1.本发明涉及氢能源领域和动力船艇的高级辅助驾驶领域,特别是涉及一种基于氢燃料电池技术的高级辅助驾驶动力艇。
背景技术:
2.本发明涉及氢能源领域和动力船艇的高级辅助驾驶领域,将氢能源这一清洁能源应用到动力船艇。2018年4月国际海事组织(imo)制定了海运温室气体减排初步战略要求:与2008年相比,在2030年船舶二氧化碳排放量至少降低40%,到2050年降低50%以上;从2020年起,全球船舶所用燃油硫含量不得超过0.5%,硫氧化物排放控制区域(seca)硫含量不超过0.1%。2018年11月,交通运输部颁布《船舶大气污染物排放控制区实施方案》,划定了中国境内排放控制区域,明确规定2020年1 月1日起,船舶进入排放控制区应使用硫含量不大于0.1%的船用燃油。
3.氢燃料电池是将氧气与氢气的化学能转换成电能的发电装置,生成物为水,具有高效、无污染、设备运行噪音低等特点。船舶采用氢燃料电池推进方案是其满足新法规要求的主要措施之一。
4.现有技术中,动力艇的驱动主要采用内燃机,内燃机将燃料和空气混合后在气缸内燃烧,释放出的热能使气缸内产生高温高压的燃气,燃气膨胀推动活塞运动,再通过曲柄连杆机构或其他机构将机械功输出,驱动叶轮设备工作。这个过程不断重复,实现动力艇驱动,但是随着人们对环保要求的提高,内燃机驱动方式的排放已满足不了人们对环保的要求。因为燃料电池是一种将燃料与氧化剂通过电解质将其化学能直接转化为电能的装置。燃料电池的电极本身不包含活性储能物质,只是催化转化元件,并且燃料电池常见的排放物为水,具有高效、无污染等特点,因此氢燃料在动力艇上的应用前景巨大。
技术实现要素:
5.为了解决动力艇的驱动主要采用内燃机,内燃机将燃料和空气混合后在气缸内燃烧,释放出污染气体污染空气的问题,本发明的目的是提供一种基于氢燃料电池技术的高级辅助驾驶动力艇。
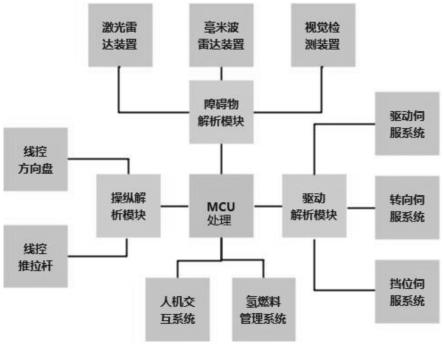
6.为了实现上述目的,本发明采用如下技术方案:一种基于氢燃料电池技术的高级辅助驾驶动力艇,包括有mcu处理,所述mcu处理为单片机,用于进行监控监测和控制各个子模块的运行状态,所述mcu处理连接有障碍物解析模块,用于接收障碍物解析模块的解析数据,且根据解析数据做出决策,所述障碍物解析模块分别连接有激光雷达装置、毫米波雷达装置和视觉检测装置,用于解析分析激光雷达、毫米波雷达和视觉检测装置的数据并给出结构化分析结果,所述mcu处理还连接有操纵解析模块,用于接收操纵解析模块的解析数据,所述操纵解析模块分别连接有线控方向盘和线控推拉杆,用于解析线控方向盘和线控推拉杆采集的数据,所述mcu处理还连接有驱动解析模块,用于接收驱动解析模块的运行数据,且亦用于向驱动解析模块传输驱动指令,所述接收驱动解析模块还分别连接有驱动伺
服系统、转向伺服系统和挡位伺服系统,用于向驱动伺服系统、转向伺服系统和挡位伺服系统传输驱动指令,亦用于接收驱动伺服系统、转向伺服系统和挡位伺服系统运行数据,所述mcu处理还连接有人机交互系统和氢燃料管理系统。
7.优选的,所述激光雷达装置用于探测中短距离障碍物信息,经过障碍物解析模块处理后输出障碍物距离及轮廓数据,供mcu处理决策用;所述毫米波雷达装置主要用于探测中长距离障碍物信息,经过障碍物解析模块处理后输出障碍物距离及速度信息,供mcu处理决策用;所述视觉检测装置主要用于探测短距离障碍物信息,由于视觉检测装置受环境光影响较大,其作为激光雷达装置的辅助检测手段,提供近距离障碍物更多的纹理、形状和分类等信息,以供mcu 处理决策用。
8.优选的,所述所述线控方向盘用于采集船用驾驶方向的角度采集;所述线控推拉杆用于挡位和油门位置采集。
9.优选的,所述驱动伺服系统由大功率伺服电机、伺服驱动器和水冷系统构成,用于接收驱动解析模块的指令并将带动喷泵的叶轮旋转,从而驱动动力艇前进和后退;所述转向伺服系统由交流伺服电机及其伺服驱动器构成,用于接收驱动解析模块的指令并将带动喷泵矢量喷口转动,从而实现动力艇的转向动作;所述挡位伺服系统由交流伺服电机及其伺服驱动器构成,用于接收驱动解析模块的指令并将带动喷泵翻斗转动,从而实现动力艇的空挡、前进挡和倒挡的切换。
10.优选的,所述人机交互系统包括动力开关、仪表和一个高分辨率触摸显示屏,动力开关用于开断电源和紧急停机等操作;仪表用于实时显示驱动伺服电机的转速和温度等状态;触摸显示屏用于用户进行参数配置和高级辅助驾驶的状态显示。
11.优选的,所述氢燃料管理系统属于氢燃料电池的一部分,主要用于氢燃料电池的运行实时状态和mcu处理的交互,用于启停、监控、控制氢燃料电池。
12.与现有技术相比,本发明实现的有益效果:本发明基于氢燃料电池,以mcu 处理的控制系统,使得氢燃料动力艇更安全、更清洁环保、更高效,氢燃料管理系统通过氢燃料电池负责给各个系统供电;操纵解析模块负责采集线控方向盘和线控推拉杆信号并给出指令,驱动解析模块用于接收挡位和转向指令并解析出控制指令传送给驱动伺服系统和转向伺服系统,驱动伺服系统和转向伺服系统负责接收指令并输出动力到动力挺的喷泵,障碍物解析模块负责采集分析障碍物信息并发送给mcu处理,mcu处理负责整个动力艇的集中控制,人机交互系统负责实时展示动力艇个装置运行状态、障碍物信息、声光报警及运行时参数的设置和动作执行。
附图说明
13.以下结合附图和具体实施方式来进一步详细说明本发明:
14.图1为本发明的整体的结构示意图;
15.图2为本发明的激光雷达的主要辅助驾驶控制逻辑的示意图;
16.图3为本发明的毫米波雷达的主要辅助驾驶控制逻辑的示意图。
具体实施方式
17.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明
书所揭露的内容轻易地了解本发明的其他优点及功效。
18.请参阅图1至图3。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
19.实施例1:
20.一种基于氢燃料电池技术的高级辅助驾驶动力艇,包括有mcu处理,所述 mcu处理为单片机,用于进行监控监测和控制各个子模块的运行状态,所述 mcu处理连接有障碍物解析模块,用于接收障碍物解析模块的解析数据,且根据解析数据做出决策,所述障碍物解析模块分别连接有激光雷达装置、毫米波雷达装置和视觉检测装置,用于解析分析激光雷达、毫米波雷达和视觉检测装置的数据并给出结构化分析结果,所述mcu处理还连接有操纵解析模块,用于接收操纵解析模块的解析数据,所述操纵解析模块分别连接有线控方向盘和线控推拉杆,用于解析线控方向盘和线控推拉杆采集的数据,所述mcu处理还连接有驱动解析模块,用于接收驱动解析模块的运行数据,且亦用于向驱动解析模块传输驱动指令,所述接收驱动解析模块还分别连接有驱动伺服系统、转向伺服系统和挡位伺服系统,用于向驱动伺服系统、转向伺服系统和挡位伺服系统传输驱动指令,亦用于接收驱动伺服系统、转向伺服系统和挡位伺服系统运行数据,所述mcu处理还连接有人机交互系统和氢燃料管理系统。
21.所述激光雷达装置用于探测中短距离障碍物信息,经过障碍物解析模块处理后输出障碍物距离及轮廓数据,供mcu处理决策用;所述毫米波雷达装置主要用于探测中长距离障碍物信息,经过障碍物解析模块处理后输出障碍物距离及速度信息,供mcu处理决策用;所述视觉检测装置主要用于探测短距离障碍物信息,由于视觉检测装置受环境光影响较大,其作为激光雷达装置的辅助检测手段,提供近距离障碍物更多的纹理、形状和分类等信息,以供mcu处理决策用。
22.所述所述线控方向盘用于采集船用驾驶方向的角度采集;所述线控推拉杆用于挡位和油门位置采集。
23.所述驱动伺服系统由大功率伺服电机、伺服驱动器和水冷系统构成,用于接收驱动解析模块的指令并将带动喷泵的叶轮旋转,从而驱动动力艇前进和后退;所述转向伺服系统由交流伺服电机及其伺服驱动器构成,用于接收驱动解析模块的指令并将带动喷泵矢量喷口转动,从而实现动力艇的转向动作;所述挡位伺服系统由交流伺服电机及其伺服驱动器构成,用于接收驱动解析模块的指令并将带动喷泵翻斗转动,从而实现动力艇的空挡、前进挡和倒挡的切换。
24.所述人机交互系统包括动力开关、仪表和一个高分辨率触摸显示屏,动力开关用于开断电源和紧急停机等操作;仪表用于实时显示驱动伺服电机的转速和温度等状态;触摸显示屏用于用户进行参数配置和高级辅助驾驶的状态显示。
25.所述氢燃料管理系统属于氢燃料电池的一部分,主要用于氢燃料电池的运行实时
状态和mcu处理的交互,用于启停、监控、控制氢燃料电池。
26.实施例2:
27.所述激光雷达装置主要用于终端距离障碍物识别,可识别障碍物的距离和形态等结构性参数。根据激光雷达装置测量的距离,设置了三段控制,阈值1 范围外不作动作,阈值1范围内采取声光报警警示驾驶船员,若驾驶船员没有采取任何动作,进入阈值2范围内,高级辅助驾驶系统将主动采取降速处理;进入阈值3范围内,驾驶船员依然没有人工介入,高级辅助驾驶系统将紧急停机,以迫使动力艇保持停止以免发生碰撞危险,激光雷达的主要辅助驾驶控制逻辑如图2所示。
28.实施例3:
29.所述毫米波雷达装置除了提供距离障碍物的距离信息,还可提供障碍物的速度信息,以供高级辅助驾驶系统决策用。除了在前述激光雷达根据距离作出三段安全防护措施,毫米波雷达还可根据动力艇行进速度与障碍物速度的关系进行避障处理,当动力艇速度低于障碍物行进速度时,不作任何处理;当动力艇速度高于障碍物行进速度并在三段安全防护距离范围内,将采取降速或紧急停机处理,毫米波雷达的主要辅助驾驶控制逻辑如图3所示。
30.实施例4:
31.视觉检测装置的主要辅助驾驶控制逻辑与激光雷达装置的辅助驾驶控制逻辑类似,但视觉检测装置将障碍物类型分类更细,如人、船、水面漂浮物、岸边等障碍物进行结构化识别,进而可进行可视化展示,障碍物更细的分类将有助于人工及时敏锐的介入动力艇的操控之中。
32.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
