1.本发明涉及一种自主移动系统、自主移动方法以及存储介质。
背景技术:
2.在预定的建筑物或设施内自主移动的自主移动装置的开发正在进行中。这种具有装载平台的自主移动装置可以作为自动递送包裹的自动递送装置。例如,自动递送装置可以通过自主地从出发点移动到目的地而将在出发点处装载的包裹递送到目的地。
3.例如,日本专利第5332561号(jp 5332561 b)描述了当多个机器人即将在诸如交叉路口的汇合处汇合时,使具有较低优先级的机器人待命而使具有较高优先级的机器人先行。
技术实现要素:
4.例如,在jp 5332561 b的机器人中,当在后的机器人比在前的机器人具有更高的优先级时,可能难以创建高效的递送安排。例如,在jp 5332561 b的图8(a)中,当递送顺位按照f、a和b的顺序增高时,没有可以暂时疏散a的地方,使得难以创建高效的递送安排。
5.本发明是为了解决上述问题而做出的,并且提供了一种能够提高移动效率的自主移动系统、自主移动方法和存储介质。
6.根据本实施例的自主移动系统是一种在设施中自主移动的自主移动系统。在对于在所述设施中在目的地处递送或通过路径点分配给多个自主移动系统的优先级中,当自主移动系统具有较低的优先级时,自主移动系统在预定的待命区域待命,直到具有较高优先级的另一个自主移动系统完成递送或通过。通过这样的配置,即使当在后的自主移动系统具有更高的优先级时,在前的自主移动系统能够在待命区域暂时待命,从而可以形成高效的递送安排。因此,可以提高移动效率。
7.在上述自主移动系统中,待命区域可以具有根据到目的地或路径点的距离进行优先级排序的多个待命位置,并且可以从具有较高优先级的待命位置开始被用于待命。通过这样的配置,待命状态的自主移动系统可以在被轮到时缩短从待命区域移动到目的地或路径点的时间,并且可以创建高效的递送安排。
8.在上述自主移动系统中,当自主移动系统具有比正在待命区域中待命的另一自主移动系统更高的优先级时,自主移动系统可以在朝向待命区域移动时预订(reserve)具有比另一自主移动系统待命的待命位置更高的优先级的待命位置。通过这样的配置,可以在到达该待命区域后立即在该待命位置待命,从而可以缩短待命时间。
9.在上述自主移动系统中,当自主移动系统具有比正在待命区域中待命的另一自主移动系统更高的优先级时,自主移动系统可以在到达待命区域时切入具有比另一自主移动系统待命的待命位置更高的优先级的待命位置。通过这样的配置,可以根据优先级在待命位置待命,从而可以提高移动效率。
10.在上述自主移动系统中,当在具有最高优先级的待命位置待命时,自主移动系统
可以向该自主移动系统的管理员通知待命信息,该待命信息包含在除具有最高优先级的待命位置以外的待命位置处待命的自主移动系统的待命信息。通过这样的配置,管理员可以掌握待命状态。
11.在上述自主移动系统中,自主移动系统可以包含与清洁标志或不清洁标志相关联的自主移动系统,在设施中可以设置多个待命区域,多个待命区域可以包含与清洁标志或不清洁标志相关联的待命区域,并且当与清洁标志相关联时,自主移动系统可以在与清洁标志相关联的待命区域中的待命位置待命,而当与不清洁标志相关联时,自主移动系统可以在与不清洁标志相关联的待命区域中的待命位置待命。通过这样的配置,可以提高自主移动系统和待命区域的清洁度。
12.在上述自主移动系统中,在与清洁标志相关联的待命区域和与不清洁标志相关联的待命区域之间,可以设置与不同于清洁标志和不清洁标志的标志相关联的待命区域。通过这样的配置,可以进一步提高待命区域的清洁度。
13.根据实施例的自主移动系统包含:多个自主移动装置,其在设施中自主移动;以及服务器装置,其向自主移动装置发送行进信息,并从自主移动装置接收行进信息。服务器装置对于在设施中在目的地处递送或通过路径点为各个自主移动装置进行优先级排序。具有较低优先级的自主移动装置在预定的待命区域待命,直到具有较高优先级的另一自主移动装置完成递送或通过。通过这样的配置,即使在在后的自主移动系统具有更高的优先级时,在前的自主移动系统也能够在待命区域暂时待命,从而可以建立高效的递送安排。因此,可以提高移动效率。
14.在上述自主移动系统中,待命区域可以具有根据到目的地或路径点的距离进行优先级排序的多个待命位置,并且可以从具有较高优先级的待命位置开始被用于待命。通过这样的配置,待命状态的自主移动系统在被轮到时可以缩短从待命区域移动到目的地或路径点的时间,并且可以创建高效的递送安排。
15.在上述自主移动系统中,当具有比正在待命区域中待命的另一自主移动装置更高的优先级的自主移动装置向待命区域移动时,服务器装置可以预订具有比另一自主移动装置待命的待命位置更高的优先级的待命位置。通过这样的配置,可以在到达待命区域后立即在待命位置待命,从而可以缩短待命时间。
16.在上述自主移动系统中,具有比正在待命区域中待命的另一自主移动装置更高的优先级的自主移动装置可以在到达待命区域时,切入具有比另一自主移动系统待命的待命位置更高的优先级的待命位置。通过这样的配置,可以根据优先级在待命位置处待命,从而可以提高移动效率。
17.在上述自主移动系统中,服务器装置可以共同地向自主移动系统的管理员通知正在待命区域中待命的多个自主移动装置的待命信息。通过这样的配置,管理员可以掌握待命状态。
18.在上述自主移动系统中,服务器装置可以将自主移动装置与清洁标志或不清洁标志相关联,并且可以将待命区域与清洁标志或不清洁标志相关联。与清洁标志相关联的自主移动装置可以在与清洁标志相关联的待命区域中的待命位置处待命。与不清洁标志相关的自主移动装置可以在与不清洁标志相关的待命区域中的待命位置处待命。通过这样的配置,可以提高自主移动系统和待命区域的清洁度。
19.在上述自主移动系统中,在与清洁标志相关联的待命区域和与不清洁标志相关联的待命区域之间,可以设置与不同于清洁标志和不清洁标志的标志相关联的待命区域。通过这样的配置,可以进一步提高待命区域的清洁度。
20.根据本实施例的自主移动方法是用于在设施中自主移动的自主移动装置的自主移动方法。该自主移动方法包含:在对于在设施中在目的地处递送或通过路径点分配给多个自主移动装置的优先级中,为自主移动装置分配其中一个优先级的步骤;以及当自主移动装置具有较低优先级时,使自主移动装置在预定的待命区域待命,直到具有较高优先级的另一自主移动装置完成递送或通过的步骤。通过这样的配置,即使在在后的自主移动装置具有较高的优先级时,在前的自主移动装置也可以在待命区域暂时待命,从而可以创建高效的递送安排。因此,可以提高移动效率。
21.根据本实施例的存储介质存储用于在设施中自主移动的自主移动装置的自主移动程序。该自主移动程序使计算机执行:在对于在设施中在目的地处递送或通过路径点而分配给多个自主移动装置的优先级中,为自主移动装置分配其中一个优先级;以及当自主移动装置具有较低优先级时,使自主移动装置在预定的待命区域待命,直到具有较高优先级的另一自主移动装置完成递送或通过。通过这样的配置,即使在在后的自主移动装置具有更高的优先级时,在前自主移动装置也要在待命区域暂时处于待命状态,从而可以创建高效的递送安排。因此,可以提高移动效率。
22.本实施例可以提供一种能够提高移动效率的自主移动系统、自主移动方法和存储介质。
附图说明
23.下面将参照所附附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,其中相同的附图标记指代相同的元件,并且其中:
24.图1是图示出根据第一实施例的移动机器人的示意图;
25.图2是图示出根据第一实施例的移动机器人的立体图;
26.图3是图示出根据第一实施例的移动机器人的框图;
27.图4是图示出根据第一实施例的移动机器人在设施中的移动方法的平面图;
28.图5是图示出根据第一实施例的移动机器人在设施中的移动方法的平面图,并且其示出了具有较高优先级的移动机器人切入具有比具有较低优先级的移动机器人的待命位置更高的优先级的待命位置的示例;
29.图6是图示出根据第一实施例的移动机器人在设施中的移动方法的平面图,并且其示出了移动机器人在向待命区域移动时预订待命位置的示例;
30.图7是图示出根据第一实施例的移动机器人在设施中的移动方法的平面图,并且其示出了移动机器人和待命区域具有标志信息的示例;
31.图8是图示出根据第一实施例的移动机器人在设施中的自主移动方法的流程图;
32.图9是图示出根据第二实施例的服务器装置的框图;以及
33.图10是图示出根据第二实施例的自主移动系统的运行的时序图。
具体实施方式
34.下文将通过本发明的实施例来描述本发明,但权利要求书中的发明并不限于以下实施例。此外,并非实施例中所描述的所有配置都是解决问题必不可少的手段。为了清楚起见,下面的描述和附图已被适当地省略和简化。在各个附图中,相同的元件用相同的附图标记表示,并且必要时省略重复的描述。
35.第一实施例
36.将描述根据第一实施例的自主移动系统。在本实施例中,自主移动系统可以被替换成自主移动装置,或者自主移动装置可以被替换成自主移动系统。此外,根据本实施例的自主移动系统可以包含自主移动装置。自主移动装置在预定的设施中自主地移动。例如,自主移动装置可以是自主移动的移动机器人或自主移动以运输被运输物体的运输机器人。在下文中,移动机器人将被描述为自主移动装置的示例。移动机器人将在“移动机器人的结构”和“移动机器人的运行”中分别描述。
37.移动机器人的结构
38.图1是图示出根据第一实施例的移动机器人的示意图。如图1所示,移动机器人100是在预定设施900中自主移动的自主移动装置的示例。预定设施900例如是医院。该预定设施900不限于医院,并且可以是酒店、购物中心等,只要移动机器人100能够在该预定设施900中自主移动即可。
39.移动机器人100在设施900中的地板表面910上自主移动。设施相机400被固定在设施900中。例如,设施相机400被固定到设施900的天花板920,并且拍摄设施相机400周围区域的图像以生成图像数据。可以在设施900中设置多个设施相机400。
40.移动机器人100和设施相机400相互连接,以便能够经由诸如无线通信的信息传输手段相互通信。移动机器人100和设施相机400可以彼此连接以便能够彼此直接通信,或者可以彼此连接以便能够经由接入点500和服务器装置300彼此通信。因此,移动机器人100可以直接从设施相机400获取图像数据,或者可以经由接入点500和服务器装置300获取图像数据。
41.接入点500例如是无线局域网(lan)接入点。接入点500被固定在设施900中并且从位于接入点500周围的移动机器人100获取位置信息和行进信息。可以在设施900中提供多个接入点500。
42.多个移动机器人100可以在设施900中自主地移动。当移动机器人100自主移动时,移动机器人100可以彼此连接,以便能够经由诸如无线通信的信息传输手段彼此通信。移动机器人100可以彼此连接以便能够彼此直接通信,或者可以彼此连接以便能够经由接入点500和服务器装置300彼此通信。
43.移动机器人100将被运输物体运输到设施900中的目的地。替代地,例如,移动机器人100经由通过路径点移动以便移动到目的地。对于诸如在设施900中在目的地处递送被运输物体的工作或通过路径点,可以为多个移动机器人100进行优先级排序。当移动机器人100具有较低的优先级时,移动机器人100在预定的待命区域待命,直到具有较高优先级的另一移动机器人100完成在目的地的工作或通过路径点。
44.移动机器人100可以根据要被运输的运输物体的清洁度与清洁标志、不清洁标志和通用标志相关联。预定的待命区域也可以根据清洁度与清洁标志、不清洁标志和通用标
志相关联。
45.在移动机器人100和服务器装置300以及其他移动机器人100之间传输和接收的信息可以包含分配给在目的地处的工作或通过路径点的优先级信息,以及与移动机器人100和待命区域相关联的标志信息。
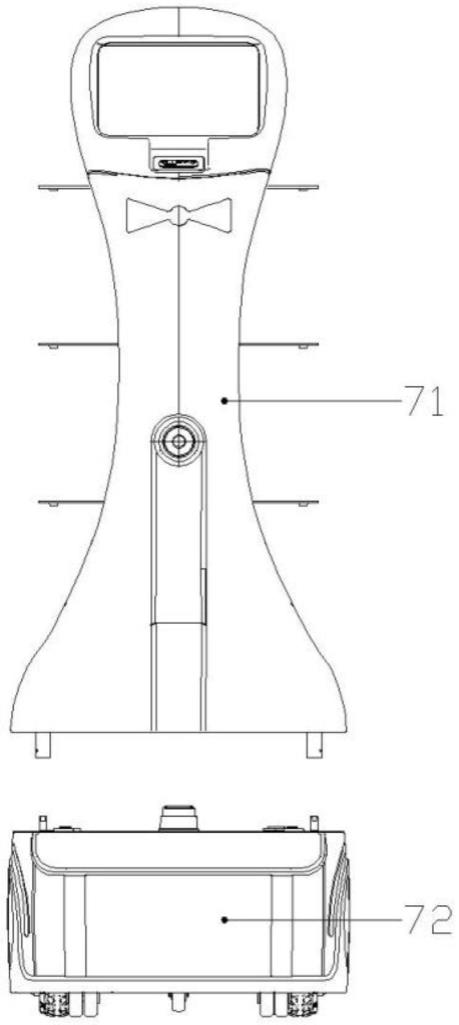
46.图2是图示出根据第一实施例的移动机器人100的立体图。图3是图示出根据第一实施例的移动机器人100的框图。如图2和图3所示,移动机器人100包含驱动单元110、壳体单元120、通信单元130、操作接收单元140、显示单元150、传感器组160、标识(id)传感器170、控制单元180和存储单元190。
47.如图2所示,移动机器人100是在作为移动表面的地板表面910上移动的移动体。这里,为了便于说明移动机器人100,使用了xyz正交坐标轴系统。地板表面910为xy平面,上侧为 z轴方向。
48.驱动单元110用作用于移动该移动机器人100的装置。驱动单元110可以包含两个驱动轮111以及脚轮112,两个驱动轮111与地板表面910接触并且可围绕一个旋转轴彼此独立地旋转,该旋转轴沿着与直线方向(图中的前后方向或x轴方向)垂直的方向(图中的左右方向或y轴方向)延伸,脚轮112与地板表面910接触。移动机器人100以这样的方式向前或向后移动,使得布置在左侧和右侧上的驱动轮111以相同的旋转速度被驱动,并通过在左右驱动轮111之间产生旋转速度或旋转方向的差异来转弯。驱动单元110根据来自控制单元180的命令驱动驱动轮111。
49.壳体单元120被布置在移动机器人100的驱动单元110上方。壳体单元120可具有收纳室门121。当收纳室门121打开时,用于收纳预定的被运输物体的收纳室被设置在壳体单元120的内部。即,移动机器人100也可以用作运输预定被运输物体的运输机器人。壳体单元120可以根据来自控制单元180的命令打开和关闭收纳室门121。
50.如图3所示,通信单元130是可通信地连接到外部的接口。通信单元130包含例如天线和对通过天线发送的信号进行调制或解调的电路。通信单元130直接从设施相机400或经由接入点500和服务器装置300接收图像数据。
51.此外,通信单元130可以从服务器装置300接收关于目的地的信息、关于是否允许移动的信息、优先级信息以及标志信息。此外,通信单元130可以向服务器装置300发送与移动机器人100的状态有关的信息、位置信息、行进信息、优先级信息、标志信息等。此外,通信单元130可以直接地或经由接入点500和服务器装置300,向另一移动机器人100发送位置信息、图像数据、优先级信息和标志信息以及从该另一移动机器人接收位置信息、图像数据、优先级信息和标志信息。
52.通信单元130可以周期性地向服务器装置300发送心跳信号。心跳信号可以包含按时间顺序指示移动机器人100的状态的日志数据。此外,心跳信号可以包含移动机器人100的id(标识)和用户的id。
53.通信单元130连接到控制单元180,向控制单元180输出从设施相机400和服务器装置300发送的信号,并且向服务器装置300发送从控制单元180输出的信号。
54.操作接收单元140接收来自用户的输入操作并向控制单元180发送操作信号。作为用于接收来自用户的输入操作的装置,操作接收单元140可以包含例如操作按钮、叠加在显示单元150上的触摸面板等。用户操作上述输入操作装置来打开和关闭电源、打开和关闭收
纳室门121等。此外,用户可以操作操作接收单元140以根据收纳在收纳室中的被运输物体的清洁度输入与移动机器人100相关联的标志信息。例如,用户从操作接收单元140输入清洁标志、不清洁标志、通用标志等。
55.显示单元150设置为例如从壳体单元120的上表面突出。显示单元150例如是包含矩形液晶面板的显示单元。显示单元150根据来自控制单元180的命令适当地显示信息。接收来自用户的操作的触摸面板可以叠加在显示单元150上。显示单元150可以显示与移动机器人100相关联的标志信息。
56.传感器组160包含获取移动机器人100自主移动所需的数据的传感器。传感器组160包含例如机器人相机161和距离传感器162。传感器组160可以包含除了机器人相机161和距离传感器162之外的传感器。
57.例如,机器人相机161被布置在壳体单元120的上部,显示单元150的下方。在机器人相机161中,具有相同视角的两个相机单元可以彼此在水平方向上分开布置。通过这种配置,由各个相机单元拍摄的图像作为图像数据被输出到控制单元180。
58.距离传感器162被布置在例如壳体单元120的下部中。距离传感器162可以被布置在壳体单元120的 x轴方向侧的表面、-x轴方向侧的表面、 y轴方向侧的表面和-y轴方向侧的表面中的各个的下部中。距离传感器162测量移动机器人100周围物体和移动机器人100之间的距离。控制单元180通过分析由机器人相机161输出的图像数据和由距离传感器162输出的检测信号来识别移动机器人100周围的障碍物,并测量移动机器人100和障碍物之间的距离。
59.id传感器170设置在例如显示单元150的附近。id传感器170识别操作移动机器人100的用户的id,并检测在各个用户所拥有的id卡中包含的唯一标识符。id传感器170包含例如用于读取关于无线标签的信息的天线。用户将id卡靠近id传感器170,使得移动机器人100识别作为操作者的用户的id。
60.控制单元180是包含诸如中央处理单元(cpu)的运算装置的信息处理装置。控制单元180包含设置在控制单元180中的硬件和存储在硬件中的程序。即,由控制单元180执行的处理由硬件或软件实现。
61.控制单元180从各个配置获取各种类型的信息并且根据获取的信息向各个配置发出命令。例如,控制单元180根据从机器人相机161获取的图像数据和从距离传感器162获取的关于移动机器人100周围物体的信息,来检测移动机器人100和周围物体之间的距离。然后,控制单元180命令驱动单元110沿着计算出的路线移动。当执行这样的处理时,控制单元180参照存储在存储单元190中的与楼层地图有关的信息。
62.存储单元190包含诸如闪存和固态驱动器(ssd)的非易失性存储器。存储单元190存储移动机器人100用于自主移动的设施的楼层地图。此外,存储单元190存储移动机器人100的优先级信息。存储单元190还存储与移动机器人100和待命区域相关联的标志信息。存储单元190连接到控制单元180,并响应于来自控制单元180的请求而向控制单元180输出存储的信息。
63.如图2所示,移动机器人100将其上安装有机器人相机161的 x轴方向侧作为前方(front)。也就是说,在通常移动期间,行进方向为如箭头所示的 x轴方向。
64.对于如何定义移动机器人100的前方,可以采用各种想法。例如,可以基于如何布
置用于识别周围环境的传感器组160来定义前方。具体地,可以将其上布置有具有高识别能力的传感器或布置有许多传感器的壳体单元120的 x轴方向侧设定为前方。通过如上所述定义前方,移动机器人100可以在更准确地识别周围环境的同时移动。根据本实施例的移动机器人100也将其上布置有机器人相机161的 x轴方向侧作为前方。
65.替代地,可以基于如何布置显示单元150来定义前方。当显示单元150显示人物的面部等时,周围的人自然地认识到显示单元150是移动机器人100的前方。因此,当显示单元150的显示表面侧被设定为前方时,对周围的人几乎没有什么不适。根据本实施例的移动机器人100还将显示单元150的显示表面侧作为前方。
66.此外,可以基于移动机器人100的壳体的形状来定义前方。例如,当壳体单元120在行进表面上的投影形状为矩形时,将短侧作为前方比将纵向侧作为前方要更好,从而在移动过程中不会阻碍经过移动机器人100的人。即,取决于壳体的形状,在移动机器人100正常移动时,存在优选设定为前方的壳体表面。根据本实施例的移动机器人100也将矩形形状的短侧作为前方。如上所述,对于移动机器人100,前方被定义以便匹配一些想法。然而,可以考虑移动机器人的形状和作用,来确定定义前方的想法。
67.移动机器人的运行
68.接下来,将描述根据本实施例的移动机器人的运行。例如,用户开启移动机器人100的电源。然后,用户将期望的任务输入到操作接收单元140。必要时,当电源被开启时或当用户操作操作接收单元140时,id传感器170识别用户的id。
69.为了运输被运输物体作为期望的任务,用户操作操作接收部140以打开收纳室门121并将被运输物体收纳在收纳室中。然后,用户操作操作接收单元140以关闭收纳室门121。当收纳在收纳室中的被运输物体是清洁的被运输物体时,用户将移动机器人100与清洁标志相关联。替代地,用户将清洁的被运输物体收纳在与清洁标志相关联的移动机器人100中。例如,用户操作操作接收单元140以将移动机器人100与清洁标志相关联。
70.这里,清洁的被运输物体例如是人体摄入的药物、输血用的血液、食物等,与人体接触的未使用的注射器、未使用的注射针、衣物等。另一方面,不清洁的被运输物体是被丢弃的垃圾等。此外,通用的被运输物体是文具、复印纸等。
71.当收纳在收纳室中的被运输物体是不清洁的被运输物体时,用户将移动机器人100与不清洁标志相关联。替代地,用户将不清洁的被运输物体收纳在与不清洁标志相关联的移动机器人100中。例如,用户操作操作接收单元140以将移动机器人100与不清洁标志相关联。
72.此外,当收纳在收纳室中的被运输物体是通用的被运输物体时,用户将移动机器人100与通用标志相关联。替代地,用户将通用的被运输物体收纳在与通用标志相关联的移动机器人100中。例如,用户操作操作接收单元140以将移动机器人100与通用标志相关联。
73.清洁标志、不清洁标志和通用标志的关联不限于用户对操作接收单元140的操作。移动机器人100可以使用传感器组160判定被运输物体是清洁的、不清洁的还是通用的,并将被运输物体与相应的标志相关联。此外,移动机器人100可以基于从服务器装置300发送的标志信息与标志相关联。
74.此外,移动机器人100并不总是与清洁标志、不清洁标志和通用标志中的任意一个相关联。可以存在不与标志相关联的移动机器人100。
75.接下来,用户使用操作接收单元140输入被运输物体要被递送到的目的地。移动机器人100的控制单元180可以使用存储在存储单元190中的楼层地图来搜索到目的地的路线。移动机器人100沿着搜索到的路线自主地移动。
76.图4是图示出根据第一实施例的移动机器人100在设施900中的移动方法的平面图。如图4所示,设施900设置有沿着x轴方向延伸的通道902。目的地908被设置在通道902中的预定位置。移动机器人100在目的地908处进行工作。例如,在目的地908处的工作是被运输物体的递送。路径点909可以被设置在通道902的预定位置处,而不是在目的地908处。移动机器人100通过通过路径点909而移动。目的地908和路径点909并不限于设置在通道902中,而是只要使用了该设施900,就可以设置在房间、大厅等当中。此外,在下文的描述中,以使用目的地908为例,将对被运输物体的递送作为在目的地908处的工作进行描述。
77.在目的地908的附近设置待命区域930。待命区域930优选地设置在通道902中,以便不干涉人和其他移动机器人100的移动。待命区域930有多个待命位置931至933。在图中,示出了三个待命位置931至933,但多个待命位置931至933的数量不限于三个,可以是两个或四个或更多。待命位置931至933是移动机器人100停止和待命的地方。
78.多个移动机器人100a至100c将被运输物体递送到目的地908。在图中,示出了三个移动机器人100a至100c,但是多个移动机器人100a至100c的数量不限于三个,可以是两个或四个或更多。
79.对于在设施900中的目的地908处的递送,为多个移动机器人100a至100c进行优先级排序。例如,移动机器人100a具有第一优先级,移动机器人100b具有第二优先级,而移动机器人100c具有第三优先级。因此,移动机器人100a在移动机器人100b和移动机器人100c之前在目的地908处递送被运输物体。移动机器人100b在移动机器人100a之后、移动机器人100c之前,在目的地908处递送被运输物体。
80.如上所述,在分配给多个移动机器人100a至100c以用于在设施900中的目的地908处的工作的优先级中,具有较低优先级的移动机器人100b和移动机器人100c在预定的待命区域930中待命,直到具有较高优先级的机器人100a完成工作。例如,当具有第一优先级的移动机器人100a正在递送被运输物体时,具有较低优先级的移动机器人100b和移动机器人100c在待命区域930中待命,直到移动机器人100a完成递送。
81.此外,当具有较低优先级的移动机器人100b和移动机器人100c在具有较高优先级的移动机器人100a之前到达目的地908时,移动机器人100b和移动机器人100c可以在待命区域930中待命,直到具有较高优先级的移动机器人100a到达目的地908并完成对被运输物体的递送。
82.待命区域930可以具有根据到目的地908的距离而被按照优先级排序的多个待命位置931至933。例如,待命位置931比待命位置932和待命位置933更靠近目的地908。待命位置932比待命位置933更靠近目的地908。因此,待命位置931具有第一优先级,待命位置932具有第二优先级,而待命位置933具有第三优先级。
83.在正在待命区域930中待命的多个移动机器人100b和100c中,具有较高优先级的移动机器人100b在具有较高优先级的待命位置931处待命。具有比移动机器人100b低的优先级的移动机器人100c在待命位置932处待命,该待命位置932具有低于移动机器人100b待命的待命位置931的优先级。因此,待命位置931至待命位置933从具有较高优先级的待命位
置931开始被使用。
84.图5是图示出根据第一实施例的在设施900中移动移动机器人100的移动方法的平面图,并且其示出了具有较高优先级的移动机器人100d切入比具有较低优先级的移动机器人100c的待命位置具有更高的优先级的待命位置的示例。如图5所示,移动机器人100d到达待命区域930。移动机器人100d的优先级低于移动机器人100b的优先级,且高于移动机器人100c的优先级。在这种情况下,移动机器人100c离开待命位置932并移动到待命位置933。移动机器人100d在空置的待命位置932处待命。
85.通过这种方式,当移动机器人100d到达待命区域930时,具有比正在待命位置932处待命的移动机器人100c更高的优先级的移动机器人100d使得移动机器人100c移动到具有较低优先级的待命位置933。然后,移动机器人100d切入具有比移动机器人100c待命的待命位置933更高的优先级的待命位置932。这使得移动机器人100d可以在具有比移动机器人100c待命的待命位置933更高的优先级的待命位置932处待命。因此,移动机器人100d可以根据优先级在待命位置932处待命,并且可以在目的地908处顺利地进行递送等。
86.图6是图示出根据第一实施例的移动机器人100在设施900中的移动方法的平面图,并且示出了移动机器人100在向待命区域930移动时预订待命位置932的示例。移动机器人100b和移动机器人100c在待命区域930中待命。移动机器人100d通过例如电梯等向待命区域930移动。移动机器人100d的优先级低于移动机器人100b的优先级,且高于移动机器人100c的优先级。移动机器人100d通知正在待命区域930中待命的移动机器人100b和移动机器人100c,移动机器人100d将在待命区域930中待命。在这种情况下,如图6所示,具有较低优先级的移动机器人100c离开待命位置932并移动到待命位置933。因此,移动机器人100d预订了待命位置932。
87.如上所述,具有比正在待命区域930中待命的移动机器人100c更高的优先级的移动机器人100d在向待命区域930移动时,预订具有比移动机器人100c待命的待命位置933更高的优先级的待命位置932。之后,已经到达待命区域930的移动机器人100d在预订的待命位置932处待命。因而,向待命区域930移动的移动机器人100d可以根据优先级预订待命位置932,并且可以顺利地在目的地908处进行递送等。
88.在具有较高优先级的移动机器人100a完成在目的地908处的递送之后,正在待命区域930中待命的移动机器人100b至100d执行在目的地908处的递送。在这种情况下,移动机器人100的管理员可以会开展一些工作,例如接收被运输物体(或打开/关闭路径点909的门)。因此,优选的是提前向管理员通知待命信息,该待命信息包含诸如在待命区域930中待命的移动机器人100的数量、待命时间和发生的工作等信息。
89.然而,如果所有正在待命区域930中待命的移动机器人100单独通知管理员,则管理会变得复杂。因此,正在具有最高优先级的待命位置931处待命的移动机器人100b向管理员通知待命信息,该待命信息包含正在除了具有最高优先级的待命位置931以外的位置处待命的移动机器人100c和移动机器人100d的待命信息。因而,管理员可以提前接收到待命信息,为在目的地908处的工作做准备,减少收到的通知的数量,并减轻负担。
90.图7是图示出根据第一实施例的移动机器人100在设施900中的移动方法的平面图,并且其示出了移动机器人100和待命区域930具有标志信息的示例。如图7所示,设施900可以设置有多个待命区域940、950、960和970。待命区域940包含待命位置941和待命位置
942。待命区域950包含待命位置951和待命位置952。待命区域960包含待命位置961和待命位置962。待命区域970包含待命位置971。待命区域940、950、960和970被统称为待命区域930。
91.例如,待命区域940被设定为与清洁标志f1相关联的清洁区域。待命区域950被设定为与不清洁标志f2相关联的不清洁区域。待命区域960被设定为与通用标志f3相关联的通用区域。如上所述,设施900可以设置有被设定为清洁区域的待命区域940,被设定为不清洁区域的待命区域950,以及被设定为通用区域的待命区域960。此外,设施900可以包含没有与标志相关联的待命区域970。
92.与清洁标志f1相关联的移动机器人100b和移动机器人100c被允许进入与清洁标志f1相关联的待命区域940,但是被禁止进入与不清洁标志f2相关联的待命区域950。移动机器人100b和移动机器人100c可以被允许进入待命区域960,或者可以被允许进入待命区域970。
93.与不清洁标志f2相关联的移动机器人100f和移动机器人100g被允许进入与不清洁标志f2相关联的待命区域950,但是被禁止进入与清洁标志f1相关联的待命区域940。移动机器人100f和移动机器人100g可以被允许进入待命区域960,或者可以被允许进入待命区域970。
94.与通用标志f3相关联的移动机器人100d和移动机器人100e被允许进入与通用标志f3相关联的待命区域960。移动机器人100d和移动机器人100e可以被允许进入待命区域940和待命区域950。此外,移动机器人100d和移动机器人100e可以被允许进入待命区域970。
95.当移动机器人100与清洁标志f1相关联时,移动机器人100被禁止和与不清洁标志f2相关联的其他移动机器人100在同一待命区域930中待命。例如,当与清洁标志f1相关联的移动机器人100b正在待命区域960和待命区域970中待命时,与不清洁标志f2相关联的移动机器人100f被禁止在同一待命区域960和待命区域970中待命。当与不清洁标志f2相关联的移动机器人100f正在待命区域960和待命区域970中待命时,与清洁标志f1相关联的移动机器人100b被禁止在同一待命区域960和待命区域970中待命。
96.与清洁标志f1相关联的移动机器人100b已经在待命的待命区域960和待命区域970在预定时间段内被指定为清洁区域。因此,在该预定时间段内,与不清洁标志f2相关联的移动机器人100f不能在待命区域960和待命区域970中待命。与不清洁标志f2相关联的移动机器人100f已经在待命的待命区域960和待命区域970在预定时间段内被指定为不清洁区域。因此,在该预定时间段内,与清洁标志f1相关联的移动机器人100b不能在待命区域960和待命区域970中待命。
97.进一步地,待命区域960和待命区域970可以在预定时间被设定为清洁区域,并且可以在之后的预定时间被设定为不清洁区域。
98.当移动机器人100b与清洁标志f1相关联时,移动机器人100b远离与不清洁标志f2相关联的移动机器人100f预定距离以上。类似地,当移动机器人100f与不清洁标志f2相关联时,移动机器人100f远离与清洁标志f1相关联的移动机器人100b预定距离以上。通过这种配置,可以保持清洁度。
99.如上所述,多个移动机器人100包含与清洁标志f1或不清洁标志f2相关联的移动
机器人100。多个待命区域930包含与清洁标志f1或不清洁标志f2相关联的待命区域930。与清洁标志f1相关联的移动机器人100b在与清洁标志f1相关联的待命区域940的待命位置941和待命位置942处待命。与不清洁标志f2相关联的移动机器人100f在与不清洁标志f2相关联的待命区域950的待命位置951和待命位置952处待命。在与清洁标志f1相关联的待命区域940和与不清洁标志f2相关联的待命区域950之间,可以设置与不同于清洁标志f1和不清洁标志f2的标志(例如,通用标志f3)相关联的待命区域960。因而,与清洁标志f1相关联的待命区域930的清洁度可以被保持。
100.将参照流程图来描述上述移动机器人100的运行。图8是图示出根据第一实施例的移动机器人在设施900中的自主移动方法的流程图。
101.如图8的步骤s11所示,对移动机器人100进行优先级排序。具体地,通过分配给多个移动机器人100以用于在设施900中的目的地908处的工作或通过路径点909的优先级中的任何一个,对移动机器人100进行优先级排序。移动机器人100可以在向目的地908移动时被进行优先级排序,或者可以提前被进行优先级排序。
102.接下来,如步骤s12所示,移动机器人100向目的地908移动并到达目的地908。例如,移动机器人100基于搜索到的路线移动到目的地908。
103.接下来,如步骤s13所示,已经到达目的地908的移动机器人100判定是否存在移动机器人100正在目的地908处工作。例如,在目的地908处的工作是被运输物体的递送。在步骤s13中,例如,当存在移动机器人100a正在工作时,移动机器人100b和移动机器人100c在待命区域930中待命,如步骤s14所示。也就是说,当移动机器人100b和移动机器人100c具有较低的优先级时,移动机器人100b和移动机器人100c在待命区域930中待命,直到具有较高优先级的另一移动机器人100a完成工作。
104.在待命的时候,在待命区域930中,具有较高优先级的移动机器人100b从具有较高优先级的待命位置931开始使用待命位置用于待命。然后,处理返回到步骤s13。即,判定是否存在正在工作的移动机器人100a。当存在正在工作的移动机器人100a时,移动机器人100b在待命区域930中待命。
105.另一方面,在步骤s13中,当不存在正在工作的移动机器人100a时,如步骤s15所示,则判定在待命区域930中是否存在具有更高的优先级的移动机器人100。例如,移动机器人100c判定在待命区域930中是否存在具有更高的优先级的移动机器人100b。在步骤s15中,当在待命区域930中存在具有更高的优先级的移动机器人100b时,移动机器人100c在待命区域930中待命,如步骤s14所示。
106.在待命的时候,在待命区域930中,具有较高优先级的移动机器人100从具有较高优先级的待命位置931开始使用待命位置。例如,当具有较高优先级并正在具有较高优先级的待命位置931处待命的移动机器人100b转入在目的地908处工作并且具有较高优先级的待命位置931变为空置时,优先级变得更高的移动机器人100c移动到空置的待命位置931并待命。之后,处理返回到步骤s13,并重复步骤s14或步骤s15。
107.在步骤s15中,当待命区域930中不存在具有更高的优先级的移动机器人100时,移动机器人100c在目的地908处执行工作,如步骤s16所示。也就是说,移动机器人100c离开待命区域930并在目的地908处开始工作。通过这种方式,移动机器人100可以根据优先级在目的地908处执行工作。
108.在待命的时候,具有比正在待命区域930中待命的移动机器人100c更高的优先级的移动机器人100d可以在向待命区域930移动时预订待命位置932,该待命位置932具有比移动机器人100c待命的待命位置933更高的优先级。此外,具有比正在待命区域930中待命的移动机器人100c更高的优先级的移动机器人100d可以在到达待命区域930时,切入待命位置932,该待命位置932具有比移动机器人100c待命的待命位置933更高的优先级。
109.此外,与清洁标志f1相关联的移动机器人100b和移动机器人100c可以在与清洁标志f1相关的待命区域940的待命位置941和待命位置942处待命。与不清洁标志f2相关联的移动机器人100f和移动机器人100g可以在与不清洁标志f2相关联的待命区域950的待命位置951和待命位置952待命。
110.接下来,将描述本实施例的效果。当对目的地908的递送等的优先级较低时,本实施例的移动机器人100在待命区域930等当中待命,即使该移动机器人100比其他移动机器人100先到达目的地908。因而,可以从具有较高优先级的在后的移动机器人100开始执行递送。因此,可以创建高效的递送安排,并且可以提高移动效率。
111.待命位置931至933等根据到目的地908的距离等进行优先级排序。因此,待命状态的移动机器人100可以在被轮到时缩短从待命区域930移动到目的地908等的时间,并且可以创建高效的递送安排。此外,移动机器人100可以在向待命区域930移动时预订待命位置931至933等。因此,可以在到达待命区域930后立即在待命位置931至933等处待命,从而可以缩短待命时间。
112.移动机器人100、待命区域930等可以与清洁标志f1等相关联。由此,可以提高移动机器人100和待命区域930的清洁度。
113.第二实施例
114.接下来,将描述根据第二实施例的自主移动系统。根据本实施例的自主移动系统是控制在预定设施900中自主地移动的自主移动装置的系统。该自主移动系统将在“自主移动系统的配置”和“自主移动系统的运行”中分别描述。
115.自主移动系统的配置
116.自主移动系统包含移动机器人100。自主移动系统可以包含多个移动机器人100。此外,自主移动系统除了包含移动机器人100之外,还可以包含服务器装置300和设施相机400。
117.移动机器人
118.根据本实施例的移动机器人100的配置与上述第一实施例的配置相同。根据本实施例的移动机器人100可以使服务器装置300执行根据第一实施例的移动机器人100的一些功能。
119.例如,可以使服务器装置300针对设施900中在目的地908处的递送或通过路径点909对多个移动机器人100进行优先级排序。例如,可以使服务器装置300执行移动机器人100与清洁标志、不清洁标志和通用标志的关联。此外,可以使服务器装置300执行设施900中的待命区域930与清洁标志f1、不清洁标志f2和通用标志f3的关联。
120.服务器装置
121.服务器装置300例如是具有通信功能的计算机。服务器装置300可以安装在任何地方,只要服务器装置300能够与自主移动系统的各个配置通信。服务器装置300向多个移动
机器人100发送行进信息,并从多个移动机器人100处接收行进信息。
122.图9是图示出根据第二实施例的服务器装置300的框图。如图9所示,服务器装置300包含通信单元330、控制单元380,以及存储单元390。
123.通信单元330与移动机器人100独立地通信。通信单元330向控制单元380输出从各个配置接收到的信号。此外,通信单元330向各个配置适当地发送从控制单元380输出的信号。通信单元330可以包含用于在服务器装置300和多个配置之间执行通信的路由器装置。通信单元330可以具有多个通信装置,该多个通信装置对于与之彼此通信的各个部件都是不同的,以便与服务器装置300和各个配置进行通信。通信单元330可以经由内联网线路或因特网线路可通信地连接到各个配置。通信单元330可以向移动机器人100发送优先级信息和标志信息,以及从移动机器人100接收这些信息。此外,通信单元330可以从设施相机400接收目的地908和待命区域930的图像数据。
124.控制单元380由诸如cpu的算术装置进行配置并执行各种类型的信息处理。控制单元380可以针对设施900中的在目的地908处的工作或通过路径点909对各个移动机器人100进行优先级排序。控制单元380可以将移动机器人100和待命区域930与清洁标志、不清洁标志和通用标志相关联。此外,控制单元380从目的地908和待命区域930的图像数据中提取待命区域信息,该待命区域信息包含诸如待命状态的移动机器人100的数量、待命时间和待命位置的空置的信息。
125.存储单元390包含诸如闪存和ssd的非易失性存储器。存储单元390存储被移动机器人100用来自主移动的设施的楼层地图。此外,存储单元390存储移动机器人100的优先级信息。存储单元390还存储移动机器人100和待命区域930的标志信息。存储单元390连接到控制单元380,并响应于来自控制单元380的请求,将存储的信息输出到控制单元380。
126.自主移动系统的运行
127.接下来,将描述自主移动系统的运行。图10是图示出根据第二实施例的自主移动系统的运行的时序图。
128.如图10中的步骤s201所示,服务器装置300针对设施900中的在目的地908的工作或通过路径点909对多个移动机器人100进行优先级排序。此外,如步骤s202所示,服务器装置300将多个移动机器人100和多个待命区域930与标志f1至f3相关联。
129.如步骤s203所示,设施相机400可以拍摄目的地908和待命区域930的图像,并且如步骤s204所示,将图像数据发送到服务器装置300。服务器装置300接收图像数据,并且如步骤s205所示提取待命区域信息,该待命区域信息包含诸如在待命区域930中待命的移动机器人100的数量、待命时间和待命位置的空置的信息。
130.接下来,如步骤s206所示,服务器装置300将优先级信息、标志信息和待命区域信息发送给移动机器人100。在接收到这些类型的信息后,移动机器人100向目的地908等移动并到达目的地908等,如步骤s207所示。
131.接下来,如步骤s208所示,移动机器人100判定是否存在移动机器人100在目的地908处工作。此外,如步骤s209所示,判定在待命区域930中是否存在具有更高的优先级的移动机器人100。当存在正在工作的移动机器人100时,或者当在待命区域930中存在具有更高的优先级的移动机器人100时,移动机器人100在待命区域930中待命,如步骤s210所示。此时,根据到目的地908的距离进行优先级排序的多个待命位置931至933被用于从具有较高
优先级的待命位置931至933开始进行待命。
132.在步骤s208中,当不存在正在工作的移动机器人100时,以及在步骤s209中,当待命区域930中不存在具有更高的优先级的移动机器人100时,移动机器人100在目的地908处执行工作。通过这种方式,自主移动系统中的移动机器人100可以在目的地908处执行工作,例如,在目的地908处递送被运输物体。
133.根据本实施例,服务器装置300可以对多个移动机器人100进行优先级排序。此外,服务器装置300可以将移动机器人100和待命区域930与标志f1至f3相关联。因此,可以减少移动机器人100上的负载,并且还可以提高移动机器人100的处理速度。
134.由于服务器装置300可以集中控制多个移动机器人100的运行,因此可以调整各个移动机器人100的运行,并且可以提高整个系统的移动效率。其他配置、运行和效果都包含在第一实施例的描述中。
135.本发明不限于上述实施例,并且在不脱离精神的情况下可以适当地修改。例如,第一实施例和第二实施例的配置的组合也包含在本实施例的技术思想的范围内。另外,下文所描述的自主移动方法、自主移动程序和存储自主移动程序的存储介质也包含在本实施例的技术思想的范围内。
136.附录1
137.一种用于在设施中自主移动的自主移动装置的自主移动方法,该自主移动方法包括:
138.在对于在设施中在目的地处工作或通过路径点为多个自主移动装置分配的优先级中,为自主移动装置分配其中一个优先级的步骤;以及
139.当自主移动装置具有较低优先级时,使自主移动装置在预定的待命区域待命,直到具有较高优先级的另一自主移动装置完成工作或通过的步骤。
140.附录2
141.根据附录1的自主移动方法,其中:
142.待命区域具有根据到目的地或路径点的距离进行优先级排序的多个待命位置;并且
143.在使自主移动装置在预定的待命区域中待命的步骤中,从具有较高优先级的待命位置开始,将该待命区域用于待命。
144.附录3
145.根据附录2的自主移动方法,其中在使自主移动装置在预定的待命区域中待命的步骤中,当自主移动装置具有比正在待命区域中待命的另一自主移动装置更高的优先级时,该自主移动装置在向待命区域移动时,预订具有比另一自主移动装置待命的待命位置更高的优先级的待命位置。
146.附录4
147.根据附录2的自主移动方法,其中在使自主移动装置在预定的待命区域待命的步骤中,当自主移动装置具有比正在待命区域中待命的另一自主移动装置更高的优先级时,该自主移动装置在到达待命区域时,切入具有比另一自主移动装置待命的待命位置更高的优先级的待命位置。
148.附录5
149.根据附录3或4的自主移动方法,其中,当在具有最高优先级的待命位置待命时,自主移动装置向自主移动装置的管理员通知待命信息,该待命信息包含正在除具有最高优先级的待命位置以外的待命位置处待命的自主移动装置的待命信息。
150.附录6
151.根据附录2至5中任一项的自主移动方法,其中:
152.该自主移动装置包含与清洁标志或不清洁标志相关联的自主移动装置;
153.在设施中设置有多个待命区域;
154.这些待命区域包含与清洁标志或不清洁标志相关联的待命区域;并且
155.在使自主移动装置在预定的待命区域中待命的步骤中,当与清洁标志相关联时,自主移动装置在与清洁标志相关联的待命区域中的待命位置待命,而当与不清洁标志相关联时,自主移动装置在与不清洁标志相关联的待命区域中的待命位置待命。
156.附录7
157.根据附录6的自主移动方法,其中在与清洁标志相关联的待命区域和与不清洁标志相关联的待命区域之间,设置有与不同于清洁标志和不清洁标志的标志相关联的待命区域。
158.附录8
159.一种用于在设施中自主移动的自主移动装置的自主移动程序,该自主移动程序使计算机执行:
160.在对于在设施中在目的地处工作或通过路径点为多个自主移动装置分配的优先级中,为自主移动装置分配其中一个优先级;以及
161.当自主移动装置具有较低的优先级时,使自主移动装置在预定的待命区域中待命,直到具有较高优先级的另一自主移动系统完成工作或通过。
162.附录9
163.根据附录8的自主移动程序,其中:
164.待命区域具有根据到目的地或路径点的距离进行优先级排序的多个待命位置;并且
165.在使自主移动装置在预定的待命区域中待命时,从具有较高优先级的待命位置开始将该待命区域用于待命。
166.附录10
167.根据附录9的自主移动程序,使计算机执行:在使自主移动装置在预定的待命区域中待命时,当自主移动装置具有比正在待命区域中待命的另一自主移动装置更高的优先级时并且当该自主移动装置向待命区域移动时,预订具有比另一自主移动装置待命的待命位置更高的优先级的待命位置。
168.附录11
169.根据附录9的自主移动程序,使计算机执行:在使自主移动装置在预定的待命区域中待命时,当自主移动装置具有比正在待命区域中待命的另一自主移动装置更高的优先级时并且当该自主移动装置到达待命区域时,切入具有比另一自主移动装置待命的待命位置更高的优先级的待命位置。
170.附录12
171.根据附录10或11的自主移动程序,使计算机执行:当自主移动装置在具有最高优先级的待命位置待命时,向自主移动装置的管理员通知待命信息,该待命信息包含正在除具有最高优先级的待命位置以外的待命位置待命的自主移动装置的待命信息。
172.附录13
173.根据附录9至12中任一项的自主移动程序,其中:
174.该自主移动装置包含与清洁标志或不清洁标志相关联的自主移动装置;
175.在设施中设置有多个待命区域;
176.该待命区域包含与清洁标志或不清洁标志相关联的待命区域;并且
177.在使自主移动装置在预定的待命区域中待命时,所述自主移动程序使计算机执行:当自主移动装置与清洁标志相关联时,使自主移动装置在与清洁标志相关联的待命区域中的待命位置处待命;并且当自主移动装置与不清洁标志相关联时,使自主移动装置在与不清洁标志相关联的待命区域中的待命位置处待命。
178.附录14
179.根据附录13的自主移动程序,其中在与清洁标志相关联的待命区域和与不清洁标志相关联的待命区域之间,设置有与不同于清洁标志和不清洁标志的标志相关联的待命区域。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。