技术特征:
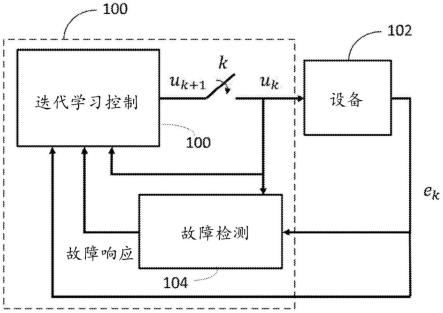
1.一种双辊铸造系统,包括:一对反向旋转的铸辊,该对反向旋转的铸辊在所述铸辊之间具有辊隙并且能够从所述辊隙向下输送铸带,所述辊隙能够调节;铸辊控制器,被配置为响应于控制信号调节所述铸辊之间的所述辊隙;铸带传感器,所述铸带传感器能够测量所述铸带的至少一个参数并生成带测量信号;以及迭代学习控制(ilc)控制器,所述ilc控制器与所述铸带传感器耦合以接收来自所述铸带传感器的带测量信号,并且与所述铸辊控制器耦合以向所述铸辊控制器提供控制信号,所述ilc控制器包括:故障检测算法,所述故障检测算法接收所述控制信号和所述带测量信号,并生成故障检测信号以指示何时检测到故障状况;以及迭代学习控制算法,所述迭代学习控制算法基于所述带测量信号和所述故障检测信号生成所述控制信号;其中当所述故障检测算法检测到所述控制信号超过上控制饱和阈值或所述ilc控制器运行在不保证稳定的状态中的至少一个时,所述故障检测算法指示故障状况。2.根据权利要求1所述的系统,其中将所述控制信号的无穷范数(∞范数)与所述上控制饱和阈值进行比较。3.根据权利要求1所述的系统,还包括下控制饱和阈值,并且如果所述控制信号的无穷范数(∞范数)超过所述上控制饱和阈值,则所述故障检测算法指示故障状况,并且如果所述控制信号的所述无穷范数小于所述下控制饱和阈值,则所述故障检测算法不指示故障状况。4.根据权利要求3所述的系统,其中如果所述控制信号的所述无穷范数在所述上控制饱和阈值和所述下控制饱和阈值之间,则如果误差信号的p范数超过作为所述控制信号的无穷范数的函数变化的阈值,则所述故障检测算法指示故障状况。5.根据权利要求1所述的系统,其中当所述误差信号的当前p范数大于所述误差信号的初始p范数时,所述故障检测算法确定所述ilc控制器运行在不保证稳定的状态。6.根据权利要求1所述的系统,其中当所述控制信号的p范数正在增加时,所述故障检测算法确定所述ilc控制器运行在不保证稳定的状态。7.根据权利要求1所述的系统,其中所述ilc控制器被配置为响应于指示故障状况的所述故障检测信号重新调谐一个或多个迭代学习控制算法滤波器。8.根据权利要求1所述的系统,其中所述铸带传感器包括厚度计,所述厚度计测量横跨所述铸带的宽度的间隔中的所述铸带的厚度。9.根据权利要求1所述的系统,其中所述铸辊控制器还包括动态可调节的楔形控制器,并且响应于来自所述ilc控制器的所述控制信号,所述辊隙能够通过所述楔形控制器来调节。10.根据权利要求1所述的系统,其中所述铸辊包括用于调节所述辊隙的膨胀环,并且铸辊控制器响应于来自所述ilc控制器的所述控制信号控制所述膨胀环。11.根据权利要求1所述的系统,其中所述铸带传感器针对至少一个周期性干扰测量所述铸带,并且所述迭代学习控制算法被适配为降低所述至少一个周期性干扰的严重性。
12.一种减少双辊铸造系统中铸带金属产品的周期性干扰的方法,所述双辊铸造系统具有一对反向旋转的铸辊,该对反向旋转的铸辊在所述铸辊之间的辊隙处生产铸带,所述辊隙能够通过铸辊控制器调节,迭代学习控制算法生成控制信号,以及故障检测算法生成故障检测信号;所述方法包括:向所述铸辊控制器提供所述控制信号;测量所述铸带的至少一个参数;基于所述控制信号和所述铸带的所述至少一个参数计算误差信号;向所述故障检测算法提供所述控制信号和所述误差信号;当所述故障检测算法确定所述控制信号的无穷范数超过上阈值时,经由故障检测信号指示故障状况;通过所述迭代学习控制算法基于所述误差信号和所述故障检测信号生成所述铸辊控制器的控制信号;其中所述铸辊控制器响应于来自所述迭代学习控制算法的所述控制信号来调节所述辊隙,以减少所述周期性干扰。13.根据权利要求12所述的方法,还包括下阈值,并且如果所述控制信号的所述无穷范数小于所述下阈值,则所述故障检测算法不指示故障状况。14.根据权利要求13所述的方法,其中如果所述控制信号的所述无穷范数在所述上阈值和所述下阈值之间,则如果误差信号的p范数超过作为所述控制信号的所述无穷范数的函数变化的阈值,则所述故障检测算法指示故障状况。15.根据权利要求12所述的方法,还包括当所述误差信号的当前p范数大于所述误差信号的初始p范数时通过所述故障检测算法生成故障检测信号的步骤。16.根据权利要求12所述的方法,还包括当所述控制信号的当前p范数正在增加时通过所述故障检测算法生成故障检测信号的步骤。17.根据权利要求12所述的方法,还包括响应于指示故障的所述故障检测信号使一个或多个迭代学习控制器滤波器失谐的步骤。18.根据权利要求12所述的方法,其中所述铸辊控制器控制动态可调节的楔形控制器,并且响应于所述控制信号,所述辊隙能够通过所述楔形控制器来调节。19.根据权利要求12所述的方法,其中所述铸辊包括膨胀环以调节所述辊隙,并且铸辊控制器响应于所述控制信号控制所述膨胀环。20.一种双辊铸造系统,包括:一对反向旋转的铸辊,该对反向旋转的铸辊在所述铸辊之间具有辊隙并且能够从所述辊隙向下输送铸带,所述辊隙能够调节;铸辊控制器,被配置为响应于控制信号调节所述铸辊之间的所述辊隙;铸带传感器,所述铸带传感器能够测量所述铸带的至少一个参数并生成带测量信号;以及迭代学习控制(ilc)控制器,所述ilc控制器与所述铸带传感器耦合以接收来自所述铸带传感器的带测量信号,并且与所述铸辊控制器耦合以向所述铸辊控制器提供控制信号,所述ilc控制器包括:故障检测算法,所述故障检测算法接收所述控制信号和所述带测量信号并生成故障检
测信号以指示何时检测到故障状况;以及迭代学习控制算法,所述迭代学习控制算法基于所述带测量信号和所述故障检测信号生成所述控制信号;其中当所述故障检测算法检测到所述ilc控制器运行在不保证稳定的状态或当所述ilc控制器不满足预定义的性能规范时,所述故障检测算法指示故障状况。
技术总结
双辊铸造系统包括:一对反向旋转的铸辊,其间具有可调节的辊隙;铸辊控制器,被配置为响应于控制信号调节所述铸辊之间的辊隙;铸带传感器,其测量所述铸带的参数并生成带测量信号;以及迭代学习控制(ILC)控制器,其接收所述带测量信号并向所述铸辊控制器提供控制信号。所述ILC控制器包括接收所述控制信号和所述带测量信号并生成指示何时检测到故障状况的故障检测信号的故障检测算法,以及生成所述控制信号的迭代学习控制算法。所述故障检测算法在检测到所述控制信号超过上控制饱和阈值或所述ILC控制器运行在不保证稳定的状态时指示故障状况。障状况。障状况。
技术研发人员:F.M.布朗 G.T.C.邱 N.J.桑达拉姆 H.B.里斯
受保护的技术使用者:纽科尔公司
技术研发日:2020.10.28
技术公布日:2022/8/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。