1.本实用新型涉及宠物机器人领域,尤其是涉及一种宠物伴侣机器人。
背景技术:
2.随着城市节奏的加快,人们的学习与工作变得愈发忙碌,能够在家与宠物相伴的时间也因之受到挤压。因为工作或者学习等等原因,人们无法按时带着他们的宠物去散步,而遛狗对于宠物而言意义重大——遛狗不仅仅意味着带宠物下楼运动、排便,更多的是帮助宠物维持身心健康,保持社会化。
3.市面上的宠物伴侣机器人主要以陪伴宠物进行娱乐,对宠物进行喂食等功能为主打,然而,对于宠物外出娱乐所必备的牵引绳系统,市场上却很难找到:牵引绳不仅仅是对于在当下国内宠物外出的基本要求,其内在也是对于路人和宠物自身的双向保护。
技术实现要素:
4.为了克服现有技术存在的缺陷,本实用新型提供了一种宠物伴侣机器人,各系统独立驱动,相对独立但不孤立,各传动装置根据其功能选择杆件传动、齿轮传动及传动带传动等传动方式,整体结构简单,便于安装和维护。
5.本实用新型解决其技术问题所采用的技术方案是:
6.一种宠物伴侣机器人包括六轮动力系统、监控系统、粪便清理系统、喂食系统和牵引绳放缩系统五部分,所述六轮动力系统包括下底板和六个动力轮,其中前四个动力轮分别与四个车轮电机连接,四个车轮电机分别安装在车轮电机支架上,四个车轮电机支架分别通过四边形缓震结构安装在下底板上,左右两侧同一侧的两个四边形缓震结构通过一根横杆联动;后两个动力轮分别与两个后驱动电机连接,两个后驱动电机分别安装在后驱动电机支架上,两个后驱动电机支架分别通过三角形缓震结构安装在下底板的后端左右两侧上,同时后两个动力轮之间还设有连接板,该连接板向后下方倾斜布置,同时与两个三角形缓震结构连接;所述粪便清理系统通过曲柄摇杆机构安装在下底板的底部前侧上,上层板与四个四边形缓震结构的上端铰接,所述喂食系统设置在上层板与下底板之间,所述牵引绳放缩系统安装在上层板上,所述监控系统位于牵引绳放缩系统的前方并且安装在上层板的前端上。
7.进一步,两个三角形缓震结构左右对称布置,每个三角形缓震结构均包括两个三角形缓震连杆机构,两个三角形缓震连杆机构左右对称布置,每个三角形缓震连杆机构均包括一根第一三角形缓震连杆、一根第二三角形缓震连杆、一根第一减震弹簧和一个第一l型支架,所述第一三角形缓震连杆的前端与第一l型支架铰接,第一l型支架固定安装在下底板的后端上,所述第二三角形缓震连杆的前端与第一三角形缓震连杆的后端铰接,所述第一三角形缓震连杆的中部与第二三角形缓震连杆的中部通过第一减震弹簧连接,第一减震弹簧向后下方倾斜;位于外侧的第二三角形缓震连杆的后端通过第二l型支架与相应的后驱动电机支架铰接,位于内侧的第二三角形缓震连杆的后端通过第三l型支架与连接板
铰接。
8.再进一步,所述四边形缓震结构包括四根四边形连杆、一根长杆、一根短杆和两个第二减震弹簧,所述长杆竖向布置,其上部和下部分别设有上腰型槽和下腰型槽,四根四边形连杆组成一个四边形结构,包括第一四边形连杆、第二四边形连杆、第三四边形连杆和第四四边形连杆,所述第一四边形连杆的上端与第二四边形连杆的上端通过上销轴铰接,同时上销轴与上腰型槽配合可上下滑动连接,所述第一四边形连杆的下端与第三四边形连杆的上端通过前销轴铰接,第二四边形连杆的下端与第四四边形连杆的上端通过后销轴铰接,所述第三四边形连杆的下端与第四四边形连杆的下端通过下销轴铰接,同时下销轴与下腰型槽配合可上下滑动连接;所述第一四边形连杆的中部与第三四边形连杆的中部通过一个第二减震弹簧连接,所述第二四边形连杆的中部与第四四边形连杆的中部通过另一个第二减震弹簧连接;
9.所述短杆的上端与长杆铰接,铰接点位于下腰型槽与上腰型槽之间,所述短杆的下端与横杆铰接,所述长杆的下端与横杆的端部铰接,所述长杆的上端通过短l型架与上层板连接;四边形结构的下端通过长l型架与车轮电机支架连接。
10.再进一步,所述粪便清理系统包括清理铲和方槽,所述方槽位于下底板的下方,所述清理铲与方槽的前端连接,所述方槽的左右两侧分别通过伸缩连杆机构与下底板连接;
11.所述曲柄摇杆机构包括摇杆舵机、摇杆和曲柄,所述摇杆舵机安装在下底板的底部上,其舵盘与摇杆的后端连接,摇杆的前端与曲柄的后部连接,曲柄的前端与方槽连接。
12.再进一步,所述喂食系统包括食槽、前连杆机构、后连杆机构和喂食电机,所述食槽位于下底板的中部,并且其前端通过前连杆机构与下底板连接,其后端通过后连杆机构与上层板连接,所述喂食电机安装在下底板上并且其输出轴上设有驱动齿轮,所述食槽的侧面固定两个传动齿轮,两个传动齿轮位于驱动齿轮的上方并且与驱动齿轮配合,喂食电机带动驱动齿轮拨动两个传动齿轮,带动食槽实现前后移动。
13.再进一步,所述监控系统包括用于采集宠物位置数据的摄像头、倒u型架、用于驱动倒u型架前后摆动的第一舵机和第二舵机,所述摄像头通过摄像头支架安装在倒u型架的顶面上,倒u型架的下端单侧安装在第一舵机的舵盘上,所述第一舵机通过第一舵机支架安装在第二舵机的舵盘上,第二舵机用于带动第一舵机支架及其上部件一起转动,第二舵机安装在第二舵机支架上,第二舵机支架通过l型支架安装在上层板上。
14.再进一步,所述牵引绳放缩系统包括牵引绳轮盘、轮盘电机、主动带轮、从动带轮、转动电机和轮盘支架,所述转动电机通过转动电机支架安装在上层板上,并且其输出轴与主动带轮连接,从动带轮可转动的安装在上层板上,并且通过传动带与主动带轮连接,所述牵引绳轮盘通轮盘支架安装在从动带轮上端面上,所述牵引绳轮盘可转动的安装在轮盘支架的上端左侧上,所述轮盘电机通过轮盘电机支架安装在轮盘支架的上端右侧上,并且轮盘电机的输出轴上设有主动齿轮,所述牵引绳轮盘的侧面上设有从动齿轮,主动齿轮与从动齿轮啮合。
15.更进一步,所述机器人还包括工控机,工控机安装在工控机支架上,工控机支架安装在上层板上,所述监控系统与工控机连接,所述工控机与单片机连接,单片机分别与六轮动力系统、粪便清理系统、喂食系统和牵引绳放缩系统连接。
16.本实用新型的有益效果主要表现在:实现了宠物外出时原本人所需要完成的粪便
清理、牵绳、喂食等工作,整体机构可适应各种地形,满足宠物外出时经过的复杂地形条件需求;该宠物伴侣机器人整体结构简单,可更换性强,可适用于不同的宠物,能够有效提升宠物外出的安全性。
附图说明
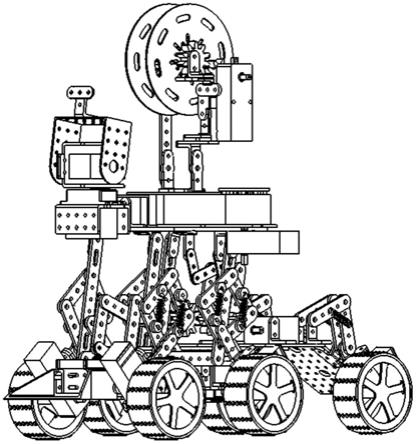
17.图1为本实用新型的整体结构图。
18.图2为本实用新型的左视图。
19.图3为本实用新型后部局部放大图。
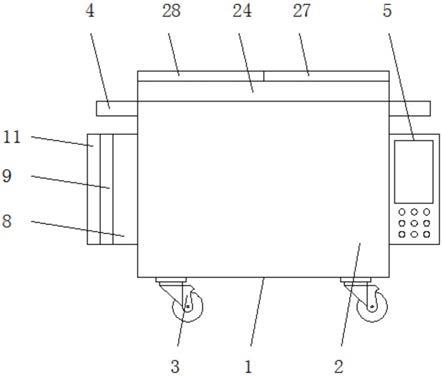
20.图4为本实用新型的正视图。
21.图5为六轮动力系统的俯视图。
22.图6为本实用新型的四边形缓震结构局部放大图。
23.图7为本实用新型的仰视图。
24.图8为粪便清理系统的侧视图。
25.图9为牵引绳放缩系统的侧视图。
26.图10为牵引绳放缩系统的正视图。
27.图11为牵引绳放缩系统的俯视图。
28.图12为牵引绳放缩系统带轮放大图。
29.图13为喂食系统局部放大图。
具体实施方式
30.下面结合附图对本实用新型作进一步描述。
31.参照图1~图13,一种宠物伴侣机器人,包括六轮动力系统、监控系统、粪便清理系统、喂食系统和牵引绳放缩系统五部分,所述六轮动力系统包括下底板和六个动力轮,其中前四个动力轮分别与四个车轮电机连接,四个车轮电机分别安装在车轮电机支架上,四个车轮电机支架分别通过四边形缓震结构安装在下底板上,左右两侧同一侧的两个四边形缓震结构通过一根49横杆联动;后两个动力轮分别与两个后驱动电机连接,两个后驱动电机分别安装在后驱动电机支架上,两个后驱动电机支架分别通过三角形缓震结构安装在下底板的后端左右两侧上,同时后两个动力轮之间还设有连接板,该连接板向后下方倾斜布置,同时与两个三角形缓震结构连接;所述粪便清理系统通过曲柄摇杆机构安装在下底板的底部前侧上,上层板与四个四边形缓震结构的上端铰接,所述喂食系统设置在上层板与下底板之间,所述牵引绳放缩系统安装在上层板上,所述监控系统位于牵引绳放缩系统的前方并且安装在上层板的前端上。
32.如图3、图5所示,所述六轮动力系统框架主要由铝合金构件构成,下底板主要由一块铝板16和两块铝板13、14构成,在后两个动力轮之间的连接板为铝板15,铝板13、14与铝板16通过板材上所预留孔位直接连接,铝板13与电机1之间、铝板14与电机6之间分别设置一个三角形缓震结构,两个三角形缓震结构左右对称布置,每个三角形缓震结构均包括两个三角形缓震连杆机构,两个三角形缓震连杆机构左右对称布置,每个三角形缓震连杆机构均包括一根第一三角形缓震连杆、一根第二三角形缓震连杆、一根第一减震弹簧和一个第一l型支架,所述第一三角形缓震连杆的前端与第一l型支架铰接,第一l型支架固定安装
在下底板的后端上,所述第二三角形缓震连杆的前端与第一三角形缓震连杆的后端铰接,所述第一三角形缓震连杆的中部与第二三角形缓震连杆的中部通过第一减震弹簧连接,第一减震弹簧向后下方倾斜;位于外侧的第二三角形缓震连杆的后端通过第二l型支架与相应的后驱动电机支架铰接,位于内侧的第二三角形缓震连杆的后端通过第三l型支架与连接板铰接;
33.第一l型支架17、18均安装在铝板13上,同时分别与第一三角形缓震连杆24、23铰接,第一l型支架19、20均安装在铝板14上,同时分别与第一三角形缓震连杆22、21铰接,第一三角形缓震连杆21与第二三角形缓震连杆25的中间孔之间通过第一减震弹簧32连接,第一三角形缓震连杆22与第二三角形缓震连杆26的中间孔之间通过第一减震弹簧31连接,第一三角形缓震连杆23与第二三角形缓震连杆27的中间孔之间通过第一减震弹簧29连接,第一三角形缓震连杆24与第二三角形缓震连杆28的中间孔之间通过第一减震弹簧30连接;构成一个具有良好结构强度的三角形缓震结构,并通过弹簧29、30、31、32起到良好避震作用;
34.第二三角形缓震连杆25的后端通过第二l型支架34与后驱动电机支架36铰接,第二三角形缓震连杆26的后端通过第三l型支架101与连接板铰接,第二三角形缓震连杆28的后端通过第二l型支架33与后驱动电机支架35铰接,第二三角形缓震连杆27的后端通过第三l型支架102与连接板铰接。后驱动电机1安装在后驱动电机支架35上,后驱动电机6安装在后驱动电机支架36上。
35.如图6所示,所述四边形缓震结构包括四根四边形连杆、一根长杆38、一根短杆和两个第二减震弹簧,所述长杆38竖向布置,其上部和下部分别设有上腰型槽和下腰型槽,四根四边形连杆组成一个四边形结构,包括第一四边形连杆39、第二四边形连杆41、第三四边形连杆44和第四四边形连杆46,所述第一四边形连杆39的上端与第二四边形连杆41的上端通过上销轴铰接,同时上销轴与上腰型槽配合可上下滑动连接,所述第一四边形连杆39的下端与第三四边形连杆44的上端通过前销轴铰接,第二四边形连杆41的下端与第四四边形连杆46的上端通过后销轴铰接,所述第三四边形连杆44的下端与第四四边形连杆46的下端通过下销轴铰接,同时下销轴与下腰型槽配合可上下滑动连接;所述第一四边形连杆39的中部与第三四边形连杆44的中部通过一个第二减震弹簧连接,所述第二四边形连杆41的中部与第四四边形连杆46的中部通过另一个第二减震弹簧连接;
36.所述短杆的上端与长杆铰接,铰接点位于下腰型槽与上腰型槽之间,所述短杆的下端与横杆铰接,所述长杆38的下端与横杆的端部铰接,所述长杆38的上端通过短l型架37与上层板连接;四边形结构的下端通过长l型架50与车轮电机支架51连接。
37.第二减震弹簧42、45通过小圆垫片40、43、47、48悬挂在四边形结构外侧,四边形连杆外端两两相连,长杆38从上下两个铰接点穿过并安装在横杆49上。所述四边形缓震结构在车体上共有四处,作为前方两个车轮电机与中部两个电机的连接、缓震方式。以上两种缓震结构连接着六台电机组成了车体,其中,动力轮7、8、9、10、11、12依次安装在车轮电机1、2、3、4、5、6上。四边形缓震结构可以有效缓震,达到上层的监控系统和牵引绳放缩系统稳定的目的。
38.如图7、图8所示,所述粪便清理系统包括清理铲和方槽,所述方槽位于下底板的下方,所述清理铲与方槽的前端连接,所述方槽的左右两侧分别通过伸缩连杆机构与下底板连接。
39.所述曲柄摇杆机构包括摇杆舵机52、摇杆53和曲柄54,所述摇杆舵机52安装在下底板的底部上,其舵盘与摇杆53的后端连接,摇杆53的前端与曲柄54的后部连接,曲柄54的前端与方槽55连接。
40.由摇杆舵机52通过舵机支架60和短l型架59固定在下底板底部上,摇杆53连接在摇杆舵机52的舵盘上作为原动件,带动曲柄54和安装在其前端的55方槽和安装在方槽前端的56铲子前后往复运动,方槽55的两侧通过短l型架61与伸缩连杆机构连接,伸缩连杆机构包括连杆62、58、57,连杆57的前端与方槽55铰接,连杆57的后端与连杆58的下端铰接,连杆58的上端与连杆62的下端铰接,连杆62的上端通过短l型支架61与下底板铰接。
41.如图9、图10、图11、图12所示,所述监控系统包括摄像头、倒u型架71、用于驱动倒u型架71前后摆动的第一舵机77和第二舵机69,所述摄像头通过摄像头支架72安装在倒u型架71的顶面上,倒u型架71的下端单侧安装在第一舵机77的舵盘上,所述第一舵机77通过第一舵机支架70安装在第二舵机69的舵盘上,第二舵机69用于带动第一舵机支架70及其上部件一起转动,第二舵机69安装在第二舵机支架75上,第二舵机支架通过l型支架68安装在上层板上。
42.第二舵机69通过两侧螺丝固定在第二舵机支架75上,第一舵机支架70的侧面固定在第二舵机69的舵盘上,第一舵机77侧向固定在第一舵机支架70上,倒u型架单侧固定在第一舵机77的舵盘上,摄像头支架72固定倒在u型架71水平于地面的面上。
43.所述牵引绳放缩系统包括牵引绳轮盘74、轮盘电机65、主动带轮82、从动带轮78、转动电机67和轮盘支架73,所述转动电机67通过转动电机支架安装在上层板上,并且其输出轴与主动带轮82连接,从动带轮78可转动的安装在上层板上,并且通过传动带66与主动带轮82连接,所述牵引绳轮盘74通轮盘支架73安装在从动带轮78上端面上,所述牵引绳轮盘74可转动的安装在轮盘支架73的上端左侧上,所述轮盘电机65通过轮盘电机支架安装在轮盘支架73的上端右侧上,并且轮盘电机65的输出轴上设有主动齿轮64,所述牵引绳轮盘74的侧面上设有从动齿轮63,主动齿轮64与从动齿轮63啮合。
44.上层板由铝板79、80拼接而成,主动带轮82由上层小圆盘84通过八根螺柱与下层小圆盘85连接,从动带轮78由上层大圆盘87通过八根螺柱与下层小圆盘86连接,通过小圆盘圆心处转动轴与上层板连接,从动带轮78与主动带轮82间通过传动带66连接,带动牵引绳放缩系统转向。转动电机支架由条状电机支架81、82组成。
45.所述被牵引宠物主要为小型犬类或小型猫科动物。
46.进一步的,所述各个部件除六轮动力系统做为主要动力来源与监控系统作为控制来源外,其余都为可选用、拆卸部分,便于整体机械的维护、升级。牵引绳放缩系统所述的各齿轮比、带轮直径,都可做调整以应对不同的输出力要求。
47.所述机器人还包括工控机,工控机安装在工控机支架76上,工控机支架76安装在上层板上,所述监控系统与工控机连接,工控机与单片机连接,单片机分别与六轮动力系统、粪便清理系统、喂食系统和牵引绳放缩系统连接。工控机为一个小电脑。
48.如图13所示,所述喂食系统包括食槽89、前连杆机构、后连杆机构和喂食电机99,所述食槽89位于下底板的中部,并且其前端通过前连杆机构与下底板连接,其后端通过后连杆机构与上层板连接,所述喂食电机99安装在下底板上并且其输出轴上设有驱动齿轮100,所述食槽89的侧面固定两个传动齿轮,两个传动齿轮92、93位于驱动齿轮的上方并且
与驱动齿轮100配合,喂食电机99带动驱动齿轮拨动两个传动齿轮92、93,带动食槽89实现前后移动;
49.喂食电机99通过短l型架98安装在下底板上,食槽89上固定两不可旋转的传动齿轮,所述前连杆机构包括两根连杆88、两根连杆91和一根连杆90,两根连杆88的后端分别与食槽89前端左右两侧铰接,两根连杆88的前端分别与两根连杆91的上端铰接,两根连杆91的下端同时与连杆90的上端铰接,连杆90的下端通过铝型材安装在下底板上;所述后连杆机构包括两根连杆97、两根连杆96和两根连杆94,两根连杆97的下端分别与食槽89的后端左右两侧铰接,两根连杆97的上端分别与两根连杆96的后端铰接,两根连杆96的前端分别与两根连杆94的下端铰接,两根连杆94的上端分别通过两个短l型架95与上层板连接,喂食电机99驱动齿轮100转动时,传动齿轮93、92无转动地向前或向后运动,带动食槽89进行前后运动。
50.本实用新型的工作原理为:在摄像头采集宠物位置后将数据发送给工控机进行处理,后将数据传送给单片机。通过工控机处理的数据以及单片机发出的信号,本宠物伴侣机器人可达到跟随宠物运动,通过粪便清理系统清理宠物粪便,通过喂食系统吸引宠物注意力,通过牵引绳放缩系统调整宠物牵引绳朝向,保证宠物处于机器周围合适的半径内等功能。
51.宠物伴侣机器人的下底板结构运用了了类月球车的六轮驱动结构,采用直流电机六轮驱动,动力充足。机器人的尾部设有三角形缓震结构,三角形缓震结构的主要作用是连接车轮与下底板。行驶在凹凸不平的路面时,车轮在竖直方向振动,三角形缓震结构要消耗掉车轮的振动能量,减小底盘的振幅,这就增加了宠物伴侣机器人行进的平顺性。三角形缓震结构与前面四车轮的四边形缓震结构结合形成完备的避震系统,使宠物伴侣机器人能够适应不同的路况,减少因路况导致的打滑、停滞不前,带给宠物更好的散步体验。并且,本机器人动力系统主要位于机构下方,这大大降低了机器的重心,能有效提高机器摩擦力,减少打滑。如是,机器人拥有充足的动力与优越的越野性能,能够有效贴合遛狗时宠物喜欢在草地、泥潭等各种不同场合玩耍的情景,实现全地形遛狗。
52.本实用新型用于解决人们无法按时遛狗的问题,通过解决此问题,更好地帮助人们照顾宠物,提高养宠人、宠物双方的生活质量。使之成为一款可以针对宠物运动状态实时调节牵引绳收、放的宠物牵引绳收放功能的系统。
53.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。