1.本发明涉及眼镜镜片的设计方法、制造方法、以及设计系统。
背景技术:
2.已公开有制造补偿屈光不正的眼睛像差的镜片的方法(专利文献1)。而且,在专利文献1中记载有修正至少一个目视方向的至少一个高阶的像差。
3.现有技术文献
4.专利文献
5.专利文献1:日本特许5096662号
技术实现要素:
6.发明所要解决的技术问题
7.即使通过作为现有技术的专利文献1所记载的技术补偿了佩戴者的眼睛的像差,佩戴者通常会进行绕光轴的眼球回旋,眼球回旋是作为对头部回旋的补偿的反射运动而产生的,因此该补偿未必总是能有效作用。
8.另外,例如在右耳和左耳的水平位置不同的情况下,眼镜镜片本体绕光轴旋转而歪斜。在产生这些的情况下,根据专利文献1记载的技术,不能够保证得到最好的视野。
9.图1a是示出根据眼波面决定眼镜镜片的波面,并且通过各个波面相互抵消抑制了基于各个波面的像差分布不均的理想状态的像差分布的概略图。
10.图1b是示出根据眼波面决定眼镜镜片的波面,但眼球绕光轴回旋,因此基于它们的波面的像差分布不均变得明显的状态的像差分布的概略图。
11.图1a、图1b的白色部分表示波面快进的部分(快进光),黑色部分表示波面慢进的部分(慢进光)。不快不慢的部分为灰色部分。这些在后述的图2、图6中一样。
12.如图1a所示,不考虑绕光轴的眼球回旋和眼镜镜片本体的旋转,能够得到最适合的视野。另一方面,实际上,绕光轴的眼球回旋是正常的。
13.在本说明书中,像差可以认为是来自眼睛或镜片的光的波面的紊乱。作为波的性质,通过组合像差为异号的波,像差被抵消。组合像差不为异号的波时,像差有时被抵消有时不被抵消。由绕光轴的眼球回旋引起像差不能抵消的状态如图1b所示。在图1b中,基于各个波面的各像差的分布不均变得明显。本发明是着眼于该点而做出的。
14.以下,将绕光轴的眼球回旋、眼镜镜片本体的旋转统称为“旋转”。在眼球(以及/或者头部回旋)的情况下单独使用“回旋”。
15.本发明的目的在于提供眼睛和眼镜镜片的像差结合时的像差量的变化相对于旋转稳定的技术。本说明书中的稳定是指即使进行上述旋转,眼睛和眼镜镜片的像差结合时的像差量比以往更难以变化。
16.用于解决技术问题的手段
17.本技术的发明人努力研究上述技术问题得到以下理论。
18.例如假定眼镜镜片具有旋转对称的像差分布。在该情况下,无论在眼球中是否存在非旋转对称的像差,即使眼球回旋,佩戴者的眼睛和眼镜镜片的像差结合时的像差量也没有变化。此情况在佩戴者的眼睛具有旋转对称的像差分布情况下也相同。
19.基于上述理论,本技术的发明人发现:在眼睛和眼镜镜片的任何一方(例如眼睛)具有旋转对称或者与旋转对称相近的像差分布的情况下,即使一方(例如眼镜镜片)具有偏离旋转对称的像差分布,虽要产生上述旋转,但眼睛和眼镜镜片的像差结合时的像差量的变化也会变少(即变得稳定)。以下,也将偏离旋转对称的像差分布称为“非旋转对称性”。在本说明书中,将偏离旋转对称程度大的情形称为“非旋转对称性强”,反之,即将接近旋转对称的情形称为“非旋转对称性弱”。
20.即本技术的发明人没有像现有技术一样地以抑制基于眼波面的像差的分布不均的方式来决定眼镜镜片的波面,而是发现了在接受并考虑眼波面的基础上,即使产生上述旋转,眼睛和眼镜镜片的像差结合时的像差量的变化也会变少的技术。
21.基于上述发现而创造出的本发明的各个方式如下。
22.本发明的第一方式,
23.一种眼镜镜片的设计方法,其中,
24.在佩戴者的眼睛的像差分布绕光轴的非旋转对称性强的情况下,取得以眼镜镜片的主子午线上各个点为中心的规定宽度范围内的区域中的像差分布的非旋转对称性弱的眼镜镜片作为设计解,
25.在佩戴者的眼睛的像差分布绕光轴的非旋转对称性弱的情况下,取得所述区域中的非旋转对称性强的眼镜镜片作为设计解。
26.本发明的第二方式为在第一方式所述的眼镜镜片的设计方法的基础上,
27.在使与眼睛的像差分布相关的非旋转对称性定量后的指标设为ei、ei的基准值设为es、使眼镜镜片的像差分布中的非旋转对称性定量后的指标设为li时,
28.在ei比es大的情况下,取得li低的眼镜镜片作为设计解,
29.在ei为es以下的情况下,取得li高的眼镜镜片作为设计解。
30.本发明的第三方式为在第二方式所述的眼镜镜片的设计方法基础上,
31.所谓的取得所述眼镜镜片作为设计解包含从li分别不同的多个设计解中选择一种。
32.本发明的第四方式为在第二或第三方式所述的眼镜镜片的设计方法的基础上,
33.ei至少是使佩戴者的眼角膜的瞳孔对应部分的绕光轴的像差分布的非旋转对称性定量化后的指标。
34.本发明的第五方式为在第四方式所述的眼镜镜片的设计方法的基础上,ei是由以下的式1表示的指标,
[0035][0036]
li是由以下的式2表示的指标,
[0037][0038]
e和l分别表示佩戴者的眼睛和眼镜镜片的zernike像差系数的极坐标,m为表示圆周方向次数的值,n为表示半径方向次数的值。
[0039]
本发明的第六方式为在第二或第三方式所述的眼镜镜片的设计方法的基础上,
[0040]
ei是基于佩戴者的眼球回旋程度、佩戴者的瞳孔径的变化程度、佩戴者的年龄、佩戴者使用眼镜的环境或者用途、以及、佩戴者从上次来访眼镜店后所经过的时间的至少一种而决定的指标。
[0041]
本发明的第七方式为在第二至第六任一项所述的眼镜镜片的设计方法的基础上,
[0042]
es基于统计或者学术上得到的与眼镜佩戴者的眼球相关的标准的或者平均的像差、佩戴者的眼球回旋程度、佩戴者的瞳孔径的变化程度、佩戴者的年龄、佩戴者使用眼镜的环境或者用途、以及佩戴者从上次来访眼镜店后所经过的时间的至少一种而决定。
[0043]
本发明的第八方式为在第二至第七任一项所述的眼镜镜片的设计方法的基础上,
[0044]
根据ei和es的差量的大小,取得眼镜镜片作为设计解。
[0045]
本发明的第九方式为在第一至第八任一项所述的眼镜镜片的设计方法的基础上,
[0046]
所述眼镜镜片为渐进屈光力镜片。
[0047]
本发明的第十方式为眼镜镜片的制造方法,其制造通过第一至第九方式中的任一项所述的眼镜镜片的设计方法设计的眼镜镜片。
[0048]
本发明的第十一方式为一种眼镜镜片的设计系统,其具备设计部,
[0049]
在所述设计部中,
[0050]
在佩戴者的眼睛的像差分布绕光轴的非旋转对称性强的情况下,取得以眼镜镜片的主子午线上各个点为中心的规定宽度范围内的区域中的像差分布的非旋转对称性弱的眼镜镜片作为设计解,
[0051]
在佩戴者的眼睛的像差分布绕光轴的非旋转对称性弱的情况下,取得所述区域中的非旋转对称性强的眼镜镜片作为设计解。
[0052]
本发明的第十二方式为第十一方式所述的眼镜镜片的设计系统的基础上,
[0053]
在使与眼睛的像差分布相关的非旋转对称性定量后的指标设为ei、ei的基准值设为es、使眼镜镜片的像差分布中的非旋转对称性定量后的指标为li时,
[0054]
在所述设计部中,
[0055]
在ei比es大的情况下,取得li低的眼镜镜片作为设计解,
[0056]
在ei为es以下的情况下,取得li高的眼镜镜片作为设计解。
[0057]
本发明的第十三方式为第十二方式所述的眼镜镜片的设计系统,其中,
[0058]
所谓的取得所述眼镜镜片作为设计解包含从li分别不同的多个设计解中选择一种。
[0059]
本发明的第十四方式为在第十二或十三方式所述的眼镜镜片的设计系统的基础上,
[0060]
ei至少是使佩戴者的眼角膜的瞳孔对应部分的绕光轴的像差分布的非旋转对称性定量化后的指标。
[0061]
本发明的第十五方式为第十四方式所述的眼镜镜片的设计系统的基础上,ei是由以下的式1表示的指标,
[0062][0063]
li是由以下的式2表示的指标,
[0064][0065]
e和l分别表示佩戴者的眼睛和眼镜镜片的zernike像差系数的极坐标,m是表示圆周方向次数的值,n是表示半径方向次数的值。
[0066]
本发明的第十六方式为在第十二或十三方式所述的眼镜镜片的设计系统的基础上,
[0067]
ei是基于佩戴者的眼球回旋程度、佩戴者的瞳孔径的变化程度、佩戴者的年龄、佩戴者使用眼镜的环境或者用途、以及、佩戴者从上次来访眼镜店后所经过的时间的至少一种而决定的指标。
[0068]
本发明的第十七方式为在第十二至第十六任一项所述的眼镜镜片的设计系统的基础上,
[0069]
es基于统计或者学术上得到的眼镜佩戴者的眼球相关的标准的或者平均的像差、佩戴者的眼球回旋程度、佩戴者的瞳孔径的变化程度、佩戴者的年龄、佩戴者使用眼镜的环境或者用途、以及佩戴者从上次来访眼镜店后所经过的时间的至少一种而决定。
[0070]
本发明的第十八方式为在第十二至十七任一项所述的眼镜镜片的设计系统的基础上,
[0071]
根据ei和es的差量的大小,取得眼镜镜片作为设计解。
[0072]
本发明的第十九方式为在第十一至十八任一项所述的眼镜镜片的设计系统的基础上,
[0073]
所述眼镜镜片为渐进屈光力镜片。
[0074]
对上述方式能够组合的本发明的其他实施如下。
[0075]
在求取ei时,n=1的像差量只是棱镜引起的,与析象无关,因此可以忽略。
[0076]
在求取ei时,|m|=2、n=2的像差量为散光量,即使在单焦点镜片对于矫正过的使用者来说也是已经习惯的像差,因此可以忽略。
[0077]
对未在远用部而在中间部和近用部附加透过非点像差的渐进屈光力镜片,也可以适用本发明的一个方式。作为判断应该附加多少程度的透过非点像差时的材料,可以采用本发明的一个方式。
[0078]
发明效果
[0079]
根据本发明,眼睛和眼镜镜片的像差结合时的像差量的变化相对于旋转稳定。
附图说明
[0080]
图1a是示出根据眼波面决定眼镜镜片的波面,并抑制基于这些波面像差的分布不均的理想状态的像差分布的概略图。图1b是示出根据眼波面决定眼镜镜片的波面,但眼球绕光轴回旋,因此基于它们的波面的像差的分布不均变得明显的状态的像差分布的概略图。
[0081]
图2是示出佩戴者a的眼睛的角膜的瞳孔对应部分的绕光轴的像差分布的图。
[0082]
图3a是示出镜片1的屈光力分布(m=0、n=2)的图。图3b是示出镜片1的非点像差分布(|m|=2、n=2)的图。图3c是示出镜片1的彗形像差分布(|m|=1、n=3)的图。图3d是示出镜片1的trefoil像差分布(|m|=3、n=3)的图。
[0083]
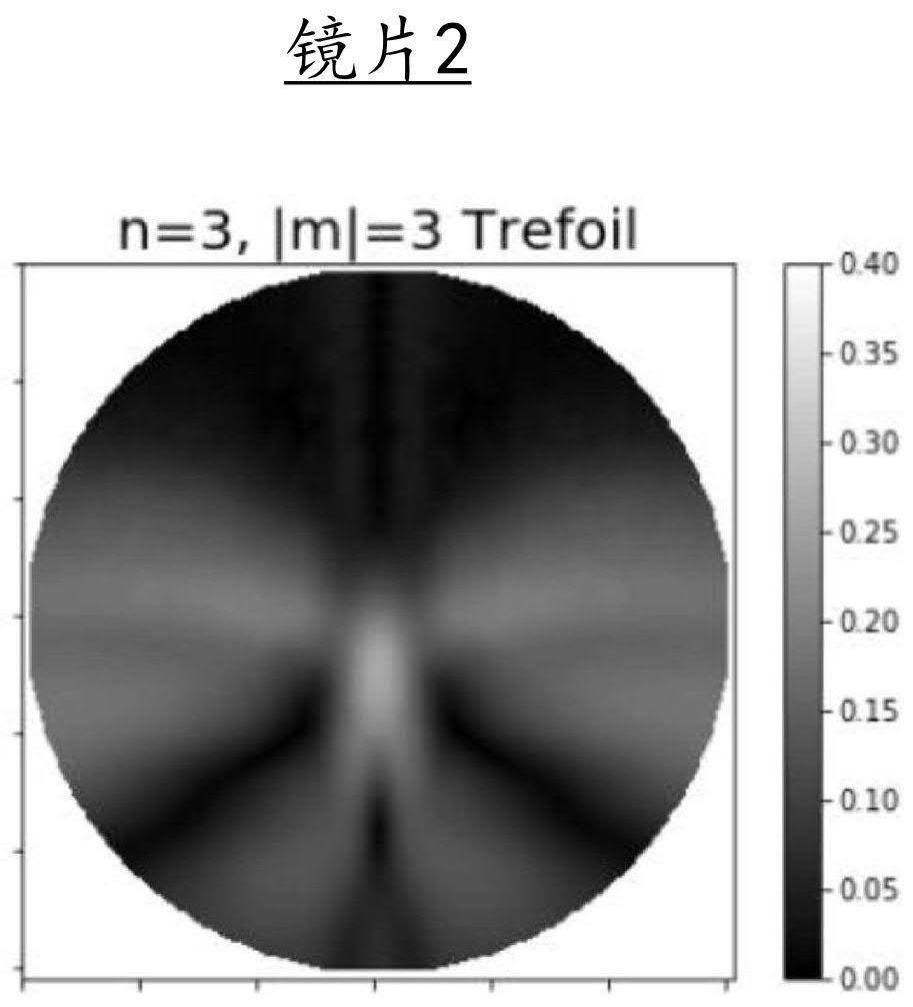
图4a是示出镜片2的屈光力分布(m=0、n=2)的图。图4b是示出镜片2的非点像差分布(|m|=2、n=2)的图。图4c是示出镜片2的彗形像差分布(|m|=1、n=3)的图。图4d是示出镜片2的trefoil像差分布(|m|=3、n=3)的图。
[0084]
图5a是示出镜片3的屈光力分布(m=0、n=2)的图。图5b是示出镜片3的非点像差分布(|m|=2、n=2)的图。图5c是示出镜片3的彗形像差分布(|m|=1、n=3)的图。图5d是示出镜片3的trefoil像差分布(|m|=3、n=3)的图。
[0085]
图6是示出佩戴者b的眼睛的角膜的瞳孔对应部分的绕光轴的像差分布的图。
[0086]
图7是示出本发明的一个实施方式的眼镜镜片的设计系统结构的框图。
[0087]
图8是本发明的一个实施方式的眼镜镜片的设计系统的流程图。
具体实施方式
[0088]
以下,对本发明的一个实施方式说明。在本说明书“~”指规定值以上且规定值以下。
[0089]
<眼镜镜片的设计方法>
[0090]
本发明的一个实施方式的眼镜镜片的设计方法如下。
[0091]“一种眼镜镜片的设计方法,其中,
[0092]
在佩戴者的眼睛的像差分布绕光轴的非旋转对称性强的情况下,取得以眼镜镜片的主子午线上各个点为中心的规定宽度范围内的区域中的像差分布的非旋转对称性弱的眼镜镜片作为设计解,
[0093]
在佩戴者的眼睛的像差分布绕光轴的非旋转对称性弱的情况下,取得所述区域中的非旋转对称性强的眼镜镜片作为设计解。”[0094]
本说明书中的“光轴”相当于各个光学面的中心处的法线。
[0095]
上段中记载的“中心”也称为“镜片中心”。所谓的“镜片中心”指眼镜镜片的几何中心、光学中心或者定心中心。在本说明书中,以定心中心为例示出。
[0096]
在本说明书中,以佩戴者在正面观察时通过镜片中心的情形为例示出。
[0097]
如在“用于解决技术问题的手段”中所述,根据上述结构,即使产生上述旋转,眼睛和眼镜镜片的像差结合时的像差量的变化变少(即变得稳定)。关于像差量变化的减少,像差的种类未特别限定,优选为高阶像差,所谓高阶像差为3次以上的像差。
[0098]
上述区域的“规定宽度”是比镜片半径小的水平宽度,优选(例如)可以为10mm左右,更优选为将瞳孔径在镜片面上投影的宽度。这可以为与直径2mm(最大直径5mm)的瞳孔
径对应的镜片面上的尺寸。
[0099]
上述“各个点”是主子午线上所有的(任意)点。
[0100]
以下,说明本发明的一个实施方式的眼镜镜片的设计方法的优选例以及变形例。
[0101]
优选地,使佩戴者的眼睛的像差分布的绕光轴的非旋转对称性、以及眼镜镜片的像差分布中的非旋转对称性量化。以下,例举含有量化过程的一例。
[0102]
e和l分别表示佩戴者的眼睛和眼镜镜片的zernike像差系数的极坐标,m是示出圆周方向的次数的值,n为示出半径方向的次数的值。另外,使佩戴者的眼睛的绕光轴的旋转角设为θ,眼镜镜片的绕光轴的旋转角设为γ。此时,眼睛和眼镜镜片的像差的平方和由以下的式3表示。
[0103][0104]
需要注意的是,采用平方和是因为根据zernike多项式的正交性其与全像差的平方和对应,并且与在视网膜上形成的光斑强度对应。本说明书的“光斑”是指在物体点的光通过眼镜镜片的一部分和眼球光学系统在视网膜上形成的光的分布中从峰值到第一暗环的范围。另外,在本说明书中,将所述范围中的能量的总和称为“光斑强度”。
[0105]
将上述式3在各个旋转角偏微分后为以下的式4。以下的式4示出通过旋转而产生的眼睛和眼镜镜片的像差的平方和的变动量。
[0106][0107]
本来,设计使上述式4的平方和的变动量最小化的眼镜镜片最好。另一方面,将上述公式根据佩戴者逐一计算在计算时间、资源上都没有优势。作为以前的问题,为了得到上述各个参数对佩戴者进行的测定时的视线方向(眼球方向)和佩戴眼镜镜片在生活时的视线的方向当然不同。那样的话,使上述式4的平方和的变动量最小化的意义减弱。
[0108]
因此,从上述式4,提取眼睛的相关参数、眼镜镜片的相关参数。并且将式4中的眼睛的相关参数设为佩戴者的眼睛的像差分布的绕光轴的非旋转对称性的指标ei。将式4中的眼镜镜片的相关参数设为眼镜镜片的像差分布中的非旋转对称性的指标li。
[0109]
ei是由以下的式1表示的指标,
[0110][0111]
li是由以下的式2表示的指标,
[0112]
[0113]
以下,例举关于作为顾客的被检者(将来的佩戴者)的具体例。
[0114]
佩戴者a的眼睛的非旋转对称性的指标ei为使佩戴者的眼睛的角膜的瞳孔对应部分的绕光轴的像差分布的非旋转对称性定量化后的指标。所谓的“角膜的瞳孔对应部分”是距离瞳孔中心至少直径2mm(最大直径5mm)的范围的角膜的部分。
[0115]
眼睛(角膜)的波面和像差可以通过在现有技术中记载的方法或者公知的方法取得。
[0116]
眼镜镜片的波面和像差可以通过在现有技术中记载的方法或者公知的方法取得。具体地,例如可以使用作为通过斐索型干涉方式的小型激光干涉计的富士胶片株式会社制的富士能(fujinon)f601,测定从眼镜镜片的物体侧的面向眼球侧的面透过的光的干涉条纹。得到干涉条纹的测定结果后,通过对干涉条纹的测定结果,适用公知的条纹解析算法,能够算出识别透过眼镜镜片的各个点的光的波面的数据。将各个点的波面特定的数据的集合体相当于透过眼镜镜片的光的波面数据。因此,对各个点绘制将各个点的波面特定的数据,则得到波面数据。
[0117]
图2是示出佩戴者a的眼睛的角膜的瞳孔对应部分的绕光轴的像差分布的图。但是,希望注意的是尺寸为纵4mm
×
横4mm。
[0118]
佩戴者a的眼睛的像差量如下(单位为d(屈光度)以下省略单位)。
[0119]
m=2、n=2:非点像差量0.65
[0120]
m=1、n=3:彗形像差量0.07
[0121]
m=3、n=3:trefoil像差量0.12
[0122]
m=2、n=4:高阶非点像差量0.06
[0123]
m=4、n=4:tetrafoil像差量0.10
[0124]
在之后的次数中像差量极小(<0.001),因此省略记载。以下,未记载的次数(在此n≧5)的像差量相同。
[0125]
在求取ei时,n=1的像差量仅因为棱镜而引起,与析象无关系,因此可以忽略。
[0126]
在求取ei时,m=2、n=2的像差量是散光矫正成分。佩戴者a如果不是初次佩戴眼镜镜片的话,在以前的眼镜镜片中应该已经具有散光矫正成分。即,能够预想佩戴者a已经习惯了散光矫正成分。因此,可以认为:即使在眼睛和眼镜镜片的像差结合时的散光矫正成分的像差量相对于上述旋转变化,佩戴者a也难以感觉变化。因此,在求取ei时,即使忽略m=2、n=2的像差量也可以。以下,例举该例。
[0127]
而且,佩戴者a的ei如下。
[0128]
ei=1
×
0.07 3
×
0.12 2
×
0.06 4
×
0.10
[0129]
=0.95
[0130]
值得注意的是,将ei的基准值设为es。在本例中,es采用申请人具有的顾客的各个ei的平均值。此为一例,es不限定于该平均值,例如可以采用使用互联网存储于大数据中的各个佩戴者的平均值,也可以采用最频值。
[0131]
基准值如下(省略单位)。
[0132]
m=2、n=2:非点像差量0.44
[0133]
m=1、n=3:彗形像差量0.18
[0134]
m=3、n=3:trefoil像差量0.13
[0135]
m=2、n=4:高阶非点像差量0.05
[0136]
m=4、n=4:tetrafoil像差量0.06
[0137]
es=1
×
0.18 3
×
0.13 2
×
0.05 4
×
0.06
[0138]
=0.89
[0139]
佩戴者a的ei比基准值es大。即,佩戴者a的角膜的瞳孔对应部分的像差分布比平均具有更强的非旋转对称性。根据本发明的眼镜镜片的设计方法,通过对佩戴者a取得li低的眼镜镜片作为设计解,来实现本发明的效果。若在ei为es以下的情况下,取得li高的眼镜镜片作为设计解。
[0140]
值得注意的是,在本发明的一个实施方式中,所谓的ei>es时的“li高”是指比ei≦es时的li的值高的值。即“li高”和“li低”可以为相互间相对的高低。另一方面,也可以与ei的基准值es相同地设置li的基准值ls,并对该ls评价高低。
[0141]
ls可以为申请人具有的顾客的各个li的平均值,例如可以采用使用互联网储存于大数据的各个佩戴者的平均值,也可以采用最频值。另外,因为是眼镜镜片的规定产品组中的一个眼镜镜片的设计解,也可以采用具有产品组的多个li中的中间值的设计解。
[0142]
值得注意的是,在本发明的一个实施方式中,分为ei>es和ei≦es的情形,也可以分为ei≧es和ei<es的情形。在该情况下,可以使比es的值稍低的值为新的es。结果,以es为阈值划分情形没有改变。
[0143]
在此所谓的“眼镜镜片的设计”可以在接受上述结果(ei>es)后设计眼镜镜片的像差分布(以及屈光力分布,以下省略。),也可以对已有的像差分布进行修正。另一方面,预先准备多个像差分布的基本设计(设计解),从li分别不同的多个基本设计选择一个也包含于“眼镜镜片的设计”中。这种方法能够减少计算量,并且削减设计所要的成本以及时间。
[0144]
所谓的“作为设计解取得”,例如在li为低眼镜镜片的情况下,可以包含上述像差分布的设计,也可以包含对已有的像差分布进行修正,还包含从li分别不同的多个基本设计中选择一个。另外,也可以将这些内容作为数据输出。在该情况下,例如也称为“将li为低眼镜镜片作为设计解并输出数据”。
[0145]
上述“眼镜镜片的选择”是从与现有技术的思想完全相反的想法所创出的构成。详细而言,与现有技术中把重点置于对于规定的眼睛的假定条件中的最高性能相对,本发明把重点置于在非假定条件中的最低性能。
[0146]
本说明书的“基本设计”是在渐进屈光力镜片中增加向内量前的像差分布。即以眼镜镜片的镜片中心为原点时的y轴相当于主子午线。此时,x轴是水平方向,z轴是光轴方向(前方)。之后例举li彼此不同的三个基本设计,在各个基本设计中列举的像差量是以眼镜镜片的主子午线上的各个点为中心的所定宽度范围内的区域中的像差量。但是,在各个基本设计中列举的像差量不包括眼睛的像差量。关于上述区域之前例举有宽度为10mm,但本发明不限定于此。
[0147]
另一方面,本发明不限于以增加向内量前的像差分布为基本设计的形态,可以预先准备多个设定增加向内量的主子午线后的设计解。
[0148]
另外,本发明的设计对象并不限于具备用于识别近距离的近用部、用于识别比近距离更远的距离的远用部、连接两部并且度数逐渐变化的中间部的渐进屈光力镜片。例如,仅设定用于识别近距离的近用部,除此之外也可以为度数逐渐变化的眼镜镜片(渐进屈光
力镜片),也可以为二焦点(双焦)镜片、单焦点镜片。
[0149]
在为单焦点镜片的情况下,主子午线是指通过旋转对称轴的垂直(纵)方向的直线(例如y轴)。
[0150]
在为渐进屈光力镜片(渐进多焦点镜片)的情况下,增加向内量的上述主子午线也称为主注视线。主注视线可以为直线也可以为曲线,只要通过拟合点fp、远用度数测定基准点f、近用度数测定基准点n就可以。这些位置能够通过设置于眼镜镜片的隐藏标记判别。
[0151]
采用从li彼此不同的多个基本设计中选择一个的示例,如下准备了三种基本设计。
[0152]
图3a是示出镜片1的屈光力分布(m=0、n=2)的图。
[0153]
图3b是示出镜片1的非点像差分布(|m|=2、n=2)的图。
[0154]
图3c是示出镜片1的彗形像差分布(|m|=1、n=3)的图。
[0155]
图3d是示出镜片1的trefoil像差分布(|m|=3、n=3)的图。
[0156]
但是,希望注意的是尺寸为纵50mm
×
横50mm。
[0157]
另外,在图3~图5中,白色部分是高像差部分,黑色部分是低像差部分。以下,像差分布图以同样的方式表示。
[0158]
镜片1的像差量如下(省略单位)。
[0159]
m=2、n=2:非点像差量0.03
[0160]
m=1、n=1:彗形像差量0.35
[0161]
m=3、n=3:trefoil像差量0.32
[0162]
li=2
×
0.03 1
×
0.35 3
×
0.32
[0163]
=1.37
[0164]
图4a是示出镜片2的屈光力分布(m=0、n=2)的图。
[0165]
图4b是示出镜片2的非点像差分布(|m|=2、n=2)的图。
[0166]
图4c是示出镜片2的彗形像差分布(|m|=1、n=3)的图。
[0167]
图4d是示出镜片2的trefoil像差分布(|m|=3、n=3)的图。
[0168]
但是,希望注意的是尺寸为纵50mm
×
横50mm。
[0169]
在镜片2中,在镜片1中的主子午线上的中间区域代替减少trefoil像差而增加非点像差。镜片2的像差量如下(省略单位)。
[0170]
m=2、n=2:非点像差量0.06
[0171]
m=1、n=1:彗形像差量0.38
[0172]
m=3、n=3:trefoil像差量0.25
[0173]
li=2
×
0.06 1
×
0.38 3
×
0.25
[0174]
=1.25
[0175]
图5a是示出镜片3的屈光力分布(m=0、n=2)的图。
[0176]
图5b是示出镜片3的非点像差分布(|m|=2、n=2)的图。
[0177]
图5c是示出镜片3的彗形像差分布(|m|=1、n=3)的图。
[0178]
图5d是示出镜片3的trefoil像差分布(|m|=3、n=3)的图。
[0179]
但是,希望注意的是尺寸为纵50mm
×
横50mm。
[0180]
在镜片3中,在镜片1中的主子午线上的中间区域trefoil像差和非点像差增加。相
应地,远离主子午线的非点像差变小。这意味着即使佩戴者的视线通过眼镜镜片的周边部,识别的像也很难摇晃或扭曲。镜片3的像差量如下(省略单位)。
[0181]
m=2、n=2:非点像差量0.06
[0182]
m=1、n=1:彗形像差量0.38
[0183]
m=3、n=3:trefoil像差量0.39
[0184]
li=2
×
0.06 1
×
0.38 3
×
0.39
[0185]
=1.67
[0186]
佩戴者a的ei比基准值es大。因此,对于佩戴者a,需要取得低li的眼镜片作为设计解。其结果是对佩戴者a选择镜片2。
[0187]
图6是示出佩戴者b的眼睛的角膜瞳孔对应部分的绕光轴的像差分布的图。但是,希望注意的是尺寸为纵4mm
×
横4mm。
[0188]
佩戴者b的眼睛的像差量如下(省略单位)。
[0189]
m=2、n=2:非点像差量0.75
[0190]
m=1、n=3:彗形像差量0.10
[0191]
m=3、n=3:trefoil像差量0.05
[0192]
m=2、n=4:高阶非点像差量0.03
[0193]
m=4、n=4:tetrafoil像差量0.05
[0194]
并且,佩戴者a的ei如下。
[0195]
ei=1
×
0.10 3
×
0.05 2
×
0.03 4
×
0.05
[0196]
=0.51
[0197]
佩戴者b的ei比基准值es更小。因此,对于佩戴者b,需要取得li高的眼镜镜片作为设计解。其结果是对佩戴者b选择镜片3。
[0198]
在本例中,准备了镜片1~3的基本设计,但也可以从已有的眼镜镜片中选择li比较低的。
[0199]
本发明的技术的范围不限定于上述实施方式,还包含在通过发明的构成要件或其组合而能够导出得到的特定效果的范围内,添加各种变更或改良的方式。
[0200]
在上述的例中对ei仅以像差量规定,但也可以增加其他的参数,也可以不增加而以其他的参数代替像差量来决定ei。作为该参数,例如有佩戴者的眼球回旋程度、佩戴者的瞳孔径的变化程度、佩戴者的年龄、佩戴者使用眼镜的环境或者用途、以及佩戴者从上次来访眼镜店后经过的时间中至少一种。
[0201]
如果佩戴者的眼球回旋程度以及/或者佩戴者的瞳孔径的变化程度小,眼睛和眼镜镜片结合时的像差量的变化小,因此可以根据眼球回旋程度降低ei的值。
[0202]
如果佩戴者的年龄高的话,眼波面的非旋转对称性变强的可能性高,因此可以根据佩戴者的年龄提高ei的值。
[0203]
如果佩戴者从上次来访眼镜店经过的时间(年月)长的话,眼波面的非旋转对称性变强的可能性高,因此可以根据该时间提高ei的值。
[0204]
此外,ei不仅可以以像差量规定,还可以通过佩戴者的年龄、以及佩戴者从上次来访眼镜店经过的时间的至少一个规定ei。因为为这两种参数时,能够推测佩戴者的眼睛像差分布的绕光轴的非旋转对称性的强弱。
[0205]
除ei之外或者代替ei,可以将es基于统计或者学术上得到的眼镜佩戴者的眼球相关的标准的或者平均的像差、佩戴者的眼球回旋程度、佩戴者的瞳孔径的变化程度、佩戴者的年龄、佩戴者使用眼镜的环境或者用途、以及佩戴者从上次来访眼镜店后经过的时间的至少一个规定。例如,在佩戴者的年龄高的情况下,ei变高的可能性高。在该情况下,通过代替修正ei的值,降低阀值即为界限值的es,使ei>es变得容易,结果可以容易地选择li值低的镜片。
[0206]
另外,作为眼镜镜片的一例例举有具备远用部、近用部以及中间部的渐进屈光力镜片。即使在该渐进屈光力镜片中,对未在远用部而在中间部和近用部附加透过非点像差的渐进屈光力镜片(wo2020/067522、wo2020/067523),也可以适用本发明的一个实施方式。作为判断应该附加多少程度的透过非点像差时的材料,可以采用本发明的一个实施方式。两个文献的记载全部能够并入本说明书。
[0207]
<眼镜镜片的制造方法>
[0208]
本发明也能够适用于眼镜镜片的制造方法。具体地,根据上述眼镜镜片的设计方法设计眼镜镜片,可以通过公知的方法具体地制造该眼镜镜片。值得注意的是,作为意指上述设计方法、本制造方法的至少任何一个的表达可以使用“眼镜镜片的供给方法”。以下的系统也同样地可以称为“眼镜镜片的供给系统”。
[0209]
<眼镜镜片的设计系统>
[0210]
本发明的一个实施方式的眼镜镜片的设计系统如下。值得注意的是,省略与在<眼镜镜片的设计方法>陈述的内容重复的内容。
[0211]“一种眼镜镜片的设计系统,其具备设计部,
[0212]
在所述设计部中,
[0213]
在佩戴者的眼睛的像差分布绕光轴的非旋转对称性强的情况下,取得以眼镜镜片的主子午线上各个点为中心的规定宽度范围内的区域中的像差分布的非旋转对称性弱的眼镜镜片作为设计解,
[0214]
在佩戴者的眼睛的像差分布绕光轴的非旋转对称性弱的情况下,取得所述区域中的非旋转对称性强的眼镜镜片作为设计解。”[0215]
本发明的一个实施方式的眼镜镜片的设计系统只要具备上述设计部就可以。上述设计部可以搭载于根据需要运行规定程序的计算机上。
[0216]
本发明的一个实施方式的眼镜镜片的设计系统优选为除了上述设计部具备以下结构:
[0217]
·
计算ei、li等的计算部
[0218]
·
保存具有不同的li的多个设计解(含有li值。除此之外基本设计、设计数据等)、佩戴者的ei、以及基准值es等的存储部
[0219]
·
用于得到ei的眼球测定器
[0220]
·
用于得到li的眼镜镜片测定器
[0221]
·
判定ei>es或ei≦es的判定部。
[0222]
图7是示出本发明的一个实施方式的眼镜镜片的设计系统的结构框图。
[0223]
计算部具备计算上述各式1~4的功能。计算机内的根据需要运行规定程序的部分可以承担计算部的功能。
[0224]
存储部可以存储多个镜片的设计解、除ei、es之外统计地或者学术地得到的眼镜佩戴者的眼球相关的标准的或者平均的像差、佩戴者的眼球回旋程度、佩戴者的瞳孔径的变化程度、佩戴者的年龄、佩戴者使用眼镜的环境或者用途、以及、佩戴者从上次来访眼镜店所经过的时间的至少任何一个。作为存储部可以为搭载于计算机的hdd等。
[0225]
眼球测定器只要能够收集用于得到ei的信息没有限制。另外,眼镜镜片测定器只要能够收集用于得到li则没有限制。例如可以使用作为通过斐索型干涉方式的小型激光干涉计的富士胶片株式会社制的富士能(fujinon)f601,得到波面数据、像差分布。
[0226]
在本系统内未必总是搭载有计算部、存储部、眼球测定器、以及/或者眼镜镜片测定器。例如可以将配置于本系统外的互联网上的上述各部和本系统连接。
[0227]
以下,说明使用本系统的各个工序。
[0228]
图8是本发明的一个实施方式的眼镜镜片的设计系统的流程图。
[0229]
首先,通过眼球测定器得到表示被检者(后面的佩戴者)中的zernike像差系数的极坐标上的各个m、n上的像差量(眼球测定工序)。基于该结果,通过计算部计算ei(ei计算工序)。该ei保存于存储部(ei保存工序)。
[0230]
值得注意的是,在本发明的一个实施方式中,预先求取预先准备的镜片的设计解1~n(n为2以上的整数)的各个li1~n(li准备工序)。li1~n保存于存储部。
[0231]
可以预先准备多个镜片的设计解代替li准备工序,通过眼镜镜片测定器得到表示在该眼镜镜片中的zernike像差系数的极坐标上的各个m、n上的像差量(眼镜镜片测定工序)。值得注意的是,为了说明方便,对实际的眼镜镜片制造前的镜片的设计解使用“眼镜镜片测定工序”这样的表达。当然,可以预先准备作为实物的眼镜镜片,通过眼镜镜片测定器得到表示该眼镜镜片中的zernike像差系数的极坐标上的各个m、n上的像差量。基于以上的眼镜镜片测定工序的结果,通过计算部计算li(li计算工序)。该li保存于存储部(li保存工序)。
[0232]
根据存储于存储部的各个佩戴者的数据通过计算部计算基准值es(es计算工序)。该es保存于存储部(es保存工序)。
[0233]
然后,在判定部判定ei>es或ei≦es。在ei>es的情况下,通过设计部,在各个li1~n中选择低值的镜片的设计解(设计工序)。此时,可以根据ei和es差量的大小,从作为多个镜片的设计解的各个li1~n中选择一个设计解。例如在ei>es并且ei和es差量极其大的情况下,可以从各个li1~n中选择最低值的设计解。
[0234]
另外,作为本发明的一个实施方式的变形例可以利用所叙述的方法通过计算部计算基准值ls(ls计算工序)。该ls可以保存于存储部(ls保存工序)。而且,在设计工序中,可以评价对基准值ls的li的高低,并选择规定值的li。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。