1.本实用新型涉及电动工具,并且更具体地涉及圆锯。
背景技术:
2.通常,圆锯包括锯片,该锯片特别地被配置为切割由多种材料(例如金属、纤维或木材)制成的工件。
技术实现要素:
3.在第一方面,本实用新型提供了一种圆锯,包括:刀片防护件和至少部分地封闭在刀片防护件内的锯片。锯片具有大于6英寸的外径。圆锯还包括:联接到刀片防护件的马达壳体,支撑在马达壳体内的无刷电动马达,以及用于向无刷电动马达提供电力的电池组。
4.可选地,电池组具有小于20伏的标称电压。
5.可选地,电池组被配置为向无刷电动马达输出至少100安培的电流。
6.可选地,电池组被配置为提供至少1800瓦的功率输出。
7.可选地,无刷电动马达具有输出轴,输出轴具有小齿轮,输出轴限定马达旋转轴线;以及圆锯还包括驱动齿轮,驱动齿轮具有与马达旋转轴线平行的驱动轴线。
8.可选地,驱动轴线是锯片的旋转轴线。
9.可选地,锯片由无刷电动马达驱动,以在每分钟3500转至每分钟4000 转的范围内旋转。
10.可选地,无刷电动马达可以每分钟大于15000转的最大速度操作。
11.可选地,锯片的外径大于8英寸。
12.可选地,锯片被配置为切割金属。
13.可选地,圆锯还包括联接到刀片防护件的盖,在切割操作期间,碎屑收集在盖中。
14.在第二方面,本实用新型提供了一种圆锯,包括:刀片防护件,至少部分地封闭在刀片防护件内的锯片,联接到刀片防护件的马达壳体,以及支撑在马达壳体内的电动马达。电动马达包括输出轴,输出轴可以每分钟大于 15000转的最大速度操作。圆锯还包括用于向电动马达提供电力的电池组,电池组具有高达20伏的标称电压,并被配置为向电动马达输出至少100安培的电流,以提供至少1800瓦的功率输出。
15.可选地,圆锯还包括联接到刀片防护件的盖,在切割操作期间,碎片收集在盖中。
16.可选地,锯片具有大于6英寸的外径。
17.可选地,刀片防护件限定排气室,并且电动马达包括风扇,并且圆锯还包括第一挡板和第二挡板,其将气流从风扇引导到排气室。
18.在第三方面,本实用新型提供了一种圆锯,包括:限定排气室的刀片防护件,联接到刀片防护件的马达壳体,以及定位在马达壳体内的无刷电动马达。无刷电动马达包括输出轴和联接成与输出轴一起旋转的风扇。风扇包括底板和从底板延伸的多个叶片。圆锯还包括位于风扇附近并与底板成面对关系的第一挡板、位于风扇的径向外侧的第二挡板,以
及用于向无刷电动马达提供电力的电池组。响应于无刷电动马达的激活,风扇轴向地引起冷却气流通过无刷电动马达,并且风扇被配置为沿径向方向将冷却气流重新引导到第二挡板。第二挡板被配置为沿轴向方向朝向刀片防护件中的排气室重新引导冷却气流。
19.可选地,多个叶片位于底板和第一挡板之间。
20.可选地,无刷电动马达包括外壳,并且第二挡板在外壳和刀片防护件之间延伸。
21.可选地,第一挡板和第二挡板围绕输出轴定位。
22.可选地,刀片防护件包括排气口,并且冷却气流通过排气口排放到大气中。
23.可选地,马达壳体包括进气口,并且冷却气流通过进气口吸入到马达壳体中。
24.可选地,圆锯还包括位于冷却气流内的印刷电路板。
25.可选地,印刷电路板位于无刷电动马达的轴向端部。
26.可选地,印刷电路板是第一印刷电路板,并且圆锯还包括与第一印刷电路板间隔开并与其平行的第二印刷电路板。
27.通过考虑详细描述和附图,本实用新型的其他方面将变得显而易见。
附图说明
28.图1是根据本实用新型一个实施方式的圆锯的前视透视图。
29.图2是图1的圆锯的另一前视透视图。
30.图3是图1的圆锯的透视图,其中移除了一部分。
31.图4是图1的圆锯的后视透视图,其中移除了一部分。
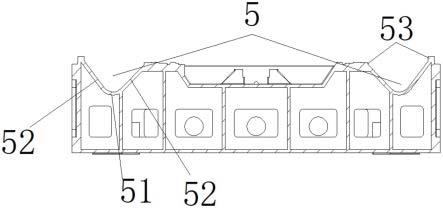
32.图5是沿图1中所示的线5-5截取的图1的圆锯的剖视图。
33.图6是图1的圆锯的内刀片防护件的透视图。
34.图7是图1的圆锯的放大前视透视图,其中移除了马达壳体并示出了第一挡板和第二挡板。
35.图8是图1的圆锯的放大前视透视图,其中移除了马达壳体并示出了电动马达和印刷电路板组件。
36.图9是沿图1中所示的线9-9截取的图1的圆锯的剖视图,其中移除了马达壳体。
37.图10是图1的圆锯的布线示意图。
38.图11是根据另一实施方式的用于图1的圆锯的布线示意图。
具体实施方式
39.在详细解释本实用新型的任何实施方式之前,应当理解,本实用新型的应用不限于在以下描述中阐述或在附图中示出的构造细节和部件布置。本实用新型能够具有其他实施方式,并且能够以各种方式实践或实施。
40.图1示出了电动工具,例如圆锯10。在一些构造和一些方面,圆锯10 是金属切割圆锯10。圆锯10被配置为驱动锯片12(图5),其具有大于约6 英寸的外径。在一些实施方式中,锯片的外径在大约6英寸到大约12英寸的范围内。在其他实施方式中,圆锯片具有大约8英寸的外径。
41.继续参考图1,圆锯10包括马达壳体20、定位在马达壳体20内的电动马达25(图5),以及封闭锯片12的上部的上刀片防护件30。在所示的实施方式中,马达25优选地是无刷直
流(“bldc”)马达。圆锯10还包括从上刀片防护件30向后延伸的后手柄35,以及在一端联接到马达壳体20并且在另一端联接到上刀片防护件30的前手柄40。后手柄35包括激活马达25并驱动锯片12的触发器45,以及接收电池组55的电池插座50。所示的电池组55是具有多个可再充电电池单元(未示出)的电动工具电池组。电池单元可以是锂基或具有任何其它合适的化学物质。
42.在所示的实施方式中,马达25和电池组55一起形成高功率电池供电系统,如于2018年7月25日提交的美国专利申请号16/045,513(美国专利申请公开号2019/0044110)中公开的系统,其全部内容通过引用并入本文。因此,电池组55具有高达约20伏(v)(例如,约18v至约20v)的标称电压和高达约12安培小时(ah)的容量。电池组55和马达25可操作以产生高功率输出—1800瓦(w)至2400w或更高(2.4马力(hp)至3.0hp或更高) 的峰值功率。为了在锯片12负载(即,在工件上进行工作)时实现该峰值功率,通过马达控制器将高电流(例如,100安培(a)或更大)从电池组 55释放到马达25。然而,当锯片12上没有负载时,马达从电池组55汲取大约10a和18a之间的电流。
43.继续参考图1,锯10还包括靴形件(shoe)60,其连接到上刀片防护件 30以用于将圆锯10支撑在工件上。靴形件60大体垂直于由锯片12限定的平面定向,并且其将锯片12的上部与下部分开。靴形件60包括锯片12穿过的槽65(图4)。靴形件60的底表面可与工件的表面接合并且是平滑的,以允许靴形件在锯片12切割工件时滑过工件的表面。靴形件60可相对于上刀片防护件30枢转以便调节锯片12的切割深度。并且,在一些实施方式中,靴形件60也可枢转以调节锯片12的斜角。圆锯10还包括下刀片防护件70,其可枢转地附接到上刀片防护件30,以选择性地覆盖锯片12在靴形件60 下方的下部,使得至多只有锯片12的前部的一小部分被暴露。在切割期间,下刀片防护件70接合工件,并且锯10的向前位移导致下刀片防护件枢转,以露出锯片12的更多部分以切割工件。
44.圆锯10还包括联接到上刀片防护件30的切屑收集盖75,在切割操作期间,切屑和其他碎屑积聚在切屑收集盖75中。盖75包括快速释放闩锁80,以便于在不使用工具的情况下从上刀片防护件30移除盖75,以清空盖75 中的碎屑。
45.如图3至图5所示,上刀片防护件30和内刀片防护件125(图3)的组合限定了刀片室85(图4),锯片12位于刀片室85中。上刀片防护件30包括弧形管道90(图4),该管道90被内刀片防护件125部分地覆盖。管道90 包括靠近锯片12的前边缘的开口95(图4),碎屑可通过该开口95进入管道90。管道90终止于排屑口100,排屑口100与盖75的内部连通(图5)。盖75包括内壁105和外壁110,内壁105和外壁110在它们之间限定与排屑口100连通的开口115。内壁105和外壁110限定储存容器120,在切割操作期间来自工件的切屑和其他碎屑积聚在该储存容器120中。
46.参考图3和图5,内刀片防护件125位于上刀片防护件30和盖75的内壁105之间。内刀片防护件125包括位于排屑口100和盖开口115之间的开口130,以连通管道90和储存容器120。内刀片防护件125包括多个肋132,其桥接内刀片防护件125和盖75的内壁105之间的间隙,以防止切屑在从刀片室85移到储存容器120时掉落。如图6所示,在其他实施方式中,内刀片防护件125包括减少翘曲的径向肋135和延伸穿过内刀片防护件125的水平肋140。水平肋140桥接内刀片防护件125和盖75的内壁105之间的间隙,以防止切屑在从刀片室85移到储存容器120时掉落。
47.锯片12的旋转在上刀片防护件30的刀片室85内引起气流,其使切屑和碎屑径向并周向地加速离开锯片12并进入导管90的开口95。在刀片室 85内产生的气流将来自工件的切屑和碎屑带动通过管道90并通过排屑口 100、内刀片防护件125的开口130、盖75的开口115,并进入储存容器120。然后,在刀片室85内产生的气流通过随着锯片12通过工具的底部离开圆锯 10。
48.参考图5,马达25包括马达外壳145、支撑在马达外壳145内的定子150、支撑在马达外壳145内的转子155、从马达外壳145延伸的马达轴160,以及定位在马达轴160上以用于与马达轴160一起旋转的风扇165。马达外壳 145包括入口端170和与入口端170相对的出口端175。入口端170限定通往马达外壳145的内部的开口。出口端175限定邻近风扇165的开口。风扇 165包括底板176和从底板延伸的多个叶片178(图7)。
49.在所示的实施方式中,转子155是内部永磁体(ipm)型转子(又名埋入型磁铁转子)。这样,转子155包括多个永磁体(例如,n45h磁体)。定子 150包括具有以三相并联三角形配置连接的六个线圈的定子绕组。线圈可以替代配置(即,串联、三角形等)连接。定子绕组包括直径为1.5mm并围绕定子150延伸11.5匝的导线。
50.继续参考图5,小齿轮180联接到马达轴160。在所示的实施方式中,小齿轮180与马达轴160集成一体。在其他实施方式中,小齿轮180可以焊接或以其他方式联接到马达轴160。小齿轮180与驱动齿轮185接合 (interface),驱动齿轮185具有旋转轴线186(即,驱动轴线),其平行于马达轴160和小齿轮180的旋转轴线161(即马达旋转轴线)。在所示的实施方式中,轴线186也是锯片12的旋转轴线。驱动齿轮185联接到心轴190 以与其共同旋转。在所示的实施方式中,心轴190是5/8”心轴并且心轴190 压配合到驱动齿轮185中。在其他实施方式中,心轴190可以包括不同的尺寸。心轴190延伸到刀片室85中并且包括两个凸缘195,锯片12夹持在两个凸缘195之间。马达25被配置为以19000rpm和20000rpm之间的空载速度(即,不切入工件)旋转马达轴160。小齿轮180上的齿与驱动齿轮185 上的齿的比为37:7。因此,驱动齿轮185和心轴190能够使锯片12至少在 3500rpm和4000rpm的范围内旋转。
51.参考图5和图7,马达25还包括第一挡板200和第二挡板205,第一挡板200邻近风扇165并与风扇165的底板176成面对关系,第二挡板205定位在风扇165的径向外侧。第一挡板200和第二挡板205均与马达轴160轴向对准。换句话说,第一挡板200和第二挡板205围绕马达轴160和轴线161 定位。第一挡板200位于马达外壳145内。具体地,第一挡板200位于风扇 165和定子150之间。第一挡板200为大体圆形并包括平坦的外周。第二挡板205为大体圆形但具有非平坦的外周。在所示的实施方式中,第二挡板205 定位在上刀片防护件30和马达外壳145之间,并且至少部分地定位在马达壳体20内。
52.参考图8,圆锯10还包括控制印刷电路板(pcb)组件300、电力pcb 组件304和固态断路(“ssd”)pcb组件308。控制pcb组件300包括定位在安装件316内的电路板312,以及安装在电路板312上的控制器320(即,控制单元、微处理器等)。控制pcb组件300安装在马达外壳145上。更具体地,安装件316通过例如紧固件固定到马达外壳145。电力pcb组件304 在马达外壳145的入口端170附近定位在马达25的轴向端。电力pcb组件 304包括热联接到散热器328的电路板324,以及安装在电路板324上的多个电力开关332(例如,场效应晶体管(fet)、金属氧化物半导体场效应晶体管(mosfet)、绝缘栅双极型晶体管(igbt)等)。马达25的操作由控制器320控制,控制器320可以至少包括电子处理器和存储指令的存储器,这些指令由
电子处理器执行以执行控制器320的功能。例如,在操作期间,控制器320从监测转子155的旋转位置的转子位置传感器(例如,霍尔传感器或旋转编码器)接收转子位置信息,并选择性地控制多个电力开关332以使定子150的线圈通电以驱动转子155。例如,多个电力开关332可以具有六晶体管桥式布置,其具有三个高边晶体管和三个低边晶体管。控制器320可以在转子155旋转时使用脉冲宽度调制(pwm)信号顺序地启用晶体管对,每个晶体管对包括一个高边晶体管和一个低边晶体管。例如,当控制器320 检测到转子155在旋转期间到达特定角位置时,控制器320进而激励下一个晶体管对以继续使用定子150的激励线圈产生磁场,其驱动转子155进一步旋转。
53.ssd pcb组件308包括接收在安装件220内的电路板309,该安装件220 将ssd pcb组件308与电力pcb组件304轴向隔开。换句话说,ssd pcb组件308与电力pcb组件304隔开并与其平行。ssd pcb组件也在马达外壳145 的入口端170附近定位在马达25的轴向端。如图8和图9所示,安装件220 包括三个支腿222,其联接到马达外壳145上的柱224。安装件220通过紧固件226联接到马达外壳145。电力pcb组件304位于安装件220的支腿222 和马达外壳145之间。紧固件226将电力pcb组件304固定在安装件220的支腿222和马达外壳145之间。如图9所示,马达外壳145通过附加的紧固件228联接到上刀片防护件30。马达外壳145的与安装件220相对的边缘 229(图9)与刀片防护件30邻接。第二挡板205与马达外壳145的一部分 147重叠,从而覆盖紧固件228。在所示的实施方式中,第二挡板205在马达外壳145和刀片防护件30之间延伸(图8)。
54.参考图10,示出了用于诸如圆锯10的电动工具的第一布线示意图,其中ssd pcb组件308与电力pcb组件304和控制pcb组件300电连通。ssd pcb 组件308包括固态断路开关336(图8),其设置在电池组55和电力pcb组件304之间。具体地,ssd pcb组件308通过连接338电联接到电池组55 的正极端子(b ),并且还通过连接339电联接到电力pcb组件304。固态断路开关336是基于半导体的。当固态断路开关336闭合时,固态断路开关336 允许电流流过电力pcb组件304,并且当固态断路开关336断开时,固态断路开关336防止电流流到电力pcb组件304。固态断路开关336为电力开关 332提供欠压保护,并且还可以在控制器320的故障状态下防止电流流过电力开关332。
55.参考图11,示出了用于诸如圆锯10的电动工具的替代性布线示意图。作为一个具体示例,图11的布线示意图适用于圆锯10作为金属切削锯的实施方式。图11的替代性布线图类似于图10的布线图,它们的区别如下所述。例如,图10的微动开关未包括在图11的布线示意图中。此外,图11的布线示意图包括负载指示灯337(也被称为状态指示器(eco-indicator))。负载指示灯337被配置为当圆锯10过载时警告用户。在一些实施方式中,负载指示灯337位于工具壳体(例如,马达壳体20,后手柄35等)上,其在锯10的操作期间位于用户视线内。负载指示灯337被配置为指示锯10在操作期间正在使用的电量(即,从电池组55汲取的电流量)。例如,控制板300 被配置为检测从电池组55汲取的电流量(例如,使用电流感测电阻器)并驱动负载指示灯337以向用户实时指示汲取的电流量。在一些实施方式中,负载指示灯337包括五个发光二极管(led)条,其分布在用于操作锯10的被分割为多个性能区域的性能图。这样,当用户操作锯时,led条基于锯10 的系统性能发光(例如,汲取更大的电流,更多个led条发光)。因此,用户被指导以实现并保持锯10的最佳或改进的性能。这样的负载指示灯(即,状态指示器)的另外的公开内容在于2019年2月11日提交的美国专利申
请号16/272,182中找到,其全部内容通过引用并入本文。在一些实施方式中,工作灯和负载指示灯都包括在内。在其它实施方式中,工作灯被负载指示灯替代。
56.更具体地,固态断路开关336由控制器320控制(即,断开和闭合)。例如,ssd pcb组件308可以包括从控制器320接收输入340的逻辑电路(未示出)。在一些实施方式中,ssd pcb组件308还可以包括来自触发器45的输入,并且固态断路开关336可以闭合以仅当来自控制器320和触发器45 的两个输入都处于逻辑高值时才允许放电电流流过。也就是说,固态断路开关336可以仅在触发器45被致动、控制器320在操作并且控制器320指示圆锯10中没有检测到故障时才闭合。因此,固态断路开关336可以在任一输入为低时断开。例如,固态断路开关336可以在触发器45未被致动时、控制器320发生故障时,或控制器320指示圆锯10中的故障状态时防止放电电流通过。在替代实施方式中,逻辑完全在控制pcb组件300上执行,并且控制器320直接向固态断路开关336提供断开或闭合信号。
57.在一些实施方式中,当马达控制器320确定所有电力开关332都在操作时,控制器320允许圆锯10的操作。例如,控制器320继续向固态断路开关336提供信号(例如,逻辑高信号)以允许圆锯10的正常操作。当控制器320确定至少一个电力开关332发生故障时,控制器320停用圆锯10。控制器320可以暂时或永久停用圆锯10。例如,控制器320向固态断路开关 336提供信号(例如,低信号),以防止放电电流流到电力开关332。
58.参考图2,马达壳体20包括位于其远端上的进气口225、230,并且刀片防护件30包括排气口235、240,其与形成在刀片防护件30内的排气室 250(图5)流体连通。在一些实施方式中,过滤器可以在进气口225、230 附近定位在马达壳体20中,以防止碎屑进入马达壳体20。排气口235、240 定位在排气室250的下游,而排气室250又定位在风扇165的下游。
59.参考图5,在所示的实施方式中,圆锯10包括延伸通过马达壳体20的冷却气流245。冷却气流245由风扇165通过第一进气口225和第二进气口 230吸入马达壳体20的内部。然后,冷却气流245经过ssd pcb组件308 和电力pcb组件304并通过入口端170进入马达外壳145,以冷却定子150 和转子155。当冷却气流245经过ssd pcb组件308和电力pcb组件304时,它冷却电子设备(即,电力开关332和固态断路开关336)。在通过定子150 和转子155之后,第一挡板200朝向第二挡板205径向引导冷却气流245。第二挡板205沿轴向方向(即,沿平行于马达轴160的旋转轴线161的方向) 朝向上刀片防护件30的排气室250重新引导冷却气流245。在一些实施方式中,冷却气流245的一部分不会立即进入马达外壳145,而是首先冷却安装在马达外壳145的顶部上的附加电子设备。然后,冷却气流245通过排气口 235、240排放到大气中。
60.在风扇165附近提供平坦的环形挡板200(即,第一挡板)有利地增加马达壳体20内的冷却气流245,以进一步冷却圆锯10的马达25和其他电子部件。例如,如下表1所示,在使用第一挡板200和第二挡板205时的冷却气流245的体积流速(以每分钟立方英尺(cfm)测量)大于在仅使用第二挡板205时的体积流速。具体地,在存在第一挡板200和第二挡板205的情况下进入进气口225、230的冷却气流245为11.5cfm。此外,在存在第一挡板200和第二挡板205的情况下离开第一排气口235和第二排气口240的冷却气流245分别为5.8和5.7cfm。
[0061][0062]
表1
[0063]
尽管已经参照以上某些实施方式详细描述了本实用新型,但是在所描述的本实用新型的一个或多个独立方面的范围和精神内存在变化和修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。