1.本发明涉及智能物流小车技术领域,具体涉及一种全自动智能化仓储物流运输小车。
背景技术:
2.目前,仓储物流自动化和智能化的发展趋势越来越明显。智能化物流小车是一种由微控制器控制的通过机械结构相互配合完成循迹、扫码识别、抓取物料、避障及放置物料等一系列操作的自动化小车,其原理是通过微控制器控制小车前进避障并控制机械臂抓取指定物料并放置在车上后前往规定区域将物料放置在指定区域,从而实现自动化智能化运送物料,节省人力提高效率。
3.现有的物流小车一般分为两种:一种是货架式小车,以货物架组合万向轮,起到运送货物的作用。这种物料小车的上料与下料都需要人手动搬运,且需要人力推动前行,费时费力,造成人力资源极大的浪费。另一种是智能搬运小车,可以根据地上的磁钉来进行循迹定位,运送货物,但缺点是车体只可用来放置物料,而物料的抓取需要其他装置进行辅助,小车只起到搬运的作用,功能单一。因此,急需设计一种全自动智能化仓储物流运输小车。
技术实现要素:
4.本发明的目的在于提供一种全自动智能化仓储物流运输小车,该小车突破了现有单一执行操作的局限性,采用机器视觉实现对指定物体的抓取,并通过自动化控制模块实现了小车的全自动控制,无需任何人工操作,大大提高了作业效率。
5.为实现上述技术目的,本发明提供一种全自动智能化仓储物流运输小车,包括车架、行进机构、导轨机构、传送机构、抓取机构、存放机构及图像获取装置和控制器,所述车架用于固定安装小车的各组成部件,所述行进机构安装于所述车架的底部,用于完成小车整体的全方位移动,所述导轨机构固定于所述车架的顶部,为实现小车抓取目标货物提供可移动调节的轨道,所述传送机构与所述车架连接、并位于导轨机构的下方,所述抓取机构固定在所述传送机构上,且与所述导轨机构的导轨配合连接,能够在所述传送机构的带动下沿着导轨机构移动,用于抓取目标货物,所述存放机构安装在所述车架的下部,用于存放货物,所述图像获取装置固定安装在所述车架的顶部,所述控制器分别与图像获取装置、行进机构、传送机构、抓取机构和存放机构电连接,所述控制器通过对图像获取装置采集到的货物图像信息进行分析处理后得到目标货物应放置在存放机构的对应位置信息,并控制行进机构、传送机构、抓取机构和存放机构同时协调作业将目标货物放置在存货区。
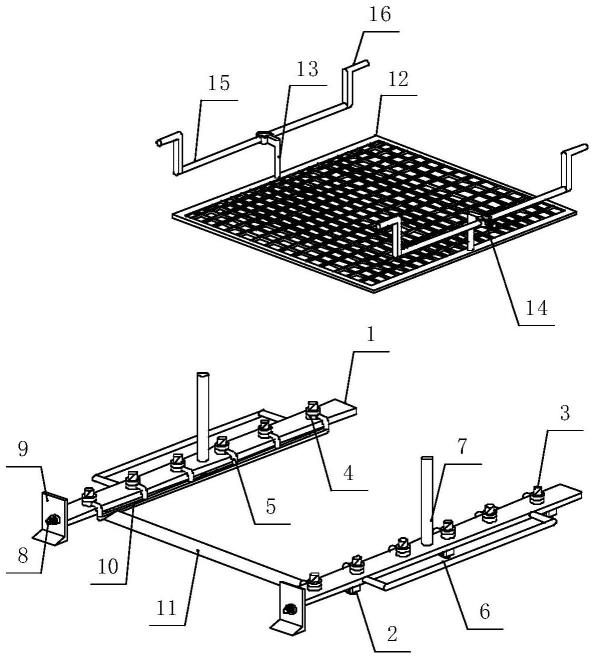
6.进一步地,所述导轨机构为由多段铁轨焊接而成的封闭式轨道,该封闭式轨道两侧的上表面固定连接在所述车架上,其外侧面形成有用于所述抓取机构移动的滑轨工作面。
7.进一步地,所述传送机构包括四个带轮、同步带以及带轮驱动电机,四个所述带轮两两一组、对称安装在位于所述封闭式轨道下面的所述车架上,所述带轮驱动电机安装在
其中一个带轮上,且所述带轮驱动电机与所述控制器电连接,所述同步带同时套设在四个所述带轮的外部,所述抓取机构固定在所述同步带上。
8.进一步地,所述抓取机构包括导向轮、安装座、第一电动推杆、抓手驱动电机及抓手,所述导向轮的滚动面与所述滑轨工作面滑动连接,且所述导向轮的两端转动连接在所述安装座上,所述第一电动推杆固定在所述安装座的底面中间,所述第一电动推杆的另一端与所述抓手驱动电机的壳体连接,所述抓手驱动电机的输出轴通过转轴与所述抓手连接,且所述电动推杆和所述抓手驱动电机与所述控制器电连接。
9.进一步地,所述安装座的中间有一u型槽,所述导向轮设置在该u型槽中,且该u型槽的上表面设有对称的两个支撑片,在所述支撑片的上表面与所述封闭式轨道的下表面之间设有用于防止抓取机构晃动的防摇轮。
10.进一步地,所述第一电动推杆的侧壁上设有固定导向装置,所述固定导向装置由固定块和卡扣组成,所述固定块固定安装在第一电动推杆的侧壁上,所述固定块的外侧表面上开设有用于同步带穿过的卡槽,所述卡扣的两端将所述同步带固定在所述卡槽中。
11.进一步地,所述存放机构包括齿轮齿条组件、连接杆和由l型板组成的至少一组伸缩门,所述齿轮齿条组件由第一齿轮和两个第一齿条组成,所述第一齿轮连接在第一齿轮电机上,所述第一齿轮电机固定在车架上,两个第一齿条分别啮合在所述第一齿轮的两侧,且两个第一齿条分别固定在两个导轨条上,所述第一齿轮电机与所述控制器电连接,通过第一齿轮的转动带动两个第一齿条同时、同速向两个方向运动,使得两个导轨条运动,所述连接杆分别连接在两个导轨条上,所述l型板对称设置在所述连接杆上,且所述l型板的竖直部分螺纹连接在所述连接杆上,其水平部分穿过开设在所述车架的侧板上的槽口,所述l型板的水平部分构成了所述存放机构的伸缩门。
12.进一步地,所述车架的下部、与所述存放机构位置相对应的位置上还设有暂存机构,所述暂存机构包括x型升降台和第二电动推杆,所述x型升降台固定连接在所述车架上,所述第二电动推杆与所述x型升降台的连接轴连接,并且所述第二电动推杆与所述控制器电连接,在控制器的控制下,所述x型升降台能够在所述第二电动推杆的推动下进行升降。
13.进一步地,所述x型升降台上还设有推送机构,所述推送机构包括第二齿轮、第二齿条、齿条平衡条、齿条导轨和突盘,所述第二齿轮安装在第二齿轮电机的输出端,所述第二齿轮电机固定在所述x型升降台上,且所述第二齿轮电机与所述控制器电连接,所述第二齿条与所述第二齿轮啮合,且所述第二齿条安装在齿条导轨上,所述齿条导轨的另一端分别固定在x型升降台的挡板上,所述齿条平衡条安装在与第二齿条对称侧的齿条导轨上,所述突盘的两端分别与所述第二齿条和所述齿条平衡条相连接。
14.进一步地,所述行进机构由四个麦克纳姆轮组成,四个所述麦克纳姆轮分别安装在所述车架底部的四角处,且每个所述麦克纳姆轮均连接有一个控制电机。
15.与现有仓储物流运输小车相比,本发明提供的一种全自动智能化仓储物流运输小车,通过图像获取装置对待抓取的目标货物进行识别,并对采集到的货物图像信息进行分析处理后得到目标货物应放置在存放机构的对应位置信息,通过控制器协调控制传送机构带动抓取机构在导轨机构上进行移动调整到目标货物的位置后进行抓取,并将抓取上来的货物放置在存放机构上,之后小车通过行进机构移动到指定位置,并通过存放机构上的伸缩门将货物卸载在待存放区域。本发明采用机器视觉可以识别不同颜色、不同形状的目标
货物,实现了仓储物流运输小车的全自动智能化抓取及卸货,这个过程无需任何人工操作,大大提高了仓储物流的运输作业效率。
附图说明
16.图1是本发明一种全自动智能化仓储物流运输小车的整体结构示意图;
17.图2是本发明所述导轨机构的局部视图;
18.图3是本发明所述抓取机构的结构示意图;
19.图4是本发明所述抓取机构与导轨机构的连接方式示意图;
20.图5是本发明所述存放机构的结构示意图;
21.图6是本发明所述存放机构中的齿轮齿条的结构示意图;
22.图7是本发明所述暂存机构的结构示意图;
23.图8是本发明所述推送机构的结构示意图。
24.图中所示:
25.1-车架;
26.2-行进机构;
27.3-导轨机构,31-滑轨工作面;
28.4-传送机构,41-带轮,42-同步带,43-带轮驱动电机;
29.5-抓取机构,51-导向轮,52-安装座,521-u型槽,522-支撑片,523-防摇轮,53-第一电动推杆,531-固定块,532-卡扣,54-抓手驱动电机,55-抓手,551-第一抓手,552-第二抓手;
30.6-存放机构,61-第一齿轮,62-第一齿条,63-连接杆,64-l型板,65-第一齿轮电机,66-导轨条;
31.7-暂存机构,71-x型升降台,72-第二电动推杆,73-连接轴;
32.8-推送机构,81-第二齿轮,82-第二齿条,83-齿条平衡条,84-齿条导轨,85-突盘,86-第二齿轮电机。
具体实施方式
33.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
34.如图1所示,本发明提供一种全自动智能化仓储物流运输小车,它包括车架1、行进机构2、导轨机构3、传送机构4、抓取机构5、存放机构6及图像获取装置和控制器,所述行进机构2安装于所述车架1的底部,用于完成小车整体的全方位移动;所述导轨机构3固定于所述车架1的顶部,为实现小车抓取目标货物提供可移动调节的轨道;所述传送机构4与所述车架1连接、并位于所述导轨机构3的下方;所述抓取机构5固定在所述传送机构4上,且与所述导轨机构3的导轨配合连接,能够在所述传送机构4的带动下沿着导轨机构3移动,用于抓取目标货物;所述存放机构6安装在所述车架1的下部,用于存放货物;所述图像获取装置固定安装在所述车架1的顶部,所述控制器分别与图像获取装置、行进机构2、传送机构4、抓取机构5和存放机构6电连接,所述控制器通过对图像获取装置采集到的货物图像信息进行分
析处理后得到目标货物应放置在存放机构的对应位置信息,并控制行进机构、传送机构、抓取机构和存放机构同时协调作业将目标货物放置在存货区。
35.上述技术方案通过行进机构2实现小车的全方位移动,当小车移动到指定位置时,通过图像获取装置对待抓取的目标获取进行标识识别,这些标识包括货物的颜色、形状等特征,判断需要抓取的目标货物,将信号反馈给控制器,控制器控制传送机构4带动抓取机构5在导轨机构3上运动,当抓取机构5移动至目标货物的正上方时,控制器控制抓取机构5向下抓取货物,并将货物放置在存放机构6上,同时传送机构4继续运动,带动剩余的抓取机构5继续抓取货物,当存放机构6和抓取机构5上均装满货物后,控制器控制行进机构2使得小车沿着循迹移动到指定的卸货区域,通过存放机构6上的自动伸缩门将货物放置在存货区,即完成了自动运输功能。
36.其中,为了更好地获取目标货物的特征,所述图像获取装置采用摄像头,所述摄像头优选地安装在所述车架1的最顶部,以便于识别目标货物。所述控制器采用树莓派作为上位机,将摄像头、抓取机构5和传送机构4与树莓派上位机电连接;由stm32f4作为下位机,并将行进机构2、暂存机构7、推送机构8和存放机构6,并且将下位机通过串行接口与上位机通信连接,如此,所述控制器通过对图像获取装置采集到的货物图像信息进行分析处理后得到目标货物应放置在存放机构的对应位置信息,并将该对应的位置信息传输给下位机,由下位机控制行进机构2、暂存机构7、推送机构8和存放机构6同时协调作业将目标货物放置在存货区,控制完成小车从目标识别、抓取、转运及卸货的自动化全过程,实现整机的无人操作。
37.在一个具体的实施例中,所述车架1是由20mm*20mm的铝型材搭建组成的框架结构,整车长1300mm,宽900mm。在实际应用中,组成车架1的材料和尺寸、外形可根据实际需要灵活选择,但其选择应当满足搭载各组成部件的承重。
38.在一个具体的实施例中,所述行进机构2由四个麦克纳姆轮组成,四个所述麦克纳姆轮分别安装在所述车架1底部的四角处,且每个所述麦克纳姆轮上均连接有一个控制电机进行单独控制,可以实现纵向及转向的移动。
39.优选的,在小车的底部安装有4个红外循迹传感器,当红外循迹传感器照到黑线时输出低电平,返回数值为0,照到白色地面时输出高电平,返回数值为1.根据对称两组红外循迹传感器可以有效的判断小车是否走歪,如果走歪可以自动调节不同麦克纳姆轮的速度,使之沿着黑线行走。
40.在一个具体的实施例中,结合图1和2所示,所述导轨机构3为由多段铁轨焊接而成的封闭式轨道,该封闭式轨道两侧的上表面固定连接在所述车架1上,其外侧面形成有用于所述抓取机构5移动的滑轨工作面31。
41.由于物体在导轨上移动要求有较高的传动准确性和平稳性,我们优先选用同步带和带轮组合的形式来完成传送动作,并且同步带还具有传动效率高的优点,选用的电机功率较小即可,便于减轻整体装置的重量。具体的,所述传送机构4包括四个带轮41、同步带42以及带轮驱动电机43,四个所述带轮41两两一组、对称安装在位于所述封闭式轨道下面的所述车架1上,所述带轮驱动电机43安装在其中一个带轮41上,且所述带轮驱动电机43与所述控制器电连接,所述同步带42同时套设在四个所述带轮41的外部,所述抓取机构5固定在所述同步带42上。
42.在一个具体的实施例中,如图3所示,所述抓取机构5包括导向轮51、安装座52、第一电动推杆53、抓手驱动电机54及抓手55,所述导向轮51的滚动面与所述滑轨工作面31滑动连接,且所述导向轮51的两端转动连接在所述安装座52上,所述第一电动推杆53固定在所述安装座52的底面中间,所述第一电动推杆53的另一端与所述抓手驱动电机54的壳体连接,所述抓手驱动电机54的输出轴通过转轴与所述抓手55连接,且所述第一电动推杆53和所述抓手驱动电机54与所述控制器电连接。
43.优选的,所述抓手55由第一抓手551和第二抓手552组成,第一抓手551和第二抓手552镜像设置,且第一抓手551的一端部为齿轮结构,该齿轮转动连接在与抓手驱动电机54连接的转轴上,第二抓手552一端部的边缘为与第一抓手551齿轮结构相啮合的锯齿状,如此设置,当抓手驱动电机54转动时,带动转轴转动,使得第一抓手551转动,从而带动第二抓手552的转动,第一抓手551和第二抓手552的转动实现了抓手55的打开与闭合,从而完成抓取货物的动作。
44.优选的,所述安装座52的中间有一u型槽521,所述导向轮51设置在该u型槽521中,且该u型槽521的上表面设有对称的两个支撑片522,在所述支撑片522的上表面与所述封闭式轨道的下表面之间设有用于防止抓取机构5晃动的防摇轮523。
45.优选的,如图4所示,所述第一电动推杆53的侧壁上设有固定导向装置,所述固定导向装置由固定块531和卡扣532组成,所述固定块531固定安装在第一电动推杆53的侧壁上,所述固定块531的外侧表面上开设有用于同步带42穿过的卡槽,所述卡扣532的两端将所述同步带42固定在所述卡槽中。
46.上述导轨机构3、传送机构4和抓取机构5的工作原理是:通过控制器控制开启带轮驱动电机43,带动带轮41转动,从而带动同步带42运动,而抓取机构5的数量有多个,并且通过固定导向装置固定在同步带42上,这样抓取机构5就随着同步带42的运动而运动,当抓取机构5运动到目标货物的正上方时,通过控制器控制启动第一电动推杆53使得抓手55向下,同时通过控制器控制启动抓手驱动电机54,使得第一抓手551和第二抓手552张开抓取货物,抓取货物后第一电动推杆53退回、升起抓手55,之后同步带42带动抓取机构5继续运动,完成一次抓取动作。在传送机构4带动抓取机构5运动的过程中,导向轮51沿着导轨机构3的滑轨工作面31滚动,防摇轮523的设置可以防止抓取机构5在运动过程中发生晃动,同时固定导向装置一方面起到了固定抓取机构5的作用,另一方面对抓取机构5的移动起到了导向作用,采用这种结构既可以解决导向轮51与滑轨工作面31之间由于存在缝隙容易产生相对滑动的问题,又使封闭式铁轨成为承重结构,减小对同步带42的损坏。
47.在一个具体的实施例中,如图5和图6所示,所述存放机构6包括齿轮齿条组件、连接杆63和由l型板64组成的至少一组伸缩门,所述齿轮齿条组件由第一齿轮61和两个第一齿条62组成,所述第一齿轮61连接在第一齿轮电机上65,所述第一齿轮电机65固定在车架1上,两个第一齿条62分别啮合在所述第一齿轮61的两侧,且两个第一齿条62分别固定在两个导轨条66上,所述第一齿轮电机65与所述控制器电连接,通过第一齿轮61的转动带动两个第一齿条62同时、同速向两个方向运动,使得两个导轨条66运动,所述连接杆63分别连接在两个导轨条66上,所述l型板64对称设置在所述连接杆63上,且所述l型板64的竖直部分螺纹连接在所述连接杆63上,其水平部分穿过开设在所述车架1的侧板上的槽口,所述l型板64的水平部分构成了所述存放机构6的伸缩门。
48.上述为一个存放机构6的结构组成,在实际使用中,存放机构6的数量可以是多个,多个存放机构6的连接杆63均连接在导轨条66上,这样多个存放机构6的伸缩门就可以实现同时打开和关闭,这个流程由第一齿轮电机65一个电机就可以完成,减轻了整机的重量。
49.优选的,每个存放机构6中均设置两道伸缩门,即设置两组l型板64,一组设置在存放机构6的下部,另一组设置在存放机构6的上部,且位于上面的一组l型板64的水平部分的板长要小于位于下面的一组l型板64的水平部分的板长,如此,当第一齿轮电机65控制连接杆63打开时,位于上面一组的l型板64之间的空隙就会比下面一组l型板64之间的空隙大,则货物从上面一层掉到下面一层,再从下面一层卸货到指定区域,此结构能够依次进行装货、卸货,使得小车的整体运输能力得到提高。
50.在一个具体的实施例中,结合图1和图7所示,所述车架1的下部、与所述存放机构6位置相对应的位置上还设有暂存机构7,所述暂存机构7包括x型升降台71和第二电动推杆72,所述x型升降台71固定连接在所述车架1上,所述第二电动推杆72与所述x型升降台71的连接轴73连接,并且所述第二电动推杆72与所述控制器电连接,在控制器的控制下,所述x型升降台71能够在所述第二电动推杆72的推动下进行升降。
51.在一个具体的实施例中,如图8所示,所述x型升降台71上还设有推送机构8,所述推送机构8包括第二齿轮81、第二齿条82、齿条平衡条83、齿条导轨84和突盘85,所述第二齿轮81安装在第二齿轮电机86的输出端,所述第二齿轮电机固定86在所述x型升降台71上,且所述第二齿轮电机86与所述控制器电连接,所述第二齿条82与所述第二齿轮81啮合,且所述第二齿条82安装在齿条导轨84上,所述齿条导轨84的另一端分别固定在x型升降台71的挡板上,所述齿条平衡条83安装在与第二齿条82对称侧的齿条导轨84上,所述突盘85的两端分别与所述第二齿条82和所述齿条平衡条83相连接。
52.上述暂存机构7用于暂时存放货物,货物由抓取机构5抓取并在传送机构4的带动下将货物转运至暂存机构7上方时,抓取机构5放开将货物暂存至x型升降台71上,使得抓取机构5可以回到抓取区域抓取另外的货物,为实现小车的各部件同步协调运动打下基础。此处设置的暂存机构7和推送机构8可以实现不同货物的上下层码垛,比如红色的牛奶箱和蓝色的牛奶箱,我们可通过设置控制器的控制程序使抓取机构5先进行红色牛奶箱的抓取,抓取后放置在暂存机构7的x型升降台71上,x型升降台71通过第二电动推杆72抬升高度,当升至与存放机构6的高度相同时,使用推送机构8的突盘85将红色牛奶箱推送至存放机构6上,再通过打开存放机构6的伸缩门使得红色牛奶箱被送入存放机构6的下层,同时抓取机构5抓取蓝色的牛奶箱放置在暂存机构7上,再通过推送机构8推送至存放机构6上,至此完成要求的红色牛奶箱码垛在下面、蓝色牛奶箱码垛在上面的要求。
53.需要说明的是,突盘85的中心线要高出x升降台71平面75mm,此时突盘85的中心线恰好对准牛奶箱中心线,使牛奶箱平稳地被推送至暂存机构7上。所述推送机构8是由第二齿轮电机86控制第二齿轮81转动,通过第二齿轮81与第二齿条82啮合使第二齿条82沿着齿条导轨84运动,使固定在第二齿条82末端的突盘85实现水平运动,从而将牛奶箱推送至存放机构6中。
54.综上,本发明提供的一种全自动智能化仓储物流运输小车,首先将小车放置在起点位置,然后打开图像获取装置对标识的目标货物进行识别,识别的结果传送至控制器中,再通过控制器控制传送机构4运动,带动抓取机构5进行移动,当移动至目标货物正上方时,
控制器控制抓取机构5向下对目标获取进行抓取,抓取后将货物放置在暂存机构7上,再通过推送机构8推送至存放机构6上,同时控制器控制传送机构4继续带动抓取机构5运动进行再次抓取,当存放机构6和/或暂存机构7和/或抓取机构5上装满或部分装满货物,小车通过行进机构2移动至指定位置后放下货物,完成工作。本发明的仓储物流运输小车实现了从抓取、转运到卸货的全过程自动化,全程无需任何人工,大大提高了作业效率。
55.以上所述本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。