装有麦克纳姆轮)和辅助控制模块;所述滴液支撑机构包括支撑杆2和承托臂3,所述
支撑杆2设置在自动行走机构1上;所述支撑杆2的顶部设有挂钩4,可用于吊挂吊瓶,这样能够保证吊瓶的稳定性。
35.所述承托臂3通过姿态调节机构设置在支撑杆2上,该承托臂3上设有用于感应是否放置有患者的手臂的感应传感器(例如红外传感器);所述感应传感器与辅助控制模块电连接。
36.所述辅助控制模块设置在自动行走机构1上,且与自动行走机构1电连接,该辅助控制模块包括视觉识别模块和数据处理模块;其中,所述视觉识别模块为摄像头,所述数据处理模块为处理器,其他结构可参考现有的智能设备。
37.所述智能辅助滴液装置上设有用于供移动通信终端(例如手机)进行识别的身份识别模块,该身份识别模块可以为二维码等。
38.参见图1,所述承托臂3上设有内凹的放置槽,以便对患者的手臂进行适当的防护。
39.具体地,所述姿态调节机构包括升降驱动机构(图中未显示),所述承托臂3设置在升降驱动机构上;所述承托臂3上设有用于控制升降驱动机构工作的调节按钮。具体地,所述升降驱动机构可采用电机驱动机构等其他能够实现直线驱动的机构。
40.进一步,所述姿态调节机构还包括锁定机构(图中未显示);所述承托臂3上设有用于控制锁定机构工作的锁定按钮。具体地,所述锁定机构可以采用电磁锁进行锁止。
41.参见图1-2,本实施例中的智能辅助滴液方法,包括以下步骤:
42.在启用智能辅助滴液装置之前,通过移动通信终端识别智能辅助滴液装置的身份识别模块,并实进行连接。
43.在坐下的状态下,患者将手臂放在承托臂3上,通过姿态调节机构调节承托臂3的姿态,获得舒适的摆放姿态;通过操作锁定按钮,使承托臂3锁定在当前位置。
44.承托臂3上的感应传感器检测到承托臂3上放置有患者的手臂后,向辅助控制模块发送工作的信号。
45.视觉识别模块获取到患者的脚部的图像作为roi区域,将此roi区域作为识别的依据;并上传到手机端,如果患者在手机端查看后确认是自己的脚部图像则点击确认,后续agv会将此roi区域作为识别的依据。
46.当患者需要站立走动时,先操作锁定按钮,解除锁定,即可驱动承托臂3;通过姿态调节机构再次调节承托臂3的姿态,获得站立时舒适的摆放姿态。
47.当视觉识别模块识别到患者的脚部开始运动时,数据处理模块向自动行走机构1发送自动跟随的信号,开启跟随模式自动行走机构1离开充电装置;在跟随模式下,与患者的脚步保持设定的距离,并沿着平行于脚部移动的切线方向运动。
48.当视觉识别模块识别到患者的脚部停止运动时,视觉识别模块向自动行走机构1发送停止移动的信号,等待患者的下一步操作。
49.当患者需要坐下休息时,回到座椅前,自动行走机构1检测到充电装置时;先将手臂抬离承托臂3,承托臂3上的感应传感器检测到患者的手臂离开承托臂3后,向辅助控制模块发送停止跟随的信号;辅助控制模块将停止跟随的信号发送至自动行走机构1中,自动行走机构1调整自身朝向并自动移动到充电装置上待命;患者重新将手臂放到承托臂3上,并随着坐下的过程,调整姿态调节机构到合适位置。
50.上述为本发明较佳的实施方式,但本发明的实施方式并不受上述内容的限制,其
他的任何未背离本发明的精神实质与原理下所做的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。