1.本发明涉及通过振动去除液滴等的振动装置和振动控制方法。
背景技术:
2.在专利文献1中公开了用于将附着于透镜的附着物去除的车载光学传感器盖。在专利文献1中记载的车载光学传感器盖具备使透镜或玻璃盖进行超声波振动动作的超声波振动部件。超声波振动部件在由清洗喷嘴进行清洗动作中途或进行后,使透镜或玻璃盖进行超声波振动。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2011-244417号公报
技术实现要素:
6.发明要解决的问题
7.在专利文献1的装置中,在提高液滴的去除性能这一点上仍有改善的余地。
8.用于解决问题的方案
9.本发明的一个方案的振动装置具备:
10.透光体;以及
11.振动部,其使所述透光体以1.5
×
105m/s2以上且8.0
×
105m/s2以下的振动加速度振动。
12.本发明的一个方案的振动控制方法是具备透光体和使所述透光体振动的振动部的振动装置的振动控制方法,其中,该振动控制方法包括利用所述振动部使所述透光体以1.5
×
105m/s2以上且8.0
×
105m/s2以下的振动加速度振动的步骤。
13.发明的效果
14.根据本发明,能够提供一种提高液滴的去除性能的振动装置和振动控制方法。
附图说明
15.图1是表示具备本发明的实施方式1的振动装置的摄像单元的一例的概略立体图。
16.图2是图1的摄像单元的概略剖视图。
17.图3是本发明的实施方式1的振动装置的一例的概略立体图。
18.图4是图3的振动装置的分解立体图。
19.图5是图3的振动装置的概略剖视图。
20.图6是本发明的实施方式1的振动装置的一例的框图。
21.图7是说明滑落角与附着能量的关系的一例的概略图。
22.图8是表示滑落角与加速度的关系的一例的概略图。
23.图9是表示滑落角与施加电压的关系的一例的概略图。
24.图10是本发明的实施方式1的振动控制方法的一例的流程图。
25.图11是表示本发明的实施方式1的振动装置的动作的一例的概略图。
26.图12是本发明的实施方式1的振动装置的一例的概略剖视图。
27.图13是本发明的实施方式1的变形例的振动装置的概略剖视图。
28.图14是表示具备本发明的实施方式2的振动装置的摄像单元的一例的概略立体图。
29.图15是图14的摄像单元的概略剖视图。
30.图16是本发明的实施方式2的振动装置的一例的框图。
31.图17是本发明的实施方式2的振动控制方法的一例的流程图。
32.图18是表示本发明的实施方式2的振动装置的动作的一例的概略图。
33.图19是表示具备本发明的实施方式3的振动装置的摄像单元的一例的概略剖视图。
34.图20是本发明的实施方式3的振动装置的一例的框图。
35.图21是本发明的实施方式3的振动控制方法的一例的流程图。
36.图22是表示本发明的实施方式3的振动装置的动作的一例的概略图。
37.图23是本发明的实施方式4的振动装置的一例的概略剖视图。
38.图24是防水涂层的一例的概略图。
39.图25是本发明的实施方式5的振动装置的一例的概略剖视图。
40.图26是本发明的实施方式5的振动装置的一例的框图。
41.图27是本发明的实施方式5的振动控制方法的一例的流程图。
42.图28是表示本发明的实施方式5的振动装置的动作的一例的概略图。
43.图29是本发明的实施方式5的变形例的振动控制方法的一例的流程图。
44.图30是本发明的实施方式6的振动控制方法的一例的流程图。
45.图31是表示本发明的实施方式6的振动装置的动作的一例的概略图。
46.图32是表示图30的振动控制方法的液滴的运动的一例的概略图。
47.图33是表示图30的振动控制方法的液滴的运动的一例的概略图。
48.图34是表示滑落角与加速度的关系的一例的概略图。
49.图35是表示滑落角与施加电压的关系的一例的概略图。
50.图36是本发明的实施方式6的变形例的振动控制方法的一例的流程图。
51.图37是表示实施例1和比较例1的涂层磨损时间的图表。
52.图38是表示实施例2和比较例2的泥水去除率的图表。
53.图39是表示实施例3和比较例3的清洗液的使用量的图表。
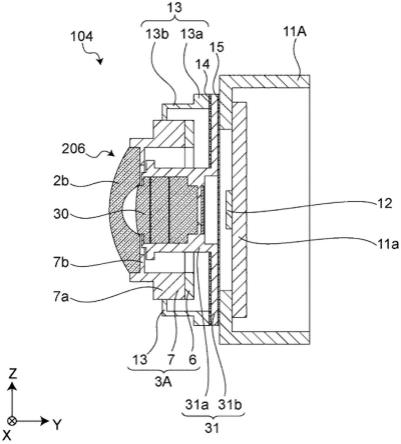
54.图40是表示具备本发明的实施方式7的振动装置的摄像单元的一例的概略立体图。
55.图41是图40的摄像单元的分解立体图。
56.图42是图40的摄像单元的概略剖视图。
57.图43是表示本发明的实施方式7的摄像单元的振动分析的模拟结果的一例的图。
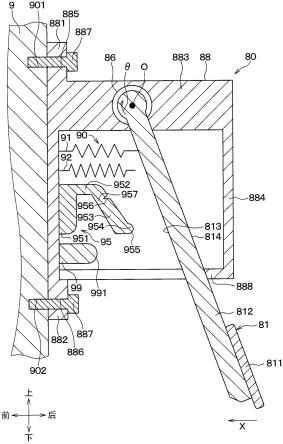
58.图44是振动装置的一例的概略剖视图。
59.图45是振动装置的另一例的概略剖视图。
60.图46是本发明的实施方式7的变形例的振动装置的概略剖视图。
61.图47是表示图46的振动装置的振动分析的模拟结果的一例的图。
具体实施方式
62.(完成本发明的背景)
63.在专利文献1中记载的车载光学传感器盖具有振动机构,该振动机构包括在照相机盖的壳体中通过产生超声波或低频而使玻璃盖振动的压电元件和电极。在专利文献1中记载的车载光学传感器盖在清洗液从清洗喷嘴的喷射口朝向玻璃盖的玻璃面喷射中途或喷射后,利用振动机构使玻璃盖振动。
64.然而,在专利文献1所记载的车载光学传感器盖中,从液滴的去除的观点来看仍有改善的余地。在专利文献1所记载的车载光学传感器盖中,当使作为附着有液滴的玻璃盖的透光体振动时,有时液滴由于振动而持续停留在透光体上,因此,在专利文献1所记载的车载光学传感器盖中,存在难以将附着于透光体的液滴去除的问题。
65.另外,在专利文献1所记载的车载光学传感器盖中,难以将含有附着于透光体的异物的液滴去除。含有异物的液滴例如是指泥水。泥水与雨水等比较不含有异物的液滴相比,容易停留在透光体上。因此,存在即使在用清洗液清洗了透光体的情况下也难以将泥水从透光体去除的问题。
66.这些问题是本发明的发明人发现的新问题。
67.本发明的发明人为了解决这些问题而进行了认真研究,结果发现,当改变使透光体振动的振动加速度时,附着于透光体的液滴的滑落角变化。
68.因此,本发明的发明人发现了控制使透光体振动的振动加速度的结构,而完成了以下的发明。
69.本发明的一个方式的振动装置具备:
70.透光体;以及
71.振动部,其使所述透光体以1.5
×
105m/s2以上且8.0
×
105m/s2以下的振动加速度振动。
72.根据这样的结构,能够提高液滴的去除性能。
73.也可以是,所述振动部使所述透光体以3.5
×
105m/s2以上且5.5
×
105m/s2以下的振动加速度振动。
74.根据这样的结构,能够进一步提高液滴的去除性能。
75.也可以是,所述振动装置还具备:
76.控制部,其控制所述振动部的所述振动加速度。
77.根据这样的结构,能够容易地控制振动加速度。
78.也可以是,所述振动部具有压电元件,
79.所述控制部将施加于所述压电元件的电压的值控制在2vp-p以上且15vp-p以下。
80.根据这样的结构,能够更容易地控制振动加速度。
81.也可以是,所述振动部具有配置于所述压电元件与所述透光体之间的振动体,
82.所述压电元件具有圆环板状,
83.所述振动体具有圆筒形状,
84.所述透光体具有圆板形状或圆顶形状。
85.根据这样的结构,能够进一步提高液滴的去除性能。
86.也可以是,所述控制部具有:
87.使所述透光体以8.1
×
105m/s2以上且1.7
×
106m/s2以下的振动加速度振动的第1振动模式;以及
88.使所述透光体以1.5
×
105m/s2以上且8.0
×
105m/s2以下的振动加速度振动的第2振动模式,
89.所述控制部控制所述振动部,使得在执行所述第1振动模式之后执行所述第2振动模式。
90.根据这样的结构,能够进一步提高液滴的去除性能。
91.也可以是,所述振动部具有压电元件,
92.所述控制部在所述第1振动模式时将施加于所述压电元件的电压的值控制在16vp-p以上且60vp-p以下,
93.并且在所述第2振动模式时将施加于所述压电元件的电压的值控制在2vp-p以上且15vp-p以下。
94.根据这样的结构,能够更容易地控制振动加速度。
95.也可以是,所述振动装置还具备:
96.位移检测传感器,其检测与所述透光体的位移量相关的信息,并且将所述信息发送到所述控制部,
97.所述控制部基于所述信息来控制所述振动部的所述振动加速度。
98.根据这样的结构,能够基于与透光体的位移量相关的信息来控制振动部的振动加速度。
99.也可以是,所述振动装置还具备:
100.风机装置,其向所述透光体的表面喷射气体。
101.根据这样的结构,能够进一步提高液滴的去除性能。
102.也可以是,所述振动装置还具备:
103.喷出装置,其向所述透光体的表面喷出液体。
104.根据这样的结构,能够向透光体的表面喷出液体,并且能够将喷出的液体从透光体的表面去除。
105.也可以是,在所述透光体的表面形成有防水涂层。
106.根据这样的结构,能够进一步提高液滴的去除性能。
107.本发明的一个方案的振动控制方法是具备透光体和使所述透光体振动的振动部的振动装置的振动控制方法,其中,该振动控制方法包括利用所述振动部使所述透光体以1.5
×
105m/s2以上且8.0
×
105m/s2以下的振动加速度振动的步骤。
108.根据这样的结构,能够提高液滴的去除性能。
109.也可以是,所述振动的步骤包括:使所述透光体以3.5
×
105m/s2以上且5.5
×
105m/s2以下的振动加速度振动。
110.根据这样的结构,能够进一步提高液滴的去除性能。
111.也可以是,所述振动部具有压电元件,
112.所述振动的步骤包括:利用控制部将施加于所述压电元件的电压的值控制在2vp-p以上且15vp-p以下。
113.根据这样的结构,能够容易地控制振动加速度。
114.也可以是,所述振动部具有压电元件,
115.所述振动的步骤包括:
116.使所述透光体在以8.1
×
105m/s2以上且1.7
×
106m/s2以下的振动加速度振动的第1振动模式下振动;以及
117.使所述透光体在以1.5
×
105m/s2以上且8.0
×
105m/s2以下的振动加速度振动的第2振动模式下振动,
118.在实施了使所述透光体在第1振动模式下振动的步骤之后,实施使所述透光体在所述第2振动模式下振动的步骤。
119.根据这样的结构,能够进一步提高液滴的去除性能。
120.也可以是,使所述透光体在所述第1振动模式下振动包括:利用所述控制部将施加于所述压电元件的电压的值控制在16vp-p以上且60vp-p以下,
121.使所述透光体在所述第2振动模式下振动包括:利用所述控制部将施加于所述压电元件的电压的值控制在2vp-p以上且15vp-p以下。
122.根据这样的结构,能够更容易地控制振动加速度。
123.也可以是,所述振动控制方法还包括检测与所述透光体的位移量相关的信息的步骤,
124.振动的步骤包括:利用控制部,基于所述信息控制所述振动部的所述振动加速度。
125.根据这样的结构,能够基于与透光体的位移量相关的信息来控制振动部的振动加速度。
126.也可以是,所述振动控制方法还包括利用风机装置向所述透光体的表面喷射气体的步骤。
127.根据这样的结构,能够进一步提高液滴的去除性能。
128.也可以是,所述振动控制方法包括利用喷出装置向所述透光体的表面喷出液体的步骤。
129.根据这样的结构,能够向透光体的表面喷出液体,并且能够将喷出的液体从透光体的表面去除。
130.以下根据附图对本发明的一个实施方式进行说明。此外,以下的说明本质上只不过是例示,并不意图限制本公开、其应用物或其用途。而且,附图是示意性的,各尺寸的比例等未必与现实的比例等一致。
131.(实施方式1)
132.本发明的实施方式1的振动装置应用于车载用的摄像单元。因此,在实施方式1中以应用于摄像单元的振动装置为例进行说明。此外,振动装置不限定于车载用的摄像单元的用途。例如,振动装置也能够应用于面向安全的监视照相机、无人机用的摄像单元等。
133.[摄像单元]
[0134]
图1是表示具备本发明的实施方式1的振动装置200的摄像单元100的一例的概略立体图。图2是图1的摄像单元100的概略剖视图。此外,图中的x、y、z方向分别表示摄像单元
100的纵向方向、横向方向、高度方向。
[0135]
如图1和图2所示,摄像单元100具备壳体11、摄像部12以及振动装置200。
[0136]
壳体11收纳振动装置200和摄像部12。例如,壳体11形成为筒状,由金属或合成树脂等形成。在实施方式1中,如图1所示,壳体11形成为方筒状,但也可以是圆筒状等其他形状。在壳体11的一个端部侧固定有底板11a,在另一个端部侧,振动装置200的透光体2以向外部露出的方式配置。
[0137]
如图2所示,摄像部12由主体构件12a支撑,固定于底板11a,该底板11a固定于壳体11。另外,在摄像部12内置有包括摄像元件的电路(省略图示)。作为摄像元件,例如能够列举出接收从可见区域到远红外区域的任一波长的光的cmos、ccd、辐射热测量计或热电堆等。另外,也可以在摄像部12的摄像方向上固定包括多个透镜(省略图示)的透镜单元。此外,摄像部12的构造只要能够对位于透镜的前方的拍摄对象物进行拍摄,就没有特别限定。
[0138]
振动装置200以使透光体2露出的方式安装于壳体11。振动装置200配置于摄像部12的光路上。在实施方式1中,在振动装置200中,以透光体2的表面沿着摄像单元100的高度方向(z方向)的方式配置。
[0139]
[振动装置]
[0140]
接下来对振动装置200详细地进行说明。
[0141]
图3是本发明的实施方式1的振动装置200的一例的概略立体图。图4是图3的振动装置200的分解立体图。图5是图3的振动装置200的概略剖视图。图6是本发明的实施方式1的振动装置200的一例的框图。此外,图中的x、y、z方向分别表示振动装置200的横向方向、厚度方向以及纵向方向。
[0142]
如图1~图6所示,振动装置200具备透光体2、振动部3、控制部4以及供电导体5。此外,在振动装置200中,控制部4和供电导体5不是必需的结构。
[0143]
《透光体》
[0144]
透光体2具有摄像部12所包括的摄像元件等光学检测元件所检测的波长的能量线或光透过的透光性。在实施方式1中,透光体2是用于保护摄像部12免于附着异物的盖。摄像部12配置于透光体2的内部,经由透光体2进行对摄像单元100的外部的摄像对象物的拍摄。
[0145]
作为形成透光体2的材料,例如能够使用透光性的塑料、石英、硼硅等玻璃、透光性的陶瓷或合成树脂等。例如通过由强化玻璃形成透光体2,能够提高透光体2的强度。
[0146]
透光体2具有圆板形状。具体来说,从振动装置200的厚度方向(y方向)观察,透光体2形成为圆形。此外,透光体2的形状不限定于此。例如,从振动装置200的厚度方向(y方向)观察,透光体2例如也可以是多边形、椭圆形或三角形等。
[0147]
透光体2的外周端部与振动部3接合。透光体2与振动部3的接合例如能够使用粘接材料或焊接材料来进行。另外,也能够使用热压接或阳极接合等。
[0148]
在实施方式1中,透光体2具有外径为20mm且厚度为2mm的圆板形状。另外,透光体2由具有透光性的玻璃形成。
[0149]
《振动部》
[0150]
振动部3是使透光体2振动的部件。振动部3使透光体2在振动装置200的厚度方向(y方向)上振动。振动部3构成为使透光体2以预定的振动加速度振动。预定的振动加速度优选为1.5
×
105m/s2以上且8.0
×
105m/s2以下。更优选的是,预定的振动加速度为3.5
×
105m/
s2以上且5.5
×
105m/s2以下。
[0151]
振动部3具有圆筒状的形状。在实施方式1中,振动部3具有内径为16mm、外径为20mm且高度为11mm的圆筒形状。此外,振动部3也可以是内径为16mm以上且36mm以下、外径为22mm以上且40mm以下、高度为9mm以上且40mm以下的圆筒形状。
[0152]
振动部3具备压电元件6和振动体7。
[0153]
压电元件6借助振动体7使透光体2振动。另外,压电元件6与供电导体5连接。压电元件6通过由供电导体5供电来振动。即,压电元件6通过由供电导体5施加电压来振动。
[0154]
例如,压电元件6具有圆环板状。圆环板状是指板状构件形成为环状的形状。
[0155]
压电元件6具有压电体和与供电导体5连接的电极。作为形成压电体的材料,例如能够使用钛酸钡(batio3)、钛酸锆酸铅(pzt:pbtio3·
pbzro3)、钛酸鉛(pbtio3)、偏铌酸铅(pbnb2o6)、钛酸铋(bi4ti3o
12
)、(k,na)nbo3等适当的压电陶瓷或litao3、linbo3等适当的压电单晶等。电极例如可以是ni电极。电极也可以是通过溅射法形成的由ag或au等金属薄膜构成的电极。或者,除了溅射以外,电极也能够通过镀敷、蒸镀而形成。
[0156]
在实施方式1中,压电元件6具有外径为22mm、内径为16mm且厚度为1mm的圆环板状。另外,形成压电元件6的压电体由钛酸锆酸铅(pzt:pb(zr,ti)o3)形成。
[0157]
振动体7配置于压电元件6与透光体2之间。振动体7例如利用粘接材料与压电元件6和透光体2接合。振动体7放大压电元件6的振动,并且向透光体2传递。
[0158]
例如,振动体7具有在振动装置200的厚度方向(y方向)上延伸的圆筒形状。具体来说,振动体7具有圆形的筒状体7a和设于与透光体2的连接侧的端部的圆环板状部7b。
[0159]
筒状体7a具有厚度较薄的薄壁部7c。薄壁部7c在筒状体7a设于连接透光体2的端部与连接压电元件6的端部之间。由此,能够高效地向透光体2传递压电元件6的振动。
[0160]
圆环板状部7b是朝向筒状体7a的中心延伸的板状构件。在圆环板状部7b接合有透光体2。例如,圆环板状部7b的厚度比筒状体7a的厚度小,与薄壁部7c大致相同。
[0161]
例如,振动体7由金属形成。作为形成振动体7的金属,例如能够使用不锈钢、42合金、50合金、因瓦合金、超因瓦合金、科瓦合金、铝或硬铝等。或者,振动体7也可以由氧化铝、氧化锆等陶瓷形成。振动体7也可以由si等半导体形成。振动体7也可以由绝缘材料覆盖。
[0162]
在实施方式1中,振动体7具有内径为16mm、外径为22mm且高度为8mm的圆筒形状。另外,振动体7由不锈钢(sus303)形成。
[0163]
《控制部》
[0164]
控制部4控制振动部3的振动加速度。控制部4经由供电导体5与振动部3的压电元件6连接。控制部4具有供电电路,经由供电导体5向压电元件6供电。即,控制部4经由供电导体5向压电元件6施加电压。由此,控制部4控制振动部3的振动。
[0165]
在实施方式1中,控制部4将施加于压电元件6的电压值控制在2vp-p以上且15vp-p以下。由此,控制部4能够控制振动部3的振动的大小,从而能够将透光体2的振动加速度控制在1.5
×
105m/s2以上且8.0
×
105m/s2以下。
[0166]
优选的是,控制部4将施加于压电元件6的电压值控制在5vp-p以上且8vp-p以下。由此,控制部4能够控制振动部3的振动的大小,从而能够将透光体2的振动加速度控制在3.5
×
105m/s2以上且5.5
×
105m/s2以下。
[0167]
控制部4由作为控制中枢的cpu(central processing unit)等构成。另外,控制部
4具有存储用于cpu动作的程序或控制数据等的rom(read only memory)、作为cpu的工作区而发挥功能的ram(ramdom access memory)、用于保持与外围设备的信号的匹配性的输入输出接口等。
[0168]
《供电导体》
[0169]
供电导体5连接控制部4与压电元件6。供电导体5与包含于控制部4的供电电路连接,由供电电路向压电元件6供电。
[0170]
供电导体5由具有导电性的材料形成。形成供电导体5的材料例如是不锈钢、铍铜、锌白铜、铜等金属。
[0171]
[滑落角与附着能量的关系]
[0172]
接下来对滑落角与附着能量的关系进行说明。
[0173]
滑落角是指在使液滴附着于水平的固体表面上并且使固体表面从水平逐渐倾斜时,液滴开始向下方滑动时的水平面与固体表面之间的角度。图7是说明滑落角与附着能量的关系的一例的概略图。图7所示的关系能够用wolfram所提出的附着能量的计算式来表示。
[0174]
[数式1]
[0175][0176]
e表示附着能量,r表示接触半径,m表示液滴质量,g表示重力加速度,θ表示滑落角。上述公式是由于水和石蜡的滑落角θ与液滴50和固体51的接触面的半径r成比例而通过实验发现的值,假定在滑落角θ液滴50的重力的倾斜方向分量和作用于接触圆周缘部的附着力平衡。另外,该指标在实验上不受液量、倾斜角等左右,是仅由液体和固体的组合唯一确定的评价指标。
[0177]
由上述数式可知,当滑落角θ减小时,附着能量e减小。即,当滑落角θ减小时,液滴50不易附着于固体表面。
[0178]
在振动装置200中,通过使透光体2以预定的振动加速度振动,减小滑落角θ,从而减小液滴要停留在透光体2的表面上的附着能量e。由此,容易将附着于透光体2的液滴去除。
[0179]
[滑落角与振动加速度的关系]
[0180]
图8是表示滑落角与振动加速度的关系的一例的概略图。图8表示相对于振动加速度的变化而言的滑落角的变化。此外,振动加速度的计算通过以下记载的方法来进行。
[0181]
利用电源(是德科技(keysight)公司:e26104a)和函数发生器(泰克科技(tektronix)公司:agf1022)向共振频率60khz附近的振动部3的压电元件6供给信号而激励振动。利用激光位移计(奥林巴斯公司:bx51m)检测由于振动部3的振动而激励的透光体2的位移,并且利用万用表(是德科技公司:2110)和示波器(泰克科技公司:示波器tbs1104)测量该位移。将振动加速度设为α,将频率设为f,将振幅(位移量)设为a,利用α=(2πf)2a的式子计算振动加速度。
[0182]
如图8所示,当振动加速度α为1.5
×
105m/s2以上且8.0
×
105m/s2以下时,滑落角θ成为40度以下(参照图8的“a1”)。当滑落角θ成为40度以下时,液滴的附着能量e比从透光体2的表面向外部滑落的力小。因此,液滴不易停留在透光体2上,液滴向透光体2的外部流动。
由此,液滴的去除性能提高。
[0183]
另外,当振动加速度α为3.5
×
105m/s2以上且5.5
×
105m/s2以下时,滑落角θ成为22度以下(参照图8的“a2”)。当滑落角θ成为22度以下时,液滴的附着能量e进一步减小。因此,液滴容易向透光体2的外部流动,进而,液滴的去除性能提高。
[0184]
当振动加速度α比1.5
×
105m/s2小或比8.0
×
105m/s2大时,滑落角θ比40度大。若滑落角θ比40度大,则液滴的附着能量e比从透光体2的表面向外部滑落的力大。因此,与振动加速度α为3.5
×
105m/s2以上且5.5
×
105m/s2以下时相比,液滴难以滑落。
[0185]
因此,振动加速度α优选为1.5
×
105m/s2以上且8.0
×
105m/s2以下。更优选的是,振动加速度α为3.5
×
105m/s2以上且5.5
×
105m/s2以下。通过将振动加速度α控制在该预定的范围,使得附着于透光体2的表面的液滴的滑落性与其他范围相比提高。
[0186]
在实施方式1中,控制部4通过控制施加于振动部3的压电元件6的电压值,来控制振动加速度α。具体来说,控制部4经由供电导体5向压电元件6施加电压。控制部4控制施加于压电元件6的交流电压的峰峰值(vp-p)。
[0187]
图9是表示滑落角与施加电压的关系的一例的概略图。如图9所示,控制部4通过将施加于压电元件6的电压控制在2vp-p以上且15vp-p以下,能够使振动加速度α成为1.5
×
105m/s2以上且8.0
×
105m/s2以下。由此能够使滑落角θ成为40度以下(参照图9的“b1”)。
[0188]
另外,控制部4通过将施加于压电元件6的电压控制在5vp-p以上且8vp-p以下,能够使振动加速度α成为3.5
×
105m/s2以上且5.5
×
105m/s2以下。由此能够使滑落角θ成为22度以下(参照图9的“b2”)。
[0189]
[动作]
[0190]
对振动装置200的动作的一例即振动控制方法的一例进行说明。此外,振动控制方法是控制振动装置200的方法。
[0191]
图10是本发明的实施方式1的振动控制方法的一例的流程图。图11是表示本发明的实施方式1的振动装置200的动作的一例的概略图。
[0192]
如图10所示,在步骤st10中,利用振动部3使透光体2以预定的振动加速度振动。预定的振动加速度优选为1.5
×
105m/s2以上且8.0
×
105m/s2以下。更优选的是,预定的振动加速度为3.5
×
105m/s2以上且5.5
×
105m/s2以下。
[0193]
如图11所示,透光体2以预定的振动加速度在透光体2的厚度方向(y方向)上振动。由此,附着于透光体2的表面的液滴60滑落,而从透光体2的表面去除。
[0194]
返回图10,在实施方式1中,步骤st10包括利用控制部4控制施加于振动部3的压电元件6的电压值的步骤st11。
[0195]
在步骤st11中,控制部4将施加于压电元件6的电压值控制在2vp-p以上且15vp-p以下。优选的是,控制部4将施加于压电元件6的电压值控制在5vp-p以上且8vp-p以下。
[0196]
像这样,在实施方式1的振动控制方法中,通过执行步骤st10和st11,能够使透光体2振动,从而将附着于透光体2的液滴去除。
[0197]
[效果]
[0198]
根据实施方式1的振动装置200和振动控制方法,能够起到以下的效果。
[0199]
振动装置200具备透光体2和振动部3。振动部3构成为使透光体以1.5
×
105m/s2以上且8.0
×
105m/s2以下的振动加速度振动。根据这样的结构,能够提高附着于透光体2的液
滴的去除性能。具体来说,通过减小附着于透光体2的液滴的滑落角,能够减小液滴的附着能量。由此,液滴容易从透光体2的表面滑落,从而容易从透光体2的表面去除液滴。
[0200]
振动部3优选为使透光体2以3.5
×
105m/s2以上且5.5
×
105m/s2以下的振动加速度振动。根据这样的结构,能够进一步提高液滴的去除性能。具体来说,通过进一步减小滑落角,能够进一步减小液滴的附着能量。由此,液滴更容易从透光体2的表面滑落,从而更容易从透光体2的表面去除液滴。
[0201]
振动装置200还具备控制振动部3的振动加速度的控制部4。根据这样的结构,能够容易地控制振动部3的振动加速度。
[0202]
振动部3具有压电元件6。控制部4将施加于压电元件6的电压的值控制在2vp-p以上且15vp-p以下。根据这样的结构,能够容易地将振动加速度控制在1.5
×
105m/s2以上且8.0
×
105m/s2以下。
[0203]
振动部3具有配置于压电元件6与透光体2之间的振动体7。压电元件6具有圆环板状。振动体7具有圆筒形状。透光体2具有圆板形状。根据这样的结构,能够进一步提高液滴的去除性能。
[0204]
振动控制方法是具备透光体2和使透光体振动的振动部3的振动装置200的振动控制方法,其中,该振动控制方法包括利用振动部3使透光体2以1.5
×
105m/s2以上且8.0
×
105m/s2以下的振动加速度振动的步骤st10。根据这样的结构,能够提高附着于透光体2的液滴的去除性能。具体来说,通过减小附着于透光体2的液滴的滑落角,能够减小液滴的附着能量。由此,液滴容易从透光体2的表面滑落,从而容易从透光体2的表面去除液滴。
[0205]
振动的步骤st10包括使透光体2以3.5
×
105m/s2以上且5.5
×
105m/s2以下的振动加速度振动。根据这样的结构,能够进一步提高液滴的去除性能。
[0206]
振动部3具有压电元件6,振动的步骤st10包括将施加于压电元件6的电压的值控制在2vp-p以上且15vp-p以下的步骤st11。根据这样的结构,能够容易地将振动加速度控制在1.5
×
105m/s2以上且8.0
×
105m/s2以下。
[0207]
此外,在实施方式1中,对应用于摄像单元100的振动装置200的例子进行了说明,但不限定于此。图12是概略地表示实施方式1的振动装置200的图。如图12所示,振动装置200也可以单独使用。或者,振动装置200也可以应用于具备摄像元件以外的光学检测元件的单元。
[0208]
在实施方式1中对透光体2是圆板状的例子进行了说明,但不限定于此。透光体2只要具有板状即可。例如,从振动装置200的厚度方向(y方向)观察,透光体2的形状也可以是多边形、椭圆形或三角形等。
[0209]
图13是本发明的实施方式1的变形例的振动装置201的概略剖视图。如图13所示,振动装置201具备透光体2a和振动部3。在振动装置201中,透光体2形成为圆顶状。圆顶状是指板状构件形成为半球状的形状。即使是这样的结构,也起到与振动装置200相同的效果。另外,在摄像单元中,在透光体2a具有圆顶状的形状的情况下,能够扩大摄像部12的视野。
[0210]
在实施方式1中对振动部3具备振动体7的例子进行了说明,但不限定于此。振动体7不是必需的结构。振动部3只要具备使透光体2振动的元件即可。例如,振动部3也可以是仅具备压电元件6的结构。
[0211]
在实施方式1中对振动装置200具备控制部4的例子进行了说明,但不限定于此。例
如,控制部4也可以包含于与振动装置200分体的装置。
[0212]
在实施方式1中对振动控制方法包括步骤st10和st11的例子进行了说明,但不限定于此。例如,图10所示的步骤st10和st11也可以合并,还可以分割。或者,图10所示的流程图也可以包括追加的步骤。例如,也可以追加获取开始振动的触发信息的步骤。在该情况下,步骤st10也可以基于触发信息而开始由振动部3产生的振动。
[0213]
在实施方式1中对透光体2是具有透光性的盖的例子进行了说明,但不限定于此。例如,透光体2也可以是透镜。
[0214]
(实施方式2)
[0215]
对本发明的实施方式2的振动装置进行了说明。此外,在实施方式2中,主要对与实施方式1的不同点进行说明。在实施方式2中,对与实施方式1相同或等同的结构标注相同的附图标记来进行说明。另外,在实施方式2中省略与实施方式1重复的记载。
[0216]
图14是表示具备本发明的实施方式2的振动装置202的摄像单元101的一例的概略立体图。图15是图14的摄像单元101的概略剖视图。图16是本发明的实施方式2的振动装置202的一例的框图。
[0217]
在实施方式2中与实施方式1的不同点在于,具备风机装置8。
[0218]
如图14~图16所示,振动装置202除了具备实施方式1的振动装置200的结构以外,还具备风机装置8。
[0219]
《风机装置》
[0220]
风机装置8向透光体2的表面喷射气体。风机装置8配置于壳体11的上表面。风机装置8具有配管81、设于配管81的前端的风机头82以及向配管81供给气体的泵83。在配管81和风机头82的内部形成有供气体流通的流路84。
[0221]
例如从风机装置8喷射的气体是空气。
[0222]
配管81配置于壳体11的上表面,朝向透光体2延伸。在实施方式2中,配管81在振动装置202的厚度方向(y方向)上延伸。配管81与泵83连接。
[0223]
风机头82设于配管81的前端,限定所喷射的气体的朝向。风机头82朝向透光体2设置。在实施方式2中,风机头82朝向振动装置202的纵向方向(z方向)。例如,风机头82也可以朝向重力作用的方向。
[0224]
泵83与配管81连接,向设于配管81和风机头82的内部的流路84供给气体。
[0225]
在实施方式2中,风机装置8由控制部4控制。具体来说,控制部4通过控制泵83,来控制气体从风机头82的喷射。
[0226]
[动作]
[0227]
对振动装置202的动作的一例即振动控制方法的一例进行说明。此外,振动控制方法是控制振动装置202的方法。
[0228]
图17是本发明的实施方式2的振动控制方法的一例的流程图。图17所示的步骤st10和st11与实施方式1的图10所示的步骤st10和st11相同,因此省略详细的说明。图18是表示本发明的实施方式2的振动装置202的动作的一例的概略图。
[0229]
如图17所示,在步骤st20中,利用风机装置8向透光体2的表面喷射气体。具体来说,在步骤st20中,通过控制部4控制泵83而向配管81供给气体。从泵83供给的气体经由设于配管81内部的流路84从风机头82喷射。风机头82朝向透光体2的表面配置。因此,气体从
风机头82朝向透光体2的表面喷射。利用从风机头82喷射的气体的风压,来促进附着于透光体2的表面的液滴的滑落。
[0230]
如图18所示,当利用风机装置8向透光体2的表面喷射气体时,附着于透光体2的表面的液滴60容易滑落。具体来说,由于振动部3的振动,使液滴60的滑落角θ减小,因此液滴60容易由于气体的流动而滑落。由此,能够更容易地从透光体2的表面去除液滴60。
[0231]
[效果]
[0232]
根据实施方式2的振动装置202和振动控制方法,能够起到以下的效果。
[0233]
振动装置202具备向透光体2的表面喷射气体的风机装置8。根据这样的结构,能够利用从风机装置8喷射的气体容易地将附着于透光体2的表面的液滴去除。具体来说,通过由振动部3产生的振动,来减小附着于透光体2的表面的液滴60的滑落角θ,从而成为液滴60容易滑落的状态。在该状态下,通过向透光体2的表面喷射气体,使液滴容易从透光体2的表面滑落。其结果为,能够进一步提高液滴的去除性能。
[0234]
根据振动装置202,利用由振动部3产生的振动和由风机装置8进行的气体喷射,能够在更短时间内将附着于透光体2的表面的液滴去除。
[0235]
另外,根据振动装置203,利用由振动部3产生的振动使液滴容易滑落,因此能够实现泵83的低输出化,能够实现低成本化和低耗电化。
[0236]
实施方式2的振动控制方法包括向透光体2的表面喷射气体的步骤st20。根据这样的结构,能够利用从风机装置8喷射的气体容易地将附着于透光体2的表面的液滴去除。
[0237]
此外,在实施方式2中对风机装置8的配管81配置于壳体11的上表面的例子进行了说明,但不限定于此。风机装置8的配管81也可以配置于壳体11的内部,还可以配置于壳体11的侧面或底面。
[0238]
在实施方式2中对风机装置8具备泵83的例子进行了说明,但不限定于此。风机装置8只要具备能够由控制部4控制且能够供给气体的装置即可。
[0239]
在实施方式2中对风机头82朝向振动装置202的纵向方向(z方向)的例子进行了说明,但不限定于此。风机头82只要朝向能够向透光体2的表面喷射气体的方向即可。例如,风机头82也可以朝向相对于透光体2的表面倾斜的方向配置。
[0240]
在实施方式2中对振动控制方法包括步骤st10、st11以及st20的例子进行了说明,但不限定于此。例如,图17所示的步骤st10、st11以及st20也可以合并,还可以分割。或者,图17所示的流程图也可以包括追加的步骤。
[0241]
(实施方式3)
[0242]
对本发明的实施方式3的振动装置进行说明。此外,在实施方式3中,主要对与实施方式1的不同点进行说明。在实施方式3中,对与实施方式1相同或等同的结构标注相同的附图标记来进行说明。另外,在实施方式3中省略与实施方式1重复的记载。
[0243]
图19是表示具备本发明的实施方式3的振动装置203的摄像单元102的一例的概略剖视图。图20是本发明的实施方式3的振动装置203的一例的框图。
[0244]
在实施方式3中与实施方式1的不同点在于,具备喷出装置9。
[0245]
如图19和图20所示,振动装置203除了具备实施方式1的振动装置200的结构以外,还具备喷出装置9。
[0246]
《喷出装置》
[0247]
喷出装置9向透光体2的表面喷出液体。喷出装置9配置于壳体11的上表面。喷出装置9具有配管91、设于配管91的前端的喷出头92以及向配管91供给液体的泵93。在配管91和喷出头92的内部形成有供液体流通的流路94。
[0248]
例如从喷出装置9喷出的液体是清洗液。
[0249]
配管91配置于壳体11的上表面,朝向透光体2延伸。在实施方式3中,配管91在振动装置203的厚度方向(y方向)上延伸。配管91与泵93连接。
[0250]
喷出头92设于配管91的前端,限定所喷出的液体的朝向。喷出头92朝向透光体2地设置。在实施方式3中,喷出头92朝向振动装置203的纵向方向(z方向)。例如喷出头92也可以朝向重力作用的方向。
[0251]
泵93与配管91连接,向设于配管91和喷出头92的内部的流路94供给液体。
[0252]
在实施方式3中,喷出装置9由控制部4控制。具体来说,控制部4通过控制泵93来控制液体从喷出头92的喷出。
[0253]
[动作]
[0254]
对振动装置203的动作的一例即振动控制方法的一例进行说明。此外,振动控制方法是控制振动装置203的方法。
[0255]
图21是本发明的实施方式3的振动控制方法的一例的流程图。图21所示的步骤st10和st11与实施方式1的图10所示的步骤st10和st11相同,因此省略详细的说明。图22是表示本发明的实施方式3的振动装置203的动作的一例的概略图。
[0256]
如图21所示,在步骤st30中,利用喷出装置9向透光体2的表面喷出液体。具体来说,在步骤st30中,通过控制部4控制泵93而向配管91供给液体。从泵93供给的气体经由设于配管91内部的流路94从喷出头92喷射。喷出头92朝向透光体2的表面配置。因此,从喷出头92朝向透光体2的表面喷出液体。
[0257]
如图22所示,喷出装置9向透光体2的表面喷出液体61。在液体61是清洗液的情况下,附着于透光体2的表面的污垢等异物62被液体61去除。
[0258]
通过在向透光体2的表面喷出液体61之后执行步骤st10和st11,将附着于透光体2的表面的液滴60去除。
[0259]
[效果]
[0260]
根据实施方式3的振动装置203和振动控制方法,能够起到以下的效果。
[0261]
振动装置203具备向透光体2的表面喷出液体61的喷出装置9。根据这样的结构,能够向透光体2的表面喷出液体61。另外,在向透光体2的表面喷出液体61之后,能够利用由振动部3产生的振动将附着于透光体2的表面的液滴60去除。
[0262]
根据振动装置203,利用由振动部3产生的振动使液滴60容易滑落,因此能够实现泵93的低输出化,能够实现低成本化和低耗电化。
[0263]
例如,在从喷出装置9喷出的液体61是清洗液的情况下,能够利用液体61清洗透光体2的表面。由此能够将附着于透光体2的表面的污垢等异物62去除。在利用液体61清洗透光体2的表面之后,能够利用由振动部3产生的振动容易地从透光体2的表面去除液滴60。
[0264]
实施方式3的振动控制方法包括向透光体2的表面喷出液体61的步骤st30。根据这样的结构,能够向透光体2的表面喷出液体61。另外,在向透光体2的表面喷出液体61之后,能够利用由振动部3产生的振动将附着于透光体2的表面的液滴60去除。
[0265]
此外,在实施方式3中对喷出装置9的配管91配置于壳体11的上表面的例子进行了说明,但不限定于此。喷出装置9的配管91也可以配置于壳体11的内部,还可以配置于壳体11的侧面或底面。
[0266]
在实施方式3中对喷出装置9具备泵93的例子进行了说明,但不限定于此。喷出装置9只要具备能够由控制部4控制且能够供给液体的装置即可。
[0267]
在实施方式3中对喷出头92朝向振动装置203的纵向方向(z方向)的例子进行了说明,但不限定于此。喷出头92只要朝向能够向透光体2的表面喷出液体61的方向即可。例如,喷出头92也可以朝向相对于透光体2的表面倾斜的方向配置。
[0268]
在实施方式3中对从喷出装置9喷出的液体61是清洗液的例子进行了说明,但不限定于此。例如从喷出装置9喷出的液体61也可以是涂敷材料。
[0269]
在实施方式3中对振动装置203在由喷出装置9喷出液体61之后执行由振动部3产生的振动的例子进行了说明,但不限定于此。例如,振动装置203也可以并行地执行由喷出装置9进行的液体61的喷出和由振动部3产生的振动。或者,振动装置203也可以在执行由振动部3产生的振动的中途执行由喷出装置9进行的液体61的喷出。
[0270]
在实施方式3中对振动控制方法包括步骤st10、st11以及st30的例子进行了说明,但不限定于此。例如,图21所示的步骤st10、st11以及st30也可以合并,还可以分割。或者,图21所示的流程图也可以包括追加的步骤。
[0271]
在实施方式3中对在步骤st30之后执行步骤st10和st11的例子进行了说明,但不限定于此。例如,步骤st10和st11也可以与步骤st30并行地执行,还可以在执行步骤st30之前执行。
[0272]
(实施方式4)
[0273]
对本发明的实施方式4的振动装置进行说明。此外,在实施方式4中,主要对与实施方式1的不同点进行说明。在实施方式4中,对与实施方式1相同或等同的结构标注相同的附图标记来进行说明。另外,在实施方式4中省略与实施方式1重复的记载。
[0274]
图23是本发明的实施方式4的振动装置204的一例的局部放大剖视图。
[0275]
在实施方式4中与实施方式1的不同点在于,具备防水涂层20。
[0276]
如图23所示,在振动装置204中,在透光体2的表面形成有防水涂层20。
[0277]
《防水涂层》
[0278]
防水涂层20是排斥液体的层。例如,防水涂层20由接触角比透光体2的表面大的构件形成。在实施方式4中,在透光体2的整个表面形成有防水涂层20。
[0279]
防水涂层20例如能够通过将氟类的涂敷材料或硅酮类的涂敷材料涂敷于透光体盖2的表面来形成。作为氟类的涂敷材料,例如有以具有全氟烷基的化合物为主要成分的材料、或以具有全氟烷基(将烷基的h置换为f的材料)的化合物为主要成分的材料等。作为氟类涂敷材料的具体例,例如列举出氟类聚合物、聚四氟乙烯(ptfe)等。作为硅酮类的涂敷材料,例如是主链部分具有由硅(si)和氧(o)的直接结合构成的部分的材料,作为其一例列举出硅油等。
[0280]
[效果]
[0281]
根据实施方式4的振动装置204,能够起到以下的效果。
[0282]
在振动装置204中,在透光体2的表面形成有防水涂层20。根据这样的结构,能够容
易地将附着于透光体2的表面的液滴去除。具体来说,利用防水涂层20,能够使接触角比透光体2的表面大。由此,减小液滴的附着能量,从而容易从透光体2的表面去除液滴。
[0283]
另外,能够在更短时间内从透光体2的表面去除液滴。
[0284]
另外,利用防水涂层20,也能够抑制液滴附着于透光体2的表面。
[0285]
此外,在实施方式4中对在透光体2的整个表面形成有防水涂层20的例子进行了说明,但不限定于此。例如也可以在透光体2的表面的局部形成有防水涂层20。
[0286]
在实施方式4中对防水涂层20由氟类的涂敷材料或硅酮类的涂敷材料形成的情况进行了说明,但不限定于此。例如,防水涂层20也可以具有利用凹凸来排斥液体的结构。
[0287]
图24是防水涂层20a的一例的概略图。如图24所示,防水涂层20a包括多个突起21。多个突起21例如具有圆柱形状。多个突起21彼此具有间隔地配置。多个突起21的大小(例如直径或一边的长度)和配置间隔可以是500nm以下。
[0288]
多个突起21例如能够通过在透光体2的表面旋转涂布包括粒子直径为40nm~100nm左右的二氧化硅纳米微粒的溶液并且使其进行溶胶凝胶反应而形成。另外,能够利用在表面具有微细凹凸形状的模具将形状转印到透光体2的表面而形成。
[0289]
(实施方式5)
[0290]
对本发明的实施方式5的振动装置进行说明。此外,在实施方式5中,主要对与实施方式1的不同点进行说明。在实施方式5中,对与实施方式1相同或等同的结构标注相同的附图标记来进行说明。另外,在实施方式5中省略与实施方式1重复的记载。
[0291]
图25是表示本发明的实施方式5的振动装置205的一例的概略剖视图。图26是本发明的实施方式5的振动装置205的一例的框图。
[0292]
在实施方式5中与实施方式1的不同点在于,具备位移检测传感器10。
[0293]
如图25和图26所示,振动装置205除了具备实施方式1的振动装置200的结构以外,还具备位移检测传感器10。
[0294]
《位移检测传感器》
[0295]
位移检测传感器10检测与透光体2的位移量相关的信息。与位移量相关的信息是指能够计算透光体2在厚度方向上的位移量的信息。在实施方式5中,位移检测传感器10是激光多普勒位移计,与位移量相关的信息是电压值。位移检测传感器10从振动装置204的内侧向透光体2的背面照射激光,利用激光的多普勒效应而非接触地获取与位移量相关的信息。
[0296]
此外,位移检测传感器10不限定于激光多普勒位移计,只要是能够获取与透光体2的位移量相关的信息的传感器即可。例如,位移检测传感器10也可以是超声波传感器、麦克风、激光传感器。另外,与位移量相关的信息不限定于电压值,只要是能够计算透光体2的位移量的信息即可。或者,与位移量相关的信息也可以是透光体2的位移量。
[0297]
位移检测传感器10将检测到的信息发送到控制部4。
[0298]
控制部4从位移检测传感器10接收与位移量相关的信息,基于接收到的信息控制振动部3的振动加速度。具体来说,控制部4基于接收到的信息计算透光体2的位移量。控制部4基于计算的位移量控制振动部3的振动加速度。
[0299]
[动作]
[0300]
对振动装置205的动作的一例即振动控制方法的一例进行说明。此外,振动控制方
法是控制振动装置205的方法。
[0301]
图27是本发明的实施方式5的振动控制方法的一例的流程图。图27所示的步骤st44与实施方式1的图10所示的步骤st10相同,因此省略详细的说明。图28是表示本发明的实施方式5的振动装置205的动作的一例的概略图。图28的(a)表示透光体2的位移量的时间变化的一例。图28的(b)表示振动部3的振动加速度的时间变化的一例。图28的(c)表示各时间的振动装置205的动作的一例。
[0302]
如图27和图28所示,在步骤st40中,利用振动部3使透光体2在检测振动模式下振动。检测振动模式是指为了检测透光体2的位移量而使透光体2振动的模式。在检测振动模式下,控制部4控制振动部3,使透光体2以检测用振动加速度αa振动。检测用振动加速度αa设定为能够利用位移检测传感器10检测透光体2的位移量的变化的值。检测用振动加速度αa例如设定为不足1.5
×
105m/s2。在该情况下,透光体2在厚度方向上以不足1μm移位。
[0303]
在步骤st41中,利用位移检测传感器10检测与透光体2的位移量相关的信息。在实施方式5中,位移检测传感器10是激光多普勒位移计,因此获取电压值的信息作为与位移量相关的信息。
[0304]
在步骤st42中,利用位移检测传感器10将与位移量相关的信息发送到控制部4。控制部4从位移检测传感器10接收与位移量相关的信息,基于接收到的信息计算透光体2的位移量。
[0305]
如图28所示,当在检测振动模式下在透光体2未附着液滴时(t=t0),透光体2的位移量大致恒定。当在透光体2附着有液滴时(t=t1),透光体2的位移量减小。即,当附着于透光体2的液滴的量增加时,透光体2的位移量减小。像这样,附着于透光体2的液滴的量与透光体2的位移量处于成反比的关系。因此,控制部4能够基于透光体2的位移量来推定附着于透光体2的液滴的量。
[0306]
在步骤st43中,利用控制部4判断透光体2的位移量是否比阈值s1小。在步骤st43中,在位移量为阈值s1以上的情况下,流程返回到步骤st41。在位移量比阈值s1小的情况下,流程前进到st44。
[0307]
在步骤st44中,利用振动部3使透光体2在液滴去除振动模式下振动。步骤st44与实施方式1的步骤st10相同。控制部4在以预定的时间执行步骤st44之后,结束步骤st44。通过透光体2在液滴去除振动模式下振动,从透光体2的表面去除液滴。此外,液滴去除振动模式是指产生在实施方式1的步骤st10中说明的振动的模式,使透光体2以预定的振动加速度即1.5
×
105m/s2以上且8.0
×
105m/s2以下的振动加速度振动。
[0308]
如图28所示,当透光体2在液滴去除振动模式下振动时(t=t2),附着于透光体2的液滴滑落。当以预定的时间执行液滴去除振动模式时(t=t3),附着于透光体2的液滴几乎都滑落。此后,控制部4返回到检测振动模式。
[0309]
这样,在实施方式5的振动装置205中,基于透光体2的位移量控制透光体2的振动加速度。
[0310]
[效果]
[0311]
根据实施方式5的振动装置205,能够起到以下的效果。
[0312]
振动装置205具备检测与透光体2的位移量相关的信息并且将检测到的信息发送到控制部4的位移检测传感器10。控制部4基于接收到的信息控制振动部3的振动加速度。
[0313]
振动控制方法包括检测与透光体2的位移量相关的信息的步骤st41。振动的步骤包括利用控制部4基于检测到的信息控制振动部3的振动加速度的步骤st42~st44。根据这样的结构,能够基于与透光体2的位移量相关的信息控制振动部3的振动加速度。
[0314]
根据这样的结构,能够基于与透光体2的位移量相关的信息控制振动部3的振动加速度。由此,能够在附着于透光体2的液滴的量增加的适当时刻,使透光体2以预定的振动加速度即1.5
×
105m/s2以上且8.0
×
105m/s2以下的振动加速度振动。
[0315]
此外,在实施方式5中对检测用振动加速度αa设定为不足1.5
×
105m/s2的例子进行了说明,但不限定于此。检测用振动加速度αa只要设定为能够检测透光体2的位移量的变化的振动加速度即可。
[0316]
在实施方式5中对控制部4在以预定的时间执行了步骤st44的液滴去除模式之后结束的例子进行了说明,但不限定于此。例如控制部4也可以基于透光体2的位移量来确定液滴去除模式的结束时刻。另外,也可以在步骤st44结束之后开始检测振动模式。检测振动模式既可以始终执行,也可以定期地执行。
[0317]
图30是本发明的实施方式5的变形例的振动控制方法的一例的流程图。如图30所示,变形例的振动控制方法还包括步骤st45~st47。
[0318]
在步骤st45中,与步骤st41同样地,利用位移检测传感器10检测与透光体2的位移量相关的信息。
[0319]
在步骤st46中,与步骤st42同样地,利用位移检测传感器10将与位移量相关的信息发送到控制部4。控制部4从位移检测传感器10接收与位移量相关的信息,并且基于接收到的信息计算透光体2的位移量。
[0320]
在步骤st47中,利用控制部4判断透光体2的位移量是否在阈值s2以上。在步骤st47中,在位移量比阈值s2小的情况下,流程返回到步骤st44。由此,继续进行步骤st44的在液滴去除振动模式下的振动。在位移量在阈值s2以上的情况下,流程结束。由此,结束步骤st44的在液滴去除振动模式下的振动。
[0321]
这样,基于透光体2的位移量,确定在液滴去除振动模式下的振动的结束,从而能够在更适当的时刻结束用于去除液滴的振动。
[0322]
(实施方式6)
[0323]
对本发明的实施方式6的振动装置进行说明。此外,在实施方式6中,主要对与实施方式5的不同点进行说明。在实施方式6中,对与实施方式5相同或等同的结构标注相同的附图标记来进行说明。另外,在实施方式6中省略与实施方式5重复的记载。
[0324]
图30是本发明的实施方式6的振动控制方法的一例的流程图。图30所示的步骤st50~st53以及st55与实施方式5的图27所示的步骤st40~st44相同,因此省略详细的说明。图31是表示本发明的实施方式6的振动装置的动作的一例的概略图。图31的(a)表示透光体2的位移量的时间变化的一例。图31的(b)表示振动部3的振动加速度的时间变化的一例。图31的(c)表示各时间的振动装置的动作的一例。
[0325]
在实施方式6中与实施方式5的不同点在于,在振动控制方法中,在实施了第1振动模式之后切换为第2振动模式。此外,第2振动模式相当于实施方式5的液滴去除振动模式。
[0326]
在实施方式6的振动装置中,控制部4具有第1振动模式和第2振动模式。实施方式6的振动装置的其他结构是与实施方式5的振动装置205相同的结构。
[0327]
第1振动模式是使透光体2以8.1
×
105m/s2以上且1.7
×
106m/s2以下的振动加速度振动的振动模式。第2振动模式是使透光体2以1.5
×
105m/s2以上且8.0
×
105m/s2以下的振动加速度振动的振动模式。控制部4在执行了第1振动模式之后执行第2振动模式。
[0328]
[动作]
[0329]
对实施方式6的振动装置的动作的一例即振动控制方法的一例进行说明。
[0330]
如图30和图31所示,在步骤st50中,利用振动部3使透光体2在检测振动模式下振动。
[0331]
在步骤st51中,利用位移检测传感器10检测与透光体2的位移量相关的信息。在实施方式5中,位移检测传感器10是激光多普勒位移计,因此获取电压值的信息作为与位移量相关的信息。
[0332]
在步骤st52中,利用位移检测传感器10将与位移量相关的信息发送到控制部4。
[0333]
在步骤st53中,利用控制部4判断透光体2的位移量是否比阈值s1小。在步骤st53中,在位移量为阈值s1以上的情况下,流程返回到步骤st51。在位移量比阈值s1小的情况下,流程前进到st54。
[0334]
在步骤st54中,利用振动部3使透光体2在第1振动模式下振动。第1振动模式是指在透光体2的表面聚集液滴的振动模式。在第1振动模式下,控制部4控制振动部3,使得透光体2以8.1
×
105m/s2以上且1.7
×
106m/s2以下的第1振动加速度αc振动。
[0335]
步骤st54包括利用控制部4控制施加于压电元件6的电压的值的步骤st54a。在步骤st54a中,利用控制部4将施加于压电元件6的电压的值控制在16vp-p以上且60vp-p以下。由此,能够使透光体2以8.1
×
105m/s2以上且1.7
×
106m/s2以下的第1振动加速度αc振动。
[0336]
如图31所示,液滴有时分散地附着于透光体2的表面(t=t1)。在第1振动模式下,通过振动使分散在透光体2的表面的液滴在透光体2中的位移量最大的部分聚集(t=t2b)。在实施方式6中,透光体2具有圆板形状,且在透光体2的外缘被支承的状态下振动。因此,透光体2的位移量最大的部分成为透光体2的中央。
[0337]
控制部4在使透光体2在第1振动模式下振动了预定时间之后,切换为第2振动模式。实施第1振动模式的期间比实施第2振动模式的期间短。此外,实施第1振动模式的期间能够任意地设定。例如,在液滴附着于透光体2的情形较多的情况下,可以延长实施第1振动模式的期间。在液滴附着于透光体2的情形较少的情况下,可以缩短实施第1振动模式的期间。
[0338]
在步骤st55中,利用振动部3使透光体2在第2振动模式下振动。第2振动模式是指实施方式5的液滴去除振动模式,是使附着于透光体2的表面的液滴滑落的振动模式。在第2振动模式中,控制部4控制振动部3,使得透光体2以1.5
×
105m/s2以上且8.0
×
105m/s2以下的第2振动加速度αb振动。
[0339]
步骤st55包括利用控制部4控制施加于压电元件6的电压的值的步骤st55a。在步骤st55a中,利用控制部4将施加于压电元件6的电压的值控制在2vp-p以上且15vp-p以下。由此,能够使透光体2以1.5
×
105m/s2以上且8.0
×
105m/s2以下的第2振动加速度αb振动。
[0340]
图32和图33是表示图30的振动控制方法中的液滴的运动的一例的概略图。图32表示图30的步骤st54中的液滴的运动的一例。图33表示图30的步骤st55中的液滴的运动的一例。如图32所示,在步骤st54中,通过使透光体2在第1振动模式下振动,使得分散在透光体2
的表面的多个液滴60聚集在透光体2的中央。由此,多个液滴60聚集而成为较大的液滴60a。液滴60a由于重量比液滴60大,因此容易在重力方向上滑落。然后,如图33所示,在步骤st55中,通过使透光体2在第2振动模式下振动,使得聚集在透光体2的中央的液滴60a向重力方向滑落。
[0341]
这样,在实施方式6的振动控制方法中,在第1振动模式下使液滴60在透光体2的表面聚集,在第2振动模式下使聚集的液滴60a从透光体2滑落。
[0342]
[滑落角与振动加速度的关系]
[0343]
图34是表示滑落角与振动加速度的关系的一例的概略图。图34表示相对于振动加速度的变化而言的滑落角的变化。此外,振动加速度的计算通过以下记载的方法来进行。
[0344]
利用电源(是德科技公司:e26104a)和函数发生器(泰克科技公司:agf1022)向共振频率60khz附近的振动部3的压电元件6供给信号而激励振动。利用激光位移计(奥林巴斯公司:bx51m)检测通过振动部3的振动而激励的透光体2的位移,并且利用万用表(是德科技公司:2110)和示波器(泰克科技公司:示波器tbs1104)测量该位移。将振动加速度设为α,将频率设为f,将振幅(位移量)设为a,利用α=(2πf)2a的式子计算振动加速度。
[0345]
如在实施方式1中描述的那样,当滑落角θ比40度大时,液滴的附着能量e比从透光体2的表面向外部滑落的力大。因此,液滴聚集在透光体2中位移量最大的部分即透光体2的中央部。参照图34,当振动加速度α为8.1
×
105m/s2以上时,滑落角θ比40度大。此外,当振动加速度α比1.7
×
106m/s2大时,滑落角θ在90度附近。当滑落角在90度附近时,液滴示出接近垂直落下的运动,即便使滑落角进一步上升,液滴的运动也不再变化。即,当滑落角在90度附近时,液滴的运动饱和。另外,当使振动加速度α过大时,施加于振动装置自身的负荷增大。因此,将使液滴的运动饱和的滑落角在90度附近的1.7
×
106m/s2设为振动加速度的最大值。
[0346]
因此,在第1振动模式下,振动加速度α优选为8.1
×
105m/s2以上且1.7
×
106m/s2以下(参照图34的“c1”)。通过将振动加速度α控制在该预定的范围,能够使附着于透光体2的表面的液滴聚集。
[0347]
在实施方式6中,控制部4通过控制施加于振动部3的压电元件6的电压值来控制振动加速度α。具体来说,控制部4经由供电导体5向压电元件6施加电压。控制部4控制施加于压电元件6的交流电压的峰峰值(vp-p)。
[0348]
图35是表示滑落角与施加电压的关系的一例的概略图。如图35所示,控制部4通过将施加于压电元件6的电压控制在16vp-p以上且60vp-p以下,能够使振动加速度α成为8.1
×
105m/s2以上且1.7
×
106m/s2以下(参照图35的“d1”)。
[0349]
[效果]
[0350]
根据实施方式6的振动装置和振动控制方法,能够起到以下的效果。
[0351]
实施方式6的控制部4具有第1振动模式和第2振动模式。第1振动模式使透光体2以8.1
×
105m/s2以上且1.7
×
106m/s2以下的振动加速度振动。第2振动模式使透光体2以1.5
×
105m/s2以上且8.0
×
105m/s2以下的振动加速度振动。控制部4控制振动部3,使得在执行第1振动模式之后执行第2振动模式。具体来说,控制部4在第1振动模式时将施加于压电元件6的电压的值控制在16vp-p以上且60vp-p以下,在第2振动模式时将施加于压电元件6的电压的值控制在2vp-p以上且15vp-p以下。
[0352]
在实施方式6的振动控制方法中,振动的步骤包括使透光体2在第1振动模式下振动的步骤st54和使透光体2在第2振动模式下振动的步骤st55。使透光体2在第2振动模式下振动的步骤st54在实施了使透光体2在第1振动模式下振动的步骤之后实施。具体来说,步骤st54包括利用控制部4将施加于压电元件6的电压的值控制在16vp-p以上且60vp-p以下的步骤st54a,步骤st55包括利用控制部4将施加于压电元件6的电压的值控制在2vp-p以上且15vp-p以下的步骤st55a。
[0353]
根据这样的结构,能够进一步提高液滴的去除性能。在实施方式6中,通过执行第1振动模式,能够使液滴在透光体2的表面聚集。通过使液滴聚集,使得多个液滴合体。合体的液滴的重量增加,因此容易在重力方向上滑落。这样,在实施方式6中,能够在第1振动模式下使液滴在透光体2的表面聚集之后,在第2振动模式下使聚集的液滴从透光体2的表面滑落。由此,与在液滴分散在透光体2的表面的状态下使液滴滑落的情况相比,在实施方式6中能够提高液滴的去除性能。换言之,在实施方式6中,能够更容易地将附着于透光体2的液滴去除,并且能够在更短的时间内将液滴去除。
[0354]
另外,在实施方式6中,即使在含有异物的液滴附着于透光体2的情况下,不使用清洗液也能够容易地将液滴去除。例如,泥水等含有固体的液滴与雨水等比较不含有固体的液滴相比,存在难以通过振动而滑落的倾向。在实施方式6中,即使附着于透光体2的表面的液滴是泥水等含有异物的液滴,也能够不使用清洗液地去除。
[0355]
另外,在实施方式6中,也可以像实施方式4那样在透光体2的表面形成有防水涂层20。即使在泥水等含有异物的液滴附着于透光体2的情况下,也能够在短时间内去除液滴,因此能够抑制由于液滴造成的防水涂层20的磨损。由此能够延长防水涂层20的涂层寿命。
[0356]
此外,在实施方式6中对振动控制方法包括步骤st50~st53的例子进行了说明,但不限定于此。图36是本发明的实施方式6的变形例的振动控制方法的一例的流程图。如图36所示,实施方式6的振动控制方法只要包括步骤st54和st55即可,也可以不包括步骤st50~st53。在该情况下,步骤st54和st55既可以定期地执行,也可以基于使用者的输入信息而执行。
[0357]
(实施例)
[0358]
作为实施例,使用实施方式6的振动装置和振动控制方法进行性能评价,测量涂层磨损时间、泥水去除率以及清洗液的使用量。另外,作为比较例,使用未控制振动加速度的振动装置,进行与实施例相同的性能评价,测量涂层磨损时间、泥水去除率以及清洗液的使用量。比较例除了未控制振动加速度这一点和喷出清洗液这一点以外,与实施例的振动装置相同。
[0359]
实施例和比较例的性能评价通过实施下述的步骤(1)~(9)来进行。
[0360]
(1)在性能评价所使用的振动装置的透光体2的表面,作为防水涂层20,涂布株式会社锦之堂销售的rain x。
[0361]
(2)测量透光体2的初始接触角。针对接触角,用计算机读取拍摄了赋予有水滴的透光体2的图像,并测量水滴相对于透光体2的表面的接触角。
[0362]
(3)使用激光多普勒位移计(小野测器制:laservibrometer lv-1800)来监测透光体2的位移量。
[0363]
(4)在透光体2的表面涂布10μl的泥水。
[0364]
(5)驱动振动装置。此外,在比较例中,由于难以通过振动去除泥水,因此向透光体2的表面喷出清洗液。另外,在比较例中,用量杯盛接向透光体2喷出的清洗液。
[0365]
(6)在使驱动装置驱动20秒之后,停止振动装置。
[0366]
(7)通过测量接触角并计算接触角的减小速度,来计算防水涂层20的涂层磨损时间。具体来说,测量接触角的减小量和到减小为止花费的时间,从而计算接触角的减小速度。通过由接触角的减小速度计算到成为透光体2的本来的接触角为止的时间,来计算涂层磨损时间。
[0367]
(8)将残留于透光体2的泥水回收,来计算泥水去除率。
[0368]
(9)通过测量用量杯盛接的清洗液的重量来定量化,从而测量清洗液的使用量。
[0369]
在实施例中,将通过性能评价的步骤(7)~(9)得到的评价结果分别设为实施例1、实施例2以及实施例3。在比较例中,将通过性能评价的步骤(7)~(9)得到的评价结果分别设为比较例1、比较例2以及比较例3。
[0370]
图37是表示实施例1和比较例1的涂层磨损时间的图表。涂层磨损时间是指到防水涂层20剥落为止的时间,即防水涂层20寿命。如图37所示,比较例1中的涂层磨损时间是4分钟,与此相对,实施例1中的涂层磨损时间是25分钟。在实施例1中,与比较例1相比涂层磨损时间延长至6.2倍。由此可知,在实施例1中,与比较例1相比防水涂层20的寿命延长。
[0371]
图38是表示实施例2和比较例2的泥水去除率的图表。如图38所示,比较例2中的泥水去除率是53%,与此相对,实施例2中的泥水去除率是98%。在实施例2中,与比较例2相比泥水去除率增大至1.8倍。由此可知,在实施例2中,与比较例2相比泥水的去除效率提高。
[0372]
图39是表示实施例3和比较例3的清洗液的使用量的图表。如图39所示,比较例3中的清洗液的使用量是3.0ml。在实施例3中未使用清洗液,因此清洗液的使用量是0ml。由此可知,在实施例3中,即使不像比较例3那样使用清洗液也能够将附着于透光体2的泥水去除。
[0373]
(实施方式7)
[0374]
对本发明的实施方式7的振动装置进行说明。此外,在实施方式7中,主要对与实施方式1的不同点进行说明。在实施方式7中,对与实施方式1相同或等同的结构标注相同的附图标记来进行说明。另外,在实施方式7中省略与实施方式1重复的记载。
[0375]
图40是表示具备本发明的实施方式7的振动装置206的摄像单元104的一例的概略立体图。图41是图40的摄像单元104的分解立体图。图42是图40的摄像单元104的概略剖视图。
[0376]
在实施方式7中与实施方式1的不同点在于,振动装置206具备内层透镜30和内层镜筒31。另外,在实施方式7中与实施方式1的不同点还在于,透光体2b是透镜。
[0377]
如图40~图42所示,摄像单元104具备壳体11a、摄像部12以及振动装置206。
[0378]
壳体11a收纳摄像部12。例如,壳体11a具有筒形状,该筒形状具有设有开口的端部,该壳体11a由金属或合成树脂等形成。在实施方式7中壳体11a形成为方筒状,但也可以是圆筒状等其他形状。
[0379]
摄像部12配置于固定在壳体11a内的底板11a。另外,在摄像部12内置有包括摄像元件的电路(省略图示)。作为摄像元件,例如可以是接收从可见区域到远红外区域的任一波长的光的cmos、ccd、辐射热测量计或热电堆等。
[0380]
振动装置206固定于壳体11a的端部。振动装置206从壳体11a露出,配置于摄像部12的光路上。振动装置206具备透光体2b、振动部3a、固定部13、内层透镜30以及内层镜筒31。
[0381]
透光体2b是配置于最外层的透镜。在实施方式7中,透光体2b是具有圆顶形状的透镜,该圆顶形状具有连续的弯曲面。此外,透光体2b能够使用各种各样的透镜。透光体2b例如是玻璃透镜。
[0382]
振动部3a使透光体2b振动。振动部3a具备压电元件6、振动体7以及固定部13。压电元件6和振动体7与实施方式1相同,因此省略说明。
[0383]
固定部13是将振动部3a固定于内层镜筒31的构件。固定部13在振动装置206中包括至少一个共振频率的振动节点的位置处与内层镜筒31连接。在本说明书中,“振动节点”是指透光体2b的最大振幅的1/100以下的部分。
[0384]
例如,固定部13具有圆筒形状。具体来说,固定部13具有筒状固定体13a和板簧部13b。
[0385]
筒状固定体13a具有圆筒形状,固定于内层镜筒31。例如,筒状固定体13a借助第1接合部14与内层镜筒31连接。后面对第1接合部14进行说明。此外,筒状固定体13a也可以与内层镜筒31直接连接。
[0386]
板簧部13b从筒状固定体13a向配置有透光体2b的一侧延伸,与振动体7连接。板簧部13b从振动体7的外表面沿z方向延伸,且在壳体11a侧沿y方向弯曲。板簧部13b的厚度比筒状固定体13a的厚度(z方向上的尺寸)小。板簧部13b吸收振动体7的振动,抑制振动向筒状固定体13a传递。具体来说,当板簧部13b接收来自振动体7的振动时,通过弹性变形而吸收振动。
[0387]
在实施方式7中,固定部13与振动体7一体地形成。此外,固定部13也可以不与振动体7一体地形成,也可以由与振动体7分体的构件形成。
[0388]
内层透镜30由配置于振动装置206的内部的多个透镜构成。内层透镜30配置于振动部3a的内部,并且配置于透光体2b和摄像部12的光路上。内层透镜30由内层镜筒31保持。
[0389]
内层镜筒31是保持内层透镜30的构件。内层镜筒31具备透镜保持部31a和凸缘部31b。内层镜筒31例如由金属形成。
[0390]
透镜保持部31a是保持内层透镜30的筒状的构件。透镜保持部31a例如具有圆筒形状,该圆筒形状具有一端和另一端。配置有透光体2b的一侧是透镜保持部31a的一端,配置有摄像部12的一侧是透镜保持部31a的另一端。在透镜保持部31a的一端侧和另一端侧,在内壁设有突起,利用该突起来保持收纳于透镜保持部31a的内部的内层透镜30。
[0391]
凸缘部31b是从透镜保持部31a的另一端向外周方向延伸的板状的构件。凸缘部31b例如具有圆环板状。凸缘部31b在振动装置206中包括至少一个共振频率的振动节点的位置处与振动部3a和壳体11a连接。
[0392]
凸缘部31b在凸缘部31b的上表面借助第1接合部14与固定部13的筒状固定体13a连接。另外,凸缘部31b在凸缘部31b的下表面借助第2接合部15与壳体11a的外表面连接。另外,第1接合部14与第2接合部15从y方向观察时重叠。此外,凸缘部31b的上表面是指配置有透光体2b的一侧的面,凸缘部31b的下表面是指配置有壳体11a的一侧的面。
[0393]
在实施方式7中,第1接合部14和第2接合部15设于“振动装置206中包括至少一个
共振频率的振动节点的位置”。因此,在第1接合部14和第2接合部15处,在振动装置206中振动部3a的振动不易传递。
[0394]
第1接合部14和第2接合部15例如由uv固化型的环氧粘接剂、加热固化型的环氧粘接剂、两液混合固化型的环氧粘接剂、丙烯酸类粘接剂、聚氨酯类粘接剂或玻璃料等接合材料形成。第1接合部14和第2接合部15例如形成为环状。此外,也可以在第1接合部14和第2接合部15的局部设有缺口。缺口可以用于供与压电元件6连接的电气配线等穿过。或者,第1接合部14和第2接合部15例如也可以由防水构件形成。
[0395]
第1接合部14和第2接合部15也可以是调节内层镜筒31的对准的部分。具体来说,可以通过调节第1接合部14和第2接合部15的厚度(z方向上的长度),来调节内层镜筒31的位置。通过调节内层镜筒31的位置,能够调节内层透镜30相对于透光体2b的位置。
[0396]
第1接合部14和第2接合部15优选由杨氏模量为1gpa以上的接合材料形成。在实施方式7中,第1接合部14和第2接合部15例如由杨氏模量为1gpa以上的uv固化型的环氧粘接剂形成。由此,能够兼顾来自振动部3a的振动传递的抑制与透光体2b和内层镜筒31的高精度对准。例如在由橡胶等吸收振动的构件形成第1接合部14和第2接合部15的情况下,虽然能够抑制振动的传递,但难以实现透光体2b与内层镜筒31的高精度对准。另一方面,在用比较硬的构件形成第1接合部14和第2接合部15的情况下,虽然能够进行高精度对准调节,但难以实现振动传递的抑制。
[0397]
[关于振动分析]
[0398]
图43是表示本发明的实施方式7的摄像单元104的振动分析的模拟结果的一例的图。此外,振动分析使用murata software株式会社制的femtet来进行压电分析(共振分析)。施加于压电元件6的电压为20v。作为压电元件6的边界条件,将一端设为20v,将另一端设为0v。另外,图43用白色和黑色的深浅表示振动振幅的大小,示出了颜色越接近白色则振动越大,颜色越接近黑色则振动振幅越小。
[0399]
如图43所示,在振动装置206中,透光体2b、压电元件6以及振动体7的振幅较大,可知正在振动。另一方面,内层透镜30、内层镜筒31以及壳体11a与透光体2b、压电元件6以及振动体7相比振幅较小,可知几乎不振动。
[0400]
当着眼于固定部13附近时,可知板簧部13b正在吸收振动,因此振动不易向筒状固定体13a传递。另外,可知在振动装置206中包括共振频率的振动节点的位置处,筒状固定体13a借助第1接合部14与内层镜筒31连接,内层镜筒31借助第2接合部15与壳体11a连接。
[0401]
[效果]
[0402]
根据实施方式7的振动装置和摄像单元,能够起到以下的效果。
[0403]
实施方式7的振动装置206具备透光体2b、振动部3a、内层透镜30以及内层镜筒31。透光体2b由配置于最外层的透镜构成。振动部3a使透光体2b振动。振动部3a具有压电元件6、振动体7以及固定部13。压电元件6通过被施加电压而振动。振动体7配置于压电元件6,将压电元件6的振动放大并向透光体2b传递。固定部13与振动体7连接,并且与内层镜筒31连接。内层透镜30配置于透光体2b的光路上,并且保持于内层镜筒31。内层镜筒31保持内层透镜30,并且与固定部13连接。固定部13与内层镜筒31在振动装置206中包括至少一个共振频率的振动节点的位置处连接。
[0404]
根据这样的结构,能够在使透光体2b振动的同时抑制内层透镜30的振动。即,在将
在作为配置于最外层的透镜的透光体2b附着的液滴去除的情况下,能够在抑制内层透镜30振动的同时使透光体2b振动。
[0405]
固定部13与内层镜筒31借助第1接合部14连接。根据这样的结构,通过调节形成于固定部13与内层镜筒31之间的第1接合部14的厚度,能够调节内层透镜30相对于透光体2b的位置。由此能够提高透光体2b与内层透镜30的对准精度。
[0406]
第1接合部14是杨氏模量为1gpa以上的接合材料。根据这样的结构,能够兼顾透光体2b与内层透镜30的对准精度的提高与振动的抑制。
[0407]
固定部13具有筒状固定体13a和板簧部13b。筒状固定体13a与内层镜筒31连接。板簧部13b从筒状固定体13a向配置有透光体2b的一侧延伸,与振动体7连接。板簧部13b的厚度比筒状固定体13a的厚度(z方向上的长度)小。根据这样的结构,板簧部13b吸收振动体7的振动,从而能够抑制振动体7的振动向筒状固定体13a传递。另外,在筒状固定体13a附近容易形成振动节点。
[0408]
摄像单元104具备壳体11a、摄像部12以及振动装置206。壳体11a具有筒形状,该筒形状具有端部,将摄像部12收纳于壳体11a的内部。振动装置206与壳体11a的端部连接。振动装置206与壳体11a在振动装置206中包括至少一个共振频率的振动节点的位置处连接。根据这样的结构,与上述的振动装置206的效果同样地,能够在使透光体2b振动的同时抑制内层透镜30的振动。
[0409]
振动装置206的固定部13与壳体11a借助第2接合部15连接。根据这样的结构,通过调节形成于固定部13与壳体11a之间的第2接合部15的厚度,能够调节摄像部12相对于内层透镜30的位置。由此能够提高内层透镜30与摄像部12的对准精度。
[0410]
第1接合部14和/或第2接合部15由防水构件形成。根据这样的结构,能够确保防水性。
[0411]
固定部13和内层镜筒31由金属形成。根据这样的结构,能够提高激励的效率。
[0412]
透光体2b由玻璃透镜形成。根据这样的结构,能够提高激励的效率。
[0413]
此外,在实施方式7中对第1接合部14在振动装置206中包括至少一个共振频率的振动节点的例子进行了说明,但不限定于此。例如第1接合部14也可以在振动装置206中包括多个共振频率的振动节点。
[0414]
在实施方式7中对第2接合部15在振动装置206中包括至少一个共振频率的振动节点的例子进行了说明,但不限定于此。例如第2接合部15也可以在振动装置206中包括多个共振频率的振动节点。
[0415]
在实施方式7中对第1接合部14由接合材料形成的例子进行了说明,但不限定于此。第1接合部14也可以是固定部13与内层镜筒31能够直接连接的构造。例如,第1接合部14也可以通过利用螺钉等机构连接固定部13与内层镜筒31的结构来实现。在该情况下,可以在固定部13的筒状固定体13a的内侧设置内螺纹,并在内层镜筒31的外周设置外螺纹。根据这样的结构,固定部13与内层镜筒31的连接变得容易,并且内层透镜30与透光体2b的对准调节也变得容易。
[0416]
在实施方式7中对第2接合部15由接合材料形成的例子进行了说明,但不限定于此。第2接合部15也可以是内层镜筒31与壳体11a能够直接连接的构造。例如第2接合部15也可以通过利用螺钉等机构连接内层镜筒31与壳体11a的结构来实现。在该情况下可以是,在
具有筒形状的壳体11a的内侧设有内螺纹,在内层镜筒31的外周设有外螺纹。根据这样的结构,内层镜筒31与壳体11a的连接变得容易,并且内层透镜30与摄像部12的对准调节也变得容易。
[0417]
在实施方式7中对振动部3a与内层镜筒31为分体的例子进行了说明,但不限定于此。振动部3a与内层镜筒31也可以一体地形成。这样,通过一体成型能够提高精度。
[0418]
在实施方式7中对透光体2b是具有连续的弯曲面的圆顶状的透镜的例子进行了说明,但不限定于此。透光体2b也可以是在至少一部分具有弯曲面的透镜。或者,透光体2b也可以是具有平坦面的透镜。
[0419]
在实施方式7中对连接有振动装置206的摄像单元104的例子进行了说明,但不限定于此。图44是振动装置206的一例的概略剖视图。如图44所示,振动装置206也可以单独地实施。例如,振动装置206也可以单独地制造和销售。另外,振动装置206还可以用于摄像单元104以外的装置。
[0420]
在实施方式7中对振动装置206具备内层透镜30和内层镜筒31的例子进行了说明,但不限定于此。在振动装置206中,内层透镜30和内层镜筒31也可以不是必需的结构。图45是振动装置的另一例的概略剖视图。如图45所示,振动装置207也可以不具备内层透镜30和内层镜筒31。
[0421]
在实施方式7中对固定部13与内层镜筒31的凸缘部31b连接的例子进行了说明,但不限定于此。例如固定部13也可以与内层镜筒31的透镜保持部31a连接。
[0422]
(变形例)
[0423]
图46是本发明的实施方式7的变形例的振动装置208的概略剖视图。如图46所示,在振动装置208中与实施方式7的振动装置206的不同点在于,固定部13a与内层镜筒31的透镜保持部31a连接。另外,在振动装置208中与实施方式7的振动装置206的不同点还在于,内层镜筒31不具备凸缘部31b。
[0424]
在振动装置208中,在构成振动部3b的振动体7a设有与固定部13a连接的连接部7d。连接部7d设于筒状体7a与圆环板状部7b之间。连接部7d具有筒形状。连接部7d的厚度(z方向上的长度)比筒状体7a的厚度(z方向上的长度)小。在振动装置208中,在连接部7d附近形成有共振频率的振动节点。
[0425]
固定部13a具有第1固定体13c和第2固定体13d。
[0426]
第1固定体13c从振动部3b的连接部7d的内侧朝向内层镜筒31的透镜保持部31a延伸,与内层镜筒31连接。第1固定体13c形成为圆环板状。第1固定体13c与振动部3b和内层镜筒31一体地形成。
[0427]
在振动装置208中,在形成有共振频率的振动节点的连接部7d附近,第1固定体13c与内层镜筒31连接。
[0428]
第2固定体13d是向振动部3b的连接部7d的外侧延伸且向壳体11a侧弯折的构件。第2固定体13d形成为筒状,与壳体11a连接。第2固定体13d与振动部3b一体地形成。另外,第2固定体13d借助第2接合部15与壳体11a连接。
[0429]
振动装置208包括多个共振频率的振动节点。具体来说,振动装置208在透光体2b与压电元件6之间的连接部7d附近的位置和固定部13a与壳体11a连接的位置处形成有振动节点。
[0430]
在振动装置208中,第1固定体13c在振动装置208中的共振频率的振动节点的位置处与内层镜筒31连接。由此能够抑制振动部3b的振动向内层镜筒31传递。另外,在振动装置208中,第2固定体13d在振动装置208中的共振频率的振动节点的位置处与壳体11a连接。由此能够抑制振动部3b的振动向壳体11a传递。
[0431]
图47是表示图46的振动装置208的振动分析的模拟结果的一例的图。此外,振动分析使用murata software株式会社制的femtet来进行压电分析(共振分析)。施加于压电元件6的电压为20v。作为压电元件6的边界条件,将一端设为20v,将另一端设为0v。另外,图47用白色和黑色的深浅表示振动振幅的大小,示出了颜色越接近白色则振动越大,颜色越接近黑色则振动振幅越小。
[0432]
如图47所示,在振动装置208中,透光体2b、压电元件6以及振动体7a(除了连接部7d以外)的振幅较大,可知正在振动。另一方面,连接部7d、内层透镜30以及内层镜筒31与透光体2b、压电元件6以及振动体7a(除了连接部7d以外)相比振幅较小,可知几乎不振动。
[0433]
另外可知,在振动装置208中的形成有共振频率的振动节点的位置处,第1固定体13c与内层镜筒31连接。
[0434]
此外,在振动装置208中,对第1固定体13c与内层镜筒31一体地形成的例子进行了说明,但不限定于此。第1固定体13c与内层镜筒31也可以借助第1接合部14连接。例如第1接合部14也可以具有利用螺钉等机构连接第1固定体13c与内层镜筒31的结构。在该情况下,可以在第1固定体13c的端部设置内螺纹,并在内层镜筒31的透镜保持部31a的外周设置外螺纹。根据这样的结构,能够进行使内层镜筒31相对于第1固定体13c在y方向上移动的位置调节,因此能够容易地调节内层透镜30相对于透光体2b的位置。由此能够提高透光体2b与内层透镜30的对准精度。
[0435]
虽然参照附图与优选的实施方式关联地充分记载了本发明,但对于本领域技术人员来说各种变形、修改都是显而易见的。应理解为,那样的变形、修改只要不脱离由权利要求书限定的本发明的范围,就包含在本发明中。
[0436]
产业上的可利用性
[0437]
本发明的振动装置和振动控制方法能够应用于在室外使用的车载照相机、监视照相机或lidar等光传感器。
[0438]
附图标记说明
[0439]
2、2a、2b、透光体;3、3a、3b、振动部;4、控制部;5、供电导体;6、压电元件;7、7a、振动体;7a、筒状体;7b、圆环板状部;7c、薄壁部;7d、连接部;8、风机装置;9、喷出装置;10、位移检测传感器;11、11a、壳体;11a、底板;12、摄像部;12a、主体构件;13、13a、固定部;13a、筒状固定体;13b、板簧部;13c、第1固定体;13d、第2固定体;14、第1接合部;15、第2接合部;20、20a、防水涂层;21、突起;30、内层透镜;31、内层镜筒;31a、透镜保持部;31b、凸缘部;50、液滴;51、固体;60、60a、液滴;61、液体;62、异物;81、配管;82、风机头;83、泵;84、流路;91、配管;92、喷出头;93、泵;94、流路;100、101、102、103、104、摄像单元;200、201、202、203、204、205、206、207、208、振动装置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。