1.本发明属于桥梁施工技术领域,特别涉及一种用于钢桁梁主动调节的步履式顶推装置及方法。
背景技术:
2.顶推施工技术从1959年的ager桥成功应用以来,因其具有安全、优质、快速、经济、不需支架、无干扰和场地少等突出的优点,经过无数桥梁建设者的努力改进与完善,在各种桥型中得到广泛应用,已成为世界桥梁史上的一项重要而又经典的施工技术。目前运用于顶推法施工的设备主要有两种类型,一类是用钢绞线拖曳式, 另一类是采用液压油缸进行顶升平推式。
3.随着中国经济的高速发展,国内桥梁、建筑施工快速发展,在桥梁结构施工领域,桥梁施工受限因素越来越多,钢桥顶推方案越来越多的被采用。由于规划和空间利用的需要,大跨度双层钢桁梁桥应用越来越多,在大跨径双层钢桁梁施工时,大多采用顶推施工方案。由于大跨径钢桁梁自重大的特点,最理想的受力情况为节点受力,然而传统的钢桁梁顶推大多采用拖拉法或者步履千斤顶 固定滑块来实现,此种方法对于在同一纵坡上或者竖曲线半径很大较为适用。对于在跨中有较多竖曲线设计的双层钢梁桥来说,需要顶推竖向高程调整量大,现有顶推作业方式不适用。
4.在授权公开号为cn201574358u,名称为“步履式平移顶推装置”的实用新型专利中, 通过在底座上设置顶升支撑油缸,在底座或平移顶推支撑平台上设有用于平移顶推支撑平台纵向移动的顶推装置和用于平移顶推支撑平台横向移动的顶推装置实现箱梁顶升、顺桥方向移动,同时还可以实现横桥方向的调整,以适应不同桥型不同方向的线型和坡度要求。但是仍存在以下不足:顶推装置的控制系统复杂,调整顶推方向时,必须中断顶推作业,顶推过程为间歇式,效率较低。授权公告号为 cn201574358u,授权公告日为2010年9月8日,名称为“步履式平移顶推装置”的中国实用新型专利公开的顶推装置,是在法国米约大桥楔进式顶推施工工艺基础上研制的一套集顶升、平移、横向调整于一体的步履式多点连续顶推设备, 来实现箱梁的顺桥向、竖向、横桥向的移动或调整。该套设备包括顶升油缸、下支撑架、滑移系统、上支撑架、水平顶推油缸、横向调整油缸。这种步履式多点顶推装置利用“顶”、“推”两个步骤交替进行,先将箱梁顶托起,再向前推送;然后顶升油缸回油,将箱梁置于桥墩临时结构上;最后顶推油缸回油,继续实现下一个循环。通过顶推步骤的循环,最终将箱梁顶推到预定的位置。该顶推装置较好地实现了桥梁顶推技术, 由于顶推力和摩擦力全部是顶推设备内力,能够较好地控制临时墩(或结构墩 )的水平力;顶推装置自带竖向千斤顶,可以较好地适应箱梁竖向线形的变化,支点反力可以随时调节,保证各支点的受力均匀;可满足箱梁结构的局部受力要求,不需要另外加强。但该顶推装置的竖向、纵向千斤顶同步性要求高;对液压及电气同步控制系统的精度和性能要求也高;该顶推装置的液压及电气同步控制设备系统较为复杂,系统也较庞大,运输不方便,并且价格昂贵,施工成本较高。
技术实现要素:
5.针对上述问题,本发明的目的是提供一种用于钢桁梁主动调节的步履式顶推装置及方法,该装置结构受力清晰,竖向力分配合理,可以满足在节点顶推的同时降低节点受力,在顶推过程中能自适应调整标高,降低了墩顶水平力、减少大临结构的投入,尤其适应于有竖曲线钢桁梁的顶推施工,有利于降低施工安全风险、加快施工进度。
6.本发明的技术方案在于:一种用于钢桁梁主动调节的步履式顶推装置,包括控制器、轨道梁,所述轨道梁顶部设有滑道,所述轨道梁两端分别设有三向步履式千斤顶,两个所述三向步履式千斤顶之间的滑道上还设有集成滑块,所述三向步履式千斤顶、集成滑块分别与所述控制器通过无线连接,所述三向步履式千斤顶、集成滑块顶部用于放置待顶推的钢桁梁,通过所述控制器控制所述三向步履式千斤顶向前顶推,实现钢桁梁在所述集成滑块上沿所述滑道向前移动。
7.所述轨道梁为箱型或者工字型钢结构。
8.所述滑道材料为不锈钢板,所述滑道与所述集成滑块的摩擦系数<0.08,所述三向步履式千斤顶与所述钢桁梁下弦杆的摩擦力>0.3。
9.所述三向步履式千斤顶采用模块化设计,包括垂向千斤顶、水平千斤顶、纠偏千斤顶、千斤顶控制单元,所述垂向千斤顶设置有垂向千斤顶压力传感器、垂向千斤顶溢流阀、垂向千斤顶位移传感器,所述千斤顶控制单元通过所述垂向千斤顶压力传感器监测垂向千斤顶的液压油腔压力,并通过所述垂向千斤顶溢流阀进行压力调节,所述千斤顶控制单元通过所述垂向千斤顶位移传感器检测垂向千斤顶的伸缩端位移,所述水平千斤顶设置有水平千斤顶压力传感器、水平千斤顶溢流阀、水平千斤顶位移传感器,所述千斤顶控制单元通过所述水平千斤顶压力传感器监测水平千斤顶的液压油腔压力,并通过所述水平千斤顶溢流阀进行压力调节,所述千斤顶控制单元通过所述水平千斤顶位移传感器检测水平千斤顶的伸缩端位移,所述纠偏千斤顶设置有纠偏千斤顶压力传感器、纠偏千斤顶溢流阀、纠偏千斤顶位移传感器,所述千斤顶控制单元通过所述纠偏千斤顶压力传感器监测纠偏千斤顶的液压油腔压力,并通过所述纠偏千斤顶溢流阀进行压力调节,所述千斤顶控制单元通过所述纠偏千斤顶位移传感器检测纠偏千斤顶的伸缩端位移,所述千斤顶控制单元设有wi-fi模块,所述三向步履式千斤顶通过wi-fi模块与所述控制器无线连接。
10.所述集成滑块包括集成滑块底座、竖向千斤顶、垫块,所述竖向千斤顶安装在所述集成滑块底座上部,所述垫块安装在所述竖向千斤顶顶部,所述垫块上表面设有橡胶垫,所述集成滑块底座下部设有四氟板。
11.所述竖向千斤顶设置有竖向千斤顶控制单元、竖向千斤顶压力传感器、竖向千斤顶溢流阀、竖向千斤顶位移传感器,所述竖向千斤顶控制单元通过所述竖向千斤顶压力传感器监测竖向千斤顶的液压油腔压力,并通过所述竖向千斤顶溢流阀进行压力调节,所述竖向千斤顶控制单元通过所述竖向千斤顶位移传感器检测竖向千斤顶的伸缩端位移,所述竖向千斤顶控制单元设有竖向千斤顶wi-fi模块,所述竖向千斤顶通过竖向千斤顶wi-fi模块与所述控制器无线连接。
12.一种用于钢桁梁主动调节的顶推方法,使用任一如上所述的一种用于钢桁梁主动调节的步履式顶推装置,包括如下步骤:s1:临时墩及墩旁支架的施工,临时墩采用钻孔灌注桩基础,墩旁支架利用永久结
构承台墩身作为支撑结构,在墩旁支架上设置轨道梁;s2:轨道梁安装完成后,在拼装支架上进行钢桁梁拼装,拼装一定数量的节段后准备向前顶推,将三向步履式千斤顶支撑在钢桁梁节点位置附近,在控制器的控制下,三向步履式千斤顶的垂向千斤顶启动,顶起钢桁梁,将集成滑块移动支撑在钢桁梁节点正下方位置;s3:集成滑块的竖向千斤顶启动,此时,三向步履式千斤顶与钢桁梁接触的静摩擦力大于集成滑块与滑道接触的最大静摩擦力,三向步履式千斤顶的水平千斤顶启动,顶推钢桁梁向前运动,三向步履式千斤顶的水平千斤顶在顶推伸长到最大位置后关闭,集成滑块的竖向千斤顶启动顶推使三向步履式千斤顶与钢桁梁接触面分开,三向步履式千斤顶的水平千斤顶收回,准备下一次顶推作业,重复上述过程实现三向步履式千斤顶与集成滑块交替顶推,集成滑块逐步由上一个节点移至下个节点;s4:一个节间顶推到位后,在控制器的控制下,三向步履式千斤顶将钢桁梁顶起,利用卷扬机将集成滑块回程移动至下一个节点位置,准备下一行程顶推作业,循环作业直至钢桁梁顶推到位。
13.所述步骤s3中,集成滑块的竖向千斤顶,在控制器的控制下,动态调整由钢桁梁纵坡竖曲线导致的竖向力及位移剧烈变化,使得支撑点的受力和设计值保持一致。
14.本发明的技术效果在于:1.本发明通过在两个三向步履式千斤顶之间的滑道上设置集成滑块,可以满足在节点顶推的同时降低节点受力,在顶推过程中能自适应调整标高,有利于降低施工安全风险、加快施工进度;2.本发明选用三向步履式千斤顶与钢桁梁、集成滑块与滑道接触面材料不同,确保三向步履式千斤顶与钢桁梁下弦杆的摩擦力大于集成滑块与滑道的摩擦力,通过三向步履式千斤顶的纵向千斤顶向前顶推,实现钢桁梁在集成滑块上向前移动,简单方便;3.本发明集成滑块设有竖向千斤顶,实现集成滑块在顶推过程中能主动调整竖向反力及竖向位移值,对于有竖曲线的钢桁梁提供一种顶推施工过程中精准的反力及竖向高程控制。
15.以下将结合附图进行进一步的说明。
附图说明
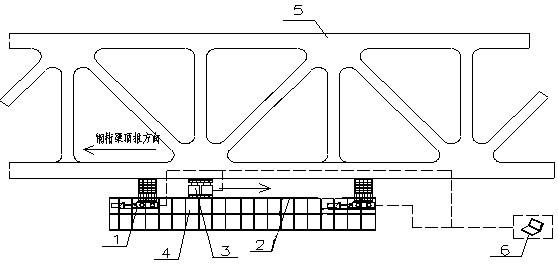
16.图1为本发明实施例一种用于钢桁梁主动调节的步履式顶推装置的结构示意图。
17.图2为本发明实施例一种用于钢桁梁主动调节的步履式顶推装置的集成滑块结构示意图。
18.图3为本发明实施例一种用于钢桁梁主动调节的步履式顶推装置的集成滑块同步移动示意图。
19.图4为本发明实施例一种用于钢桁梁主动调节的步履式顶推装置的集成滑块回程移动示意图。
20.图5为本发明实施例一种用于钢桁梁主动调节的步履式顶推装置的竖向千斤顶控制流程图。
21.图6为本发明实施例一种用于钢桁梁主动调节的步履式顶推装置的三向步履式千斤顶控制流程图。
22.附图标记:1、三向步履式千斤顶;2、滑道;3、集成滑块;4、轨道梁;5、钢桁梁; 6、控
制器;7、竖向千斤顶;8、集成滑块底座;9-垫块;10-橡胶垫;11-四氟板。
具体实施方式
23.实施例1如图1所示,一种用于钢桁梁主动调节的步履式顶推装置,包括控制器6、轨道梁4,所述轨道梁4顶部设有滑道2,所述轨道梁4两端分别设有三向步履式千斤顶1,两个所述三向步履式千斤顶1之间的滑道2上还设有集成滑块3,所述三向步履式千斤顶1、集成滑块3分别与所述控制器6通过无线连接,所述三向步履式千斤顶1、集成滑块3顶部用于放置待顶推的钢桁梁5,通过所述控制器6控制所述三向步履式千斤顶1向前顶推,实现钢桁梁5在所述集成滑块3上沿所述滑道2向前移动。
24.实际使用过程中,本发明通过在两个三向步履式千斤顶1之间的滑道2上设置集成滑块3,三向步履式千斤顶1、集成滑块3顶部用于放置待顶推的钢桁梁5,通过所述控制器6控制所述三向步履式千斤顶1向前顶推,实现钢桁梁5在所述集成滑块3上沿所述滑道2向前移动。本发明通过在两个三向步履式千斤顶1之间的滑道2上设置集成滑块3,可以满足在节点顶推的同时降低节点受力,在顶推过程中能自适应调整标高,有利于降低施工安全风险、加快施工进度。
25.实施例2优选的,在实施例1的基础上,本实施例中,所述轨道梁4为箱型或者工字型钢结构。
26.实际使用过程中,本发明所述轨道梁4为箱型或者工字型钢结构,轨道梁4可以为滑道2、三向步履式千斤顶1及集成滑块3提供竖向支撑。
27.实施例3优选的,在实施例1或实施例2的基础上,本实施例中,所述滑道2材料为不锈钢板,所述滑道2与所述集成滑块3的摩擦系数<0.08,所述三向步履式千斤顶1与所述钢桁梁5下弦杆的摩擦力>0.3。
28.实际使用过程中,本发明所述滑道2材料为不锈钢板,其特征为表面光滑、摩阻力力小,在较小的水平力作用下,集成滑块可沿纵向移动,所述滑道2与所述集成滑块3的摩擦系数<0.08,所述三向步履式千斤顶1与所述钢桁梁5下弦杆的摩擦力>0.3,假设单个支墩顶推阶段最大反力为f,前后三向步履式千斤顶1各承担1/9f,集成滑块3承担7/9f。三向步履式千斤顶1提供的前进摩擦力不小于2
×
1/9f
×
0.3=1/15f, 集成滑块3滑动需要的摩擦力不大于0.062f,满足钢梁顶推需求。
29.实施例4优选的,在实施例1或实施例3的基础上,如图6所示,本实施例中,所述三向步履式千斤顶1采用模块化设计,包括垂向千斤顶、水平千斤顶、纠偏千斤顶、千斤顶控制单元,所述垂向千斤顶设置有垂向千斤顶压力传感器、垂向千斤顶溢流阀、垂向千斤顶位移传感器,所述千斤顶控制单元通过所述垂向千斤顶压力传感器监测垂向千斤顶的液压油腔压力,并通过所述垂向千斤顶溢流阀进行压力调节,所述千斤顶控制单元通过所述垂向千斤顶位移传感器检测垂向千斤顶的伸缩端位移,所述水平千斤顶设置有水平千斤顶压力传感器、水平千斤顶溢流阀、水平千斤顶位移传感器,所述千斤顶控制单元通过所述水平千斤顶压力
传感器监测水平千斤顶的液压油腔压力,并通过所述水平千斤顶溢流阀进行压力调节,所述千斤顶控制单元通过所述水平千斤顶位移传感器检测水平千斤顶的伸缩端位移,所述纠偏千斤顶设置有纠偏千斤顶压力传感器、纠偏千斤顶溢流阀、纠偏千斤顶位移传感器,所述千斤顶控制单元通过所述纠偏千斤顶压力传感器监测纠偏千斤顶的液压油腔压力,并通过所述纠偏千斤顶溢流阀进行压力调节,所述千斤顶控制单元通过所述纠偏千斤顶位移传感器检测纠偏千斤顶的伸缩端位移,所述千斤顶控制单元设有wi-fi模块,所述三向步履式千斤顶1通过wi-fi模块与所述控制器6无线连接。
30.实际使用过程中,本发明所述三向步履式千斤顶1采用模块化设计,包括垂向千斤顶、水平千斤顶、纠偏千斤顶、千斤顶控制单元,其作用为:钢桁梁5顶推过程中,竖向千斤顶提供竖向力,水平千斤顶提供顶推前移水平力;顶推转换时作为支撑点提供竖向力;落梁时提供竖向支撑。千斤顶控制单元通过千斤顶压力传感器、千斤顶位移传感器,采集相应数据,经千斤顶控制单元的wi-fi模块与所述控制器6无线连接,通过控制器6发出的指令,实现垂向千斤顶、水平千斤顶、纠偏千斤顶的控制。
31.实施例5优选的,在实施例1或实施例4的基础上,如图2所示,本实施例中,所述集成滑块3包括集成滑块底座8、竖向千斤顶7、垫块9,所述竖向千斤顶7安装在所述集成滑块底座8上部,所述垫块9安装在所述竖向千斤顶7顶部,所述垫块9上表面设有橡胶垫10,所述集成滑块底座8下部设有四氟板11。
32.实际使用过程中,本发明通过所述集成滑块3设置的竖向千斤顶7,实现滑块在顶推过程中能主动调整竖向反力及竖向位移值,对于有竖曲线的钢桁梁提供一种顶推施工过程中精准的反力及竖向高程控制。
33.实施例6优选的,在实施例1或实施例4的基础上,如图5所示,本实施例中,所述竖向千斤顶7设置有竖向千斤顶控制单元、竖向千斤顶压力传感器、竖向千斤顶溢流阀、竖向千斤顶位移传感器,所述竖向千斤顶控制单元通过所述竖向千斤顶压力传感器监测竖向千斤顶7的液压油腔压力,并通过所述竖向千斤顶溢流阀进行压力调节,所述竖向千斤顶控制单元通过所述竖向千斤顶位移传感器检测竖向千斤顶7的伸缩端位移,所述竖向千斤顶控制单元设有竖向千斤顶wi-fi模块,所述竖向千斤顶7通过竖向千斤顶wi-fi模块与所述控制器6无线连接。
34.实际使用过程中,本发明通过控制器6、千斤顶控制单元控制竖向千斤顶7来实现精确控制支点反力及位移,确保钢桁梁5在顶推施工过程的安全。
35.实施例7一种用于钢桁梁主动调节的顶推方法,使用任一如上所述的一种用于钢桁梁主动调节的步履式顶推装置,包括如下步骤:s1:临时墩及墩旁支架的施工,临时墩采用钻孔灌注桩基础,墩旁支架利用永久结构承台墩身作为支撑结构,在墩旁支架上设置轨道梁4;s2:轨道梁4安装完成后,在拼装支架上进行钢桁梁5拼装,拼装一定数量的节段后准备向前顶推,如图3所示,将三向步履式千斤顶1支撑在钢桁梁5节点位置附近,在控制器6的控制下,三向步履式千斤顶1的垂向千斤顶启动,顶起钢桁梁5,将集成滑块3移动支撑在
钢桁梁5节点正下方位置;s3:集成滑块的竖向千斤顶启动,此时,三向步履式千斤顶与钢桁梁接触的静摩擦力大于集成滑块与滑道接触的最大静摩擦力,三向步履式千斤顶1的水平千斤顶启动,顶推钢桁梁5向前运动,三向步履式千斤顶1的水平千斤顶在顶推伸长到最大位置后关闭,集成滑块3的竖向千斤顶7启动顶推使三向步履式千斤顶1与钢桁梁5接触面分开,三向步履式千斤顶1的水平千斤顶收回,准备下一次顶推作业,重复上述过程实现三向步履式千斤顶1与集成滑块3交替顶推,集成滑块逐步由上一个节点移至下个节点;s4:一个节间顶推到位后,如图4所示,在控制器6的控制下,三向步履式千斤顶1将钢桁梁5顶起,利用卷扬机将集成滑块3回程移动至下一个节点位置,准备下一行程顶推作业,循环作业直至钢桁梁顶推到位。
36.所述步骤s3中,集成滑块3的竖向千斤顶7,在控制器6的控制下,动态调整由钢桁梁5纵坡竖曲线导致的竖向力及位移剧烈变化,使得支撑点的受力和设计值保持一致。
37.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
