1.本实用新型涉及陶瓷绝缘端子生产行业领域,具体是一种用于陶瓷绝缘端子生产行业的泥胚随动切割装置。
背景技术:
2.在陶瓷绝缘端子生产流程中,需要对挤泥机出口的泥胚进行切割分段,在传统的陶瓷绝缘端子生产流程中,由于挤泥机因原料材质的不同,会导致挤出速度不同,只通过一个方向的切割,就会导致切割的端面不平整,而且会随着挤出速度的变化而变化,这导致批量切割泥胚的质量不稳定。而对于泥胚切割的端面垂直度要求少有案例,绝大多数采用垂直上下切割,这种方式容易产生倾斜的端面,需要增加后续工艺来切除多余端面,同时如果挤出机速度变化,端面将不同程度倾斜,只能通过人工处理了。现有的切割装置原理主要有摆角式,这种机构只能在挤出机挤出速度恒定时,通过调整摆角才能切割垂直的端面。
3.如中国专利号为201410059020.6的一种用于scr脱硝催化剂的自动切割设备及切割方法中,该输送装置及切割装置分别安装在该随动装置上并与该随动装置一体运动,该控制系统分别与该输送装置、随动装置和切割装置连接,该随动装置用于保证该切割装置切割时该工件与该切割装置之间相对静止,该随动装置的移动速度等于该真空挤出机挤出该工件的速度时,该切割装置启动切割达到该设定长度的该工件,被切割下的该工件通过该输送装置快速输送至后续工序,该专利的随动是通过伺服电机带动的,并且只有切割丝的张紧机构,而没有断丝检测的机构,该专利通过皮带输送线,结构复杂,同时需要检测工件的速度,不能实时适应工件的速度。
4.因此,现需提供一种适用广泛,结构简单,并且可自动调整的泥胚自动化切割装置,可以高效的、质量稳定的进行泥胚切割。
技术实现要素:
5.为了解决上述问题,本实用新型提出一种用于陶瓷绝缘端子生产行业的泥胚随动切割装置。
6.一种用于陶瓷绝缘端子生产行业的泥胚随动切割装置,包括支撑座、与支撑座配合的支架,包括:
7.随动机构,设置在支撑座与支架上,根据泥胚的需要进行随动切割;
8.断丝检测机构,设置在随动机构上,通过检测判断并提醒操作人员是否需要维护。
9.所述的随动机构包括设置在支撑座上且与支架配合的直线导轨、设置在支架上的导轨、设置在支架上且与导轨配合的切割机构、设置在支撑座上用于使得切割机构切割完成后归原位的归位气缸、设置在支架上且与归位气缸配合接住泥胚的接触机构。
10.所述的切割机构包括切割钢丝、设置在支架上用于提供切割动力的下压气缸、与下压气缸配合用于固定切割钢丝的切割架子。
11.所述的切割架子通过导轨与支架滑动配合。
12.所述的切割架子为u型,通过开口两端处固定切割钢丝。
13.所述的接触机构包括设置在支架上的横板、设置在横板上的顶升气缸、与顶升气缸连接用于接住泥胚并与泥胚间产生摩擦力的接触块。
14.所述的接触块的纵向截面为与泥胚外端面匹配的c型。
15.所述的断丝检测机构包括设置在切割架子开口处的接近开关、与接近开关配合且与切割钢丝连接的连接轴,所述的连接轴上设置有弹簧。
16.本实用新型的有益效果是:本实用新型解决了泥胚切割面不垂直的难题,实现了切割自动化生产,解决了泥胚切割不垂直的根本问题,提升了产品的质量,减少了后续工艺;可适应不同挤泥机,可根据不同挤出速度,自行调整,适用性广,灵活性强;相较于其他切割设备,本实用新型结构简单,切割质量高,自动调整,无需人工干预。
附图说明
17.下面结合附图和实施例对本实用新型进一步说明。
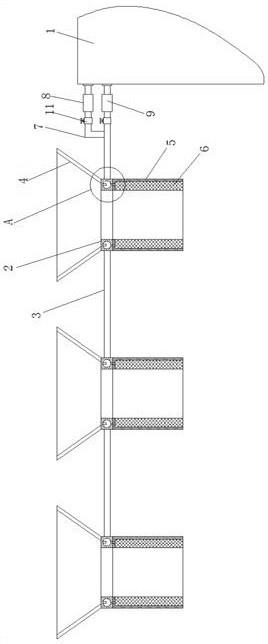
18.图1为本实用新型的主视结构示意图;
19.图2为本实用新型的立体结构示意图;
20.图3为本实用新型的图1的i局部放大结构示意图。
具体实施方式
21.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面对本实用新型进一步阐述。
22.如图1至图3所示,一种用于陶瓷绝缘端子生产行业的泥胚随动切割装置,包括支撑座11、与支撑座11配合的支架9,包括:
23.随动机构,设置在支撑座11与支架9上,根据泥胚的需要进行随动切割;
24.断丝检测机构5,设置在随动机构上,通过检测判断并提醒操作人员是否需要维护。
25.本实用新型解决了泥胚切割面不垂直的难题,实现了切割自动化生产,解决了泥胚切割不垂直的根本问题,提升了产品的质量,减少了后续工艺;可适应不同挤泥机,可根据不同挤出速度,自行调整,适用性广,灵活性强;相较于其他切割设备,本实用新型结构简单,切割质量高,自动调整,无需人工干预。
26.所述的随动机构包括设置在支撑座11上且与支架9配合的直线导轨7、设置在支架9上的导轨2、设置在支架9上且与导轨2配合的切割机构、设置在支撑座11上用于使得切割机构切割完成后归原位的归位气缸6、设置在支架9上且与归位气缸6配合接住泥胚的接触机构。
27.所述的归位气缸6不工作时不接触横板12。
28.所述的导轨2是用于保证运动方向是垂直的,便于切割钢丝4切割。
29.所述的归位气缸6是当随动切割完成后,通过归位气缸6使切割机构回到原来的位置。
30.所述的切割机构包括切割钢丝4、设置在支架9上用于提供切割动力的下压气缸1、与下压气缸1配合用于固定切割钢丝4的切割架子10。
31.所述的切割架子10通过导轨2与支架9滑动配合。
32.所述的切割架子10为u型,通过开口两端处固定切割钢丝4。
33.所述的接触机构包括设置在支架9上的横板12、设置在横板12上的顶升气缸8、与顶升气缸8连接用于接住泥胚并与泥胚间产生摩擦力的接触块3。
34.所述的接触块3能够接住泥胚,同时与泥胚间产生摩擦力,让泥胚推动整个切割机构。
35.由于切割的速度很快,只要接触块3碰到泥胚后,就可以切割了,实际泥胚运动的距离就是泥胚的速度
×
切割的时间。
36.所述的接触块3的纵向截面为与泥胚外端面匹配的c型。
37.所述的断丝检测机构5包括设置在切割架子10开口处的接近开关51、与接近开关51配合且与切割钢丝4连接的连接轴53,所述的连接轴53上设置有弹簧52。
38.所述的断丝检测机构5中的切割丝是绷紧的,弹簧52是压缩状态,如果切割钢丝4断裂,弹簧52就会张开,使连接轴移动,从而使接近开关51检测到,实际作用是检测切割钢丝4是否断裂。
39.使用方法:当接触块3顶升起来碰到挤出的泥胚,就会带动直线导轨7整体随动,这时下压气缸1带动切割钢丝4下压切割,切割后归位气缸6推动整体回到原位,在此过程中如果切割钢丝4断开,断丝检测机构5机构通过接近开关可以判断出来,提醒操作人员需要维护,通过接触块3与挤出的泥胚接触,实现整体速度与泥胚挤出速度匹配,从而达到切割时,切割钢丝4与泥胚没有相对运动,切割的端面即为垂直端面。
40.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。