一种自动取送药的agv小车及其控制系统和自动取送药方法
技术领域
1.本发明涉及运输设备技术领域,特别是涉及一种自动取送药的agv小车及其控制系统和自动取送药方法。
背景技术:
2.随着科技的发展,agv凭借着其极其高效的以及非常高柔性的物料运输能力在国内大量的使用,例如:物流,码头,烟草等领域。由于agv是不需要人工或是仅通过极少的人工操作就可以进行自动物料运输的小车,故很符合当下智能制造的趋势。
3.如今的医院智能化水平较高,但是大多都是软件与互联网的结合,方便人们挂号与缴费,但是在病人取药和医生送药过程缺乏智能化设备。大多数医院面对病人看病,尤其时老年人、不识字或身体不适的病人等,解决方法大多是在现场挂号机器周围安排相关人员帮助这些病人挂号。可是面对取药过程,这些病人很少得到有效的帮助,一般通过询问路人的方式,根据别人模糊的指点,自行寻找,所以对于这些人取药过程是一个费事费力的过程。
4.第二,挂号机周围的人工服务,在高峰期也十分拥堵。取药环节也是如此,由于取药流程需要排队,可是存在不熟悉流程或其他原因未能即使前往取药处的病人,处方未能及时送达,容易产生拥挤。取药人员十分忙碌,导致医务人员取药的整体效率降低,面对大量的病人的处方,可能会导致药品错发漏发的问题。
5.第三,如今一些医院接受很多志愿者,用于服务这些人群。取药过程,通过志愿者的带路和帮助,可以很好的提高病人取药效率,取药人员在志愿者的纪律维持下,也能够更好的工作,效率也可以保持很高的状态。但是志愿者的介入不是长时间连续的,医院会存在没有志愿者帮助的时间间隙,如果医院使用人工长期连续帮助病人取药,就会产生很大的经济负担。
6.如今5g技术的快速发展,可以更好的做到人机交互,故研究一种自动取送药的agv小车及其控制系统和取送药方法,可以根据医生的处方,自动取药并送给病人,可以更好的解决医生和病人之间拿取药的问题,大大节约双方时间,同时大大节约人工费用,减少医院的运营成本。
技术实现要素:
7.本发明所要解决的技术问题是提供一种自动取送药的agv小车,通过互联网自动获取医生开具的处方,按照预设的行进路线自行行进到取药站点,取药站点的医生根据内部网络同步获取对应的取药信息并配备相应的药品,待agv小车到达后将药品放到对应的agv小车上,agv小车取药后将药品送至指定地点以供病人或者医护人员拿取药品,极大减少病人取药过程的等待时间,给病人提供便利。
8.为解决上述技术问题,本发明采用的一个技术方案是:提供一种自动取送药的agv小车,包括由下而上依次层叠的底层行走机构、中间车体机构和上层取药机构;
9.所述底层行走机构包括下车层、固定设置于下车层顶面上的竖直导杆、固定设置于下车层底部的电磁引导模块,所述下车层的底板上固定安装有多个对称分布的伺服电机,所述伺服电机的输出轴端传动连接有转动安装于下车层上的麦克纳姆轮;
10.所述中间车体机构包括中车层、分别固定安装于中车层内的下位控制器、can总线、充电模块、电池和逆变器,所述下位控制器与伺服电机电连接,电池通过逆变器与伺服电机连接;
11.所述上层取药机构包括上层车、固定安装于上层车内的丝杠传动机构、固定安装于丝杠传动机构的动力执行端上并活动嵌设于上层车顶部的托盘、固定设置于上层车的顶部并位于托盘一侧的上位控制器,所述上位控制器与下位控制器通过can总线电连接,且上位控制器通过无线网络与医院的处方管理系统远程连接;
12.所述中车层与下车层之间、上车层与中车层之间均通过弹簧卡扣机构可拆卸地连接,且中车层和上车层分别滑动套设于竖直导杆的外侧。
13.进一步的,所述下车层的四侧外壁上均固定设置有防撞条,所述防撞条内设置有至少一个与下位控制器连接的薄膜压力传感器。
14.进一步的,所述伺服电机的输出轴端固定安装有主动齿轮,所述麦克纳姆轮的轴端固定安装有与主动齿轮啮合传动的从动齿轮。
15.进一步的,所述上位控制器的一侧固定设置有与下位控制器电连接的激光雷达,上位控制器的另一侧固定设置有分别与下位控制器电连接的警报器和急停按钮。
16.还提供了一种应用于所述的自动取送药的agv小车的控制系统,该系统包括agv小车和分别设置于agv小车上的传感模块、控制模块、行走驱动模块和托盘升降驱动模块,所述控制模块包括上位控制器和下位控制器,且上位控制器与下位机控制器之间通过can总线连接,下位控制器分别与行走驱动模块、托盘升降驱动模块连接;
17.所述上位控制器用于接收操作人员手动输入的各种相关数据,且上位控制器内设置有5g网络通讯模块,用于远程接收医院的处方管理系统发送的数据和控制指令;
18.传感模块包括固定设置于agv小车顶部的激光雷达、固定设置于agv小车底部的电磁引导模块和设置于agv小车底部四周的薄膜压力传感器,所述激光雷达、电磁引导模块和薄膜压力传感器分别与下位控制器连接;
19.所述激光雷达检测agv小车周边环境状况并传递给下位控制器,下位控制器将数据传递至上位控制器,所述电磁引导模块与地面上铺设的磁条导轨相匹配,引导agv小车的行进方向,所述薄膜压力传感器感知agv小车行进过程中的受阻状况并传递给下位控制器;
20.上位控制器对接收到的数据和控制指令进行处理并决定相应的巡航策略发送至下位控制器,下位控制器根据巡航策略执行对应的程序以控制行走驱动模块和托盘升降驱动模块的运行状态。
21.进一步的,所述控制模块还包括与下位控制器连接的警报器。
22.进一步的,该系统还包括与上位控制器通过无线网络连接的移动终端,用于查询和接收药品的取送状态信息。
23.又提供了一种应用于所述的自动取送药的agv小车控制系统的取送药方法,主要包括以下步骤:
24.s10、医生在医院的处方管理系统完成处方的开具,医院的处方管理系统通过无线
网络将处方信息远程传送至上位控制器,上位控制器对接收到的信息进行处理,同时在触摸显示屏上显示对应的处方信息,agv小车由待机状态进入工作状态;
25.s20、激光雷达检测agv小车周围环境状态,并将检测信息发送至下位控制器,下位控制器将数据传递至上位控制器,上位控制器对接收到的数据和控制指令进行处理并决定相应的巡航策略发送至下位控制器,下位控制器根据巡航策略执行对应的程序,控制agv小车的行走驱动模块提供agv小车的行走动力;
26.s30、电磁引导模块与地面铺设的磁条导轨进行配对循迹,引导agv小车的行进方向,配合行走驱动模块驱动agv小车到达配药站点;
27.s40、agv到达配药站点后,电磁引导模块将位置信息反馈至下位控制器,下位控制器启动相应的控制程序,控制托盘升降驱动模块正向工作,使agv小车顶部的托盘升起至最高点,配药站点的医生根据内部网络提供的来自处方管理系统的相关取药信息配备对应的药品,并将药品放在托盘上,并在上位控制器的触摸显示屏上点击“确定”按钮;
28.s50、上位控制器接收到“确定”信息并处理后,将相应的控制指令发送至下位控制器,下位控制器根据控制指令执行对应的控制程序,控制托盘升降驱动模块反向工作,使agv小车顶部托盘下降复位,完成取药过程;
29.s60、agv小车重复执行步骤s20和步骤s30,以同样的方式将药品送至指定的取药地点,完成送药过程;病人或医护人员根据上位控制器的触摸显示屏上显示的药品信息或移动终端显示的agv小车编号,在对应的agv小车上拿取对应的药品,取药后在上位控制器的触摸显示屏上点击“完成”按钮;
30.s70、上位控制器接收到“完成”信息并处理后,将相应的控制指令发送至下位控制器,下位控制器根据控制指令执行对应的控制程序,控制行走驱动模块驱动agv小车行进至指定的等待区域,agv小车由工作状态转为待机状态。
31.进一步的,在步骤s20中,若激光雷达检测agv周围环境的状态为行人多,则对应为地面的磁条导轨上障碍较多,下位控制器控制行走驱动模块执行相应的控制程序,使agv小车减速避障;若激光雷达检测agv周围环境的状态为行人少,则对应为地面的磁条导轨上比较畅通,在步骤s30中,下位控制器根据电磁引导模块反馈的的位置信息,控制行走驱动模块执行相应的控制程序,调整agv小车的行进状态。
32.进一步的,在步骤s70中,agv小车在指定的等待区域可自动与充电装置对接,进行自动充电。
33.本发明的有益效果如下:
34.1.节约时间:本发明通过互联网实现医生处方信息的远程传送,采用vga小车自动接收取药信息,并自动到达取药站点完成取药,进而完成送药过程,病人或医护人员通过移动终端可及时查询取送药的进程,在指定地点直接拿取药品即可,取送药过程不需要人工,尤其避免了病人身体行动不便、对医院场所分布不熟等原因造成的取药不便的问题,也为医护人员给病人及时用药提供了便利;同时,自动化的取送药过程,为取药站点的医务人员节约了大量时间,医务人员只需要根据处方信息提前拿药,装车即可;
35.2.智能化:本发明通过采用互联网实现信息传送、agv小车自动取药送药、移动终端查询取送药进度等方式,将取药这一医院必须进行的过程进行信息化、智能化地处理,转化为agv小车自动取送药的方式,既解决了病人取药导致的拥堵、插队、迷路等问题,又极大
提升了取送药的效率,有效缓解病人取药过程的焦灼情绪,更有利于医院场地的秩序管理;
36.3.性价比高:本发明采用agv小车自动完成取药、送药的过程,替代现下取药过程需要配备一定数量的熟悉流程的人员对病人进行指引和帮助的模式,有效降低人工成本,且大大提高了医院的服务质量。
附图说明
37.图1为本发明agv小车的立体结构示意图;
38.图2为本发明agv小车移出上车层和下车层状态的立体结构示意图;
39.图3为本发明底层行走机构的俯视结构示意图;
40.图4为本发明底层行走机构的仰视结构示意图;
41.图5为本发明中间车体机构的俯视结构示意图;
42.图6为本发明agv小车上层取药机构的局部结构示意图;
43.图7为本发明弹簧卡扣机构的外部结构示意图;
44.图8为本发明弹簧卡扣机构的内部结构示意图;
45.图9为本发明上套筒的立体结构示意图;
46.图10为本发明agv小车的控制系统的系统组成框图;
47.图11为本发明agv小车取送药方法的流程示意图。
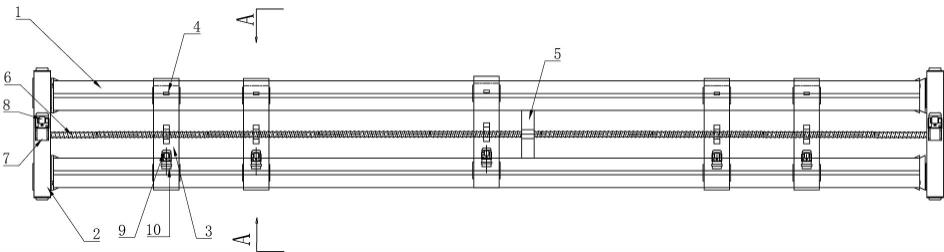
48.图中:1激光雷达、2上位控制器、3急停按钮、4防撞条、5警报器、6滚珠丝杠、7丝杠电机、8充电模块、9弹簧卡扣机构、顶部901、902上套筒、903下套筒、904末端、905上推杆、906分度爪、907滑槽、908滑爪套、909挡块、910弹簧、911下推杆、912滑条、10轴承、11主动齿轮、12伺服电机、13轴承支座、14麦克纳姆轮、15从动齿轮、16薄膜压力传感器、17上车层、18中车层、19下车层、20竖直导杆、21逆变器、22中心定位小孔、23电池、24can总线、25下位控制器、26滑轨、27滑块、28丝杠滑块、29电磁引导模块、30托盘。
具体实施方式
49.下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
50.请参阅图1至图9,一种自动取送药的agv小车,包括由下而上依次层叠的底层行走机构、中间车体机构和上层取药机构。
51.如图2至图4所示,底层行走机构包括下车层19、固定设置于下车层19顶面上的竖直导杆20、固定设置于下车层19底部的电磁引导模块29。其中,下车层19为顶部开口的方形箱体结构。下车层19的底板上通过螺栓连接固定安装有四个两两对称分布的伺服电机12,伺服电机的输出轴端传动连接有转动安装于下车层19上的麦克纳姆轮14。具体的,下车层19的底板上开设有位于伺服电机12一侧的通孔,通孔的两端固定设置有带有轴承10的轴承支座13,麦克纳姆轮14位于通孔内,使其圆周面底端位于下车层19底面的下方,且麦克纳姆轮14的两轴端固定套接于轴承10的内圈中。伺服电机12的输出轴端固定安装有主动齿轮11,麦克纳姆轮14的轴端固定安装有与主动齿轮11啮合传动的从动齿轮15。本实施例中,主动齿轮11和从动齿轮15采用圆柱斜齿轮。通过四个伺服电机12之间的协作运行,驱动四个麦克纳姆轮14实现运动或停止的配合,从而实现agv小车整体的前进、后退、转弯以及加减
速功能,实现多方位多角度的运动。
52.电磁引导模块29固定在小车底部,主要与地面上铺设的磁条导轨进行配对,用来满足小车的行动轨迹的需求,从而实现agv小车行动轨迹及位置点的精确控制。优选的,下车层19的四侧外壁上均粘结固定设置有防撞条4,防撞条4内设置有一对(两块)薄膜压力传感器16。在agv小车行进过程中,如遇到障碍物,防撞条4可起到缓冲保护作用,同时薄膜压力传感器16受挤压力作用后产生感应信号,控制四个伺服电机12暂停工作。
53.如图5所示,中间车体机构包括中车层18、分别通过螺栓连接固定安装于中车层18内的下位控制器25、can总线24、充电模块8、电池23和逆变器21,下位控制器25与伺服电机12电连接,电池23通过逆变器21与伺服电机12连接。电池23采用可充电的锂电池组,为agv小车整个设备的用电器件提供电力。充电模块8包括设置于中车层18外壁内的充电插口和内置与中车层18侧壁内充电插头,agv小车在指定的等待区域可自动与充电装置对接,对电池23进行自动充电;设备管理人员也可通过将充电插头插接于市电插座内对电池23进行充电。逆变器21则将电池23的直流电转变为交流电以供伺服电机12的驱动使用。
54.如图6所示,上层取药机构包括上层车17、固定安装于上层车17内的丝杠传动机构、固定安装于丝杠传动机构的动力执行端上并活动嵌设于上层车17顶部的托盘30、固定设置于上层车17的顶部并位于托盘一侧的上位控制器2。本实施例中,上位控制器2采用带有无线网卡的pc机,具体为带有触摸显示屏的平板电脑,可通过医院内部的无线网络与医院的处方管理系统远程连接,以实现信息收发。上位控制器2的触摸显示屏作为人机交互模块,可显示相应的人机交互界面,在界面上显示上位控制器2接收自医院的处方管理系统发出的处方信息,并设置有“确认”按键和“完成”按键,分别供取药站点的医生完成取药时的确认操作和送药站点的病人取药时的确认操作。本实施例中,下位控制器25采用单片机为控制核心的通用控制组件,通过can总线24与上位控制器2连接,接收来自上位控制器2的控制指令,进而选择运行对应的控制程序,以驱动伺服电机12执行相应的动作。
55.上位控制器2的一侧固定设置有与下位控制器25电连接的激光雷达1,上位控制器2的另一侧固定设置有分别与下位控制器25电连接的警报器5和急停按钮3。激光雷达1用于实时监测agv小车周围的环境状况,并传送给下位控制器25,下位控制器根据激光雷达1传送的监测数据判断小车行进过程中障碍物的多少,进而选择执行相应的控制程序,从而实现伺服电机12的运动控制。警报器5主要用于agv小车行进遇到障碍而无法正常继续运行时,发出警示信息,以提示工作人员及时进行干预处理,以及小车到达取药站点时,提示医生进行药品的配备和放置。急停按钮3则用于agv小车内部控制程序出现错误时的紧急断电制动。
56.如图2所示,丝杠传动机构包括固定安装于上车层17右后方内壁上的丝杠电机6和通过联轴器固定连接于丝杠电机7输出轴端的滚珠丝杠6。上车层17的右侧侧壁的顶部一体设置有立板,立板的顶端固定连接有水平安装板,上车层17的内壁上固定安装有位于水平安装板正下方的轴承座,滚珠丝杠6的两端分别通过轴承转动安装于水平安装板和轴承座内。滚珠丝杠6上螺纹套接有丝杠滑块28,丝杠滑块28的侧面与托盘30的外壁通过螺栓紧固连接。通过丝杠电机7驱动滚珠丝杠6转动,进而可通过螺纹传动,驱动丝杠滑块28上升或下降,从而实现托盘30的上升或下降。上车层17的前端左、右两侧侧内壁上均通过螺栓连接固定安装有垂向设置的滑轨26,滑轨26上套接有滑块27,滑块27的侧面通过螺栓与托盘30的
前侧外壁紧固连接,从而可对托盘30的上升或下降过程起到导向作用。
57.中车层18与下车层19之间、上车层17与中车层18之间均通过弹簧卡扣机构9可拆卸地连接,且中车层18和上车层17分别滑动套设于竖直导杆的外侧。本实施例中,竖直导杆20焊接固定于下车层19底板顶面中心处,上车层17的底板上和中车层18的底板上均对应开设有定位孔22,中车层18和上车层17依次通过定位孔22套设在竖直导杆20上,实现中车层18和上车层17水平方向的位移约束。同时,上车层17、中车层18均为与下车层19外形相匹配的方形箱体结构,下车层19的外壁顶部、中车层18的外壁顶端均设置有套接外台阶,中车层18的内壁底端、上车层17的内壁底端均设置有套接内台阶,通过套接外台阶与套接内台阶的配合,使中车层18扣接在下车层19的顶部、上车层17扣接在中车层18的顶部,实现中车层18和上车层17水平方向上的旋转约束,且上车层17、中车层18和下车层19的四侧侧面平齐,整体上形成立方体结构。
58.如图7至图9所示,弹簧卡扣机构9为弹簧销结构,包括末端904、固定于末端904一侧的下套筒903、螺纹连接于下套筒903外侧的上套筒902、活动套设于上套筒902内的上推杆905、固定于上推杆905外侧端部的顶部901、活动套设于下套筒903内的下推杆911。上推杆905位于上套筒902内的一端固定连接有分度爪906,下推杆911位于上套筒902内的一端固定连接有与分度爪906相匹配的滑爪套908,分度爪906和滑爪套908的外圆面上均开设有三条与轴线平行的滑槽907,上套筒902的内壁上一体设置有三个与滑槽907相对应的滑条912,使得分度爪906和滑爪套908可在上套筒902内沿轴线方向滑动。如图9所示,滑条912位于上套筒902的内壁中部,使得上套筒902内壁两端均为连续的圆周面。下推杆911上套接有弹簧910,弹簧910的一端固定连接在下套筒903的内壁上,另一端连接于固定设置在下推杆911上的挡块909上。
59.当顶部901受外力压迫作用时,分度爪906和滑爪套908在滑槽907的作用下,一同向右侧滑动而不会产生相对转,弹簧910被压缩;当滑爪套908与分度爪906相接触的面在按压的作用下到达滑条912的最右端后,解除外力,在弹簧910恢复弹力的作用下,滑爪套908会向左移动,由于滑爪套908与分度爪906相接触的面是斜面结构,滑爪套908向左移动并与滑条912右端临界点接触之后,在滑条912的端面与滑爪套908斜面的楔形力作用下,滑爪套908发生转动,并与分度爪906相对转动一个分度角;此时,滑爪套908的滑槽907与上套筒902内的滑条912错开一个分度角,滑爪套908则被卡在滑条912上,从而使得上推杆905可以在上套筒902内自由移动,呈现一个压缩松弛的状态。在松弛状态下再次施加外力按压之后,其内部构件的运动状态和弹出状态之前的按压过程相同,但松开时却有些区别,此时滑爪套908再次转动一个分度角,滑爪套908上的滑槽907与上套筒902内的滑条912处于导通状态,在弹簧910的作用下,滑爪套908会直接沿着滑条912向左运动,直至将上推杆905推出到上套筒902的端部后限位静止,上推杆905呈现伸长弹出的状态。根据前述操作,通过按压上推杆905,则可实现上推杆95在伸长弹出状态和压缩松弛状态之间转变。
60.具体使用时,如图3所示,在中车层18的侧壁上开设与顶部901相匹配的限位孔,将两个弹簧卡扣机构9水平地对称设置在上车层17的四侧,并通过螺栓连接将末端904固定在上车层17的外壁上,将上车层17扣合在中车层18顶部上时,中车层18的内壁对顶部901施加压力使上推杆905处于压缩松弛状态;上车层17与中车层18扣合到位后,顶部901正好位于限位孔的内侧,透过限位孔对顶部901施加压力后,可使上推杆905处于伸长弹出状态,从而
使顶部901插入限位孔内,从而实现上车层17与下车层18在垂直方向上的连接和约束。采用相同的方式,可实现上车层17与中车层18的分离,便于内部结构的维修和更换。中车层18采用相同的连接方式开拆卸地扣合在下车层19的顶部。
61.请参阅图10,一种应用于上述自动取送药的agv小车的控制系统,该系统包括agv小车和分别设置于agv小车上的传感模块、控制模块、行走驱动模块和托盘升降驱动模块,控制模块包括上位控制器2和下位控制器25,且上位控制器2与下位机控制器25之间通过can总线24连接,下位控制器25分别与行走驱动模块、托盘升降驱动模块连接。
62.上位控制器2用于接收操作人员手动输入的各种相关数据,且上位控制器2内设置有5g网络通讯模块,用于远程接收医院的处方管理系统发送的数据和控制指令。传感模块包括固定设置于agv小车顶部的激光雷达1、固定设置于agv小车底部的电磁引导模块29和设置于agv小车底部四周的薄膜压力传感器16,激光雷达1、电磁引导模块29和薄膜压力传感器16分别与下位控制器25连接。激光雷达1检测agv小车周边环境状况并传递给下位控制器25,下位控制器25将数据传递至上位控制器2,电磁引导模块29与地面上铺设的磁条导轨相匹配,引导agv小车的行进方向,薄膜压力传感器16感知agv小车行进过程中的受阻状况并传递给下位控制器25。
63.上位控制器2对接收到的数据和控制指令进行处理并决定相应的巡航策略发送至下位控制器25,下位控制器25根据巡航策略执行对应的程序,制行走驱动模块和托盘升降驱动模块的运行状态。控制模块还包括与下位控制器25连接的警报器5。
64.当激光雷达1检测agv小车周围环境并反馈给下位控制器25,下位控制器25将相应的信息传送至上位控制器2,上位控制器2处理分析后,做出相应的巡航策略,上位控制器2发出相应的指令至下位控制器25,下位控制器25则选择执行对应的程序,启动行走驱动模块工作,从而控制四个伺服电机12驱动对应的麦克纳姆轮14转动。
65.由于激光雷达1位置较高,无法排查距离agv小车较近或矮小的障碍物,当小车在运行过程中碰撞障碍物后,薄膜压力传感器16会将感应的信息传送至下位控制器25,进而通过下位控制器25选择执行对应的程序,控制四个伺服电机12暂停工作。当遇到突发情况时,例如:碰撞到障碍时,薄膜压力传感器16数值会发生明显变化,并将感应信号反馈给下位控制器25,下位控制器25选择执行相应的程序,使四个伺服电机12断电,同时通过警报器5提醒周围人群。若薄膜压力传感器16数值恢复,则小车恢复正常行走;若在指定时间内薄膜传感器16依旧处于突发数值状,则通过上位控制器2和内部网络远程反馈给有关部门。
66.当激光雷达1检测到在人流量较多时,激光雷达1起反馈运动信息的主要作用,在人流量较少,尤其上、下电梯位置点以及取药点等具体位置精确控制时,电磁引导29起主要作用。激光雷达1的检测反馈结果如果是行人多,则对应为地面的磁条导轨上障碍较多,则上位控制器2作出减速避让的巡航策略,下位控制器25则执行对应的程序控制伺服电机12减速;同时,激光雷达1继续将检测结果反馈至下位控制器25,从而控制各个伺服电机12的转速进行适当的调整,进而实现主动避障及避障后的继续行进。激光雷达1的检测反馈结果如果是人数较少,则对应为地面的磁条导轨上比较畅通,则上位控制器2作出行进的巡航策略,下位控制器25控制行走驱动模块执行相应的控制程序,并通过电磁引导模块29的反馈的位置信息,调整agv小车的行进状态,即控制伺服电机12的转速,此时激光雷达1则起辅助引导作用。若激光雷达1检测到其被遮挡,则发送相应信号给下位控制器25,并通过警报器5
进行提醒,下位控制器25将遮挡信息传送至上位控制器2,再由上位控制器2通过内部网络远程传递给医院的设备管理控制中心。当agv小车在电磁引导模块29引导下行进至上、下电梯的位置点时,电磁引导模块29将对应的信息反馈给下位传感器25,下位传感器25再将对应的信息传递给上位传感器2,上位控制器2与电梯的控制中心进行相互反馈,通过电梯的控制中心远程控制电梯的开启和对应目标楼层的设置,使agv小车能够顺利进入电梯、达到对应的楼层并顺利走出电梯。
67.优选的,该系统还包括与上位控制器通过无线网络连接的移动终端,例如手机,移动终端内置相应的小程序,用于查询和接收药品的取送状态信息,则待取药的病人或医护人员通过移动终端即可同步查询和了解对应的药品取送状态,便于药品的及时拿取。
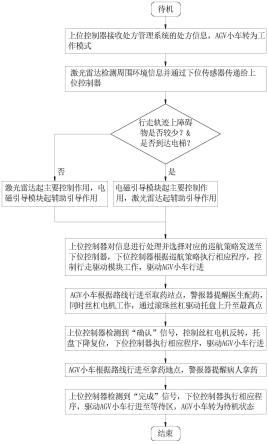
68.如图11所示,一种应用于上述自动取送药的agv小车控制系统的取送药方法,主要包括以下步骤:
69.s10、医生在医院的处方管理系统完成处方的开具,医院的处方管理系统通过无线网络将处方信息远程传送至上位控制器2,上位控制器2对接收到的信息进行处理,同时上位控制器2的触摸显示屏上显示对应的处方信息,agv小车由待机状态进入工作状态;
70.s20、激光雷达1检测agv小车周围环境状态,并将检测信息发送给下位控制器25,下位控制器25将数据传递至上位控制器2,上位控制器2对接收到的数据和控制指令进行处理并决定相应的巡航策略发送至下位控制器25,下位控制器25根据巡航策略执行对应的程序,控制agv小车的行走驱动模块提供agv小车的行走动力;若激光雷达检测agv周围环境的状态为行人多,则对应为地面的磁条导轨上障碍较多,下位控制器25控制行走驱动模块执行相应的控制程序,使agv小车减速避障;
71.s30、电磁引导模块29与地面铺设的磁条导轨进行配对循迹,引导agv小车的行进方向,配合行走驱动模块驱动agv小车到达取药地点;若激光雷达检测agv周围环境的状态为行人少,则对应为地面的磁条导轨上比较畅通,下位控制器25根据电磁引导模块29反馈的位置信息,控制行走驱动模块执行相应的控制程序,调整agv小车的行进状态;
72.当agv小车在电磁引导模块29引导下行进至上、下电梯的位置点时,电磁引导模块29将对应的信息反馈给下位传感器25,下位传感器25再将对应的信息传递给上位传感器2,上位控制器2与电梯的控制中心进行相互反馈,通过电梯的控制中心远程控制电梯的开启和对应目标楼层的设置,使agv小车能够顺利进入电梯、达到对应的楼层并顺利走出电梯。
73.s40、agv到达配药站点后,电磁引导模块29将位置信息反馈至下位控制器25,下位控制器25启动相应的控制程序,控制托盘升降驱动模块正向工作,使agv小车顶部的托盘30升起至最高点,通过警报器5提醒医生配药,取药地点的医生根据内部网络提供的来自处方管理系统的相关取药信息配备对应的药品,并将药品放在托盘30上,并在上位控制器2的触摸显示屏上点击“确定”按钮;
74.s50、上位控制器2接收到“确定”信息并处理后,将相应的控制指令发送至下位控制器25,下位控制器25根据控制指令执行对应的控制程序,控制托盘升降驱动模块反向工作,使agv小车顶部托盘30下降复位,完成取药过程;
75.s60、agv小车重复执行步骤s20和步骤s30,以同样的方式将药品送至指定的取药地点,完成送药过程;病人或医护人员根据上位控制器2的触摸显示屏上显示的药品信息或移动终端显示的agv小车编号,在对应的agv小车上拿取对应的药品,取药后在上位控制器2
的触摸显示屏上点击“完成”按钮;
76.s70、上位控制器2接收到“完成”信息并处理后,将相应的控制指令发送至下位控制器5,下位控制器25根据控制指令执行对应的控制程序,控制行走驱动模块驱动agv小车行进至指定的等待区域,agv小车由工作状态转为待机状态。agv小车在指定的等待区域可通过电磁引导模块29与地面上的磁条导轨的引导,停靠墙边并自动与充电装置对接,对电池进行自动充电。
77.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。