1.本发明涉及罐式容器技术领域,特别涉及一种底阀遥控装置、罐体及罐式集装箱。
背景技术:
2.罐式集装箱的底阀配备有遥控结构,以用于在紧急状态下遥控开关底阀。遥控结构通常通过运动一定行程而实现底阀的开关,因而该遥控结构对安装空间要求高,安装灵活度低,不便于罐体底部空间的布置。
技术实现要素:
3.本发明的目的在于解决现有技术的罐式集装箱中,遥控结构对安装空间要求高,安装灵活度低,不便于罐体底部空间的布置的技术问题。
4.为解决上述技术问题,本发明提供一种底阀遥控装置,包括联动件和遥控件,联动件的一端用于与罐式集装箱的底阀连接,以驱动所述底阀的驱动轴绕其自身的轴线转动;遥控件包括遥控把手和驱动连杆,所述驱动连杆连接在所述联动件的另一端,所述遥控把手可转动地连接在所述驱动连杆背离所述联动件的端部,所述遥控把手的转动轴线与所述驱动连杆的轴线共线;所述遥控把手转动带动所述驱动连杆转动,以驱动所述联动件转动,从而带动所述底阀的驱动轴转动,以使所述底阀打开或关闭。
5.可选地,所述底阀遥控装置还包括万向联轴器,所述驱动连杆与所述联动件的端部通过所述万向联轴器连接。
6.可选地,所述驱动连杆的轴线与所述联动件的轴线呈设定夹角设置,所述设定夹角为0
°
~45
°
。
7.可选地,所述联动件包括套筒接头和转接连杆,所述套筒接头两端开口且内部中空,所述套筒接头的轴线与所述驱动轴的轴线平行,用于驱动所述驱动轴转动;所述转接连杆的端部与所述套筒接头连接固定,所述转接连杆远离所述套筒接头的一端与所述驱动连杆连接。
8.可选地,所述底阀还包括手柄,所述手柄与所述驱动轴连接,以驱动所述驱动轴绕其自身的轴线转动;所述套筒接头远离所述转接连杆的一端的侧壁上开设有卡接口,所述手柄卡接固定在所述卡接口中;所述套筒接头转动带动所述手柄转动,使所述驱动轴绕其自身的轴线转动,以使所述底阀打开或关闭。
9.可选地,所述联动件包括套筒接头和转接连杆,所述套筒接头的一端开口;所述转接连杆的一端同轴固定在所述套筒接头的开口端中,所述转接连杆的另一端与所述驱动连杆连接;所述套筒接头背离所述转接连杆的一端的端面上开设有与所述驱动轴外周形状相适配的轴孔,所述驱动轴固定在所述轴孔中;所述套筒接头转动带动所述驱动轴转动,以使所述底阀打开或关闭。
10.可选地,所述联动件为一体成型结构,所述遥控把手与所述驱动连杆一体成型。
11.可选地,所述底阀遥控装置还包括次级遥控件,所述次级遥控件具有设定长度;所
述次级遥控件与所述遥控把手连接,以驱动所述遥控把手转动。
12.本发明还提供一种罐体,靠近所述罐体底部的位置设有底阀,所述罐体上还设有上述的底阀遥控装置,所述联动件与所述底阀连接,并与所述底阀的驱动轴同轴设置。
13.本发明还提供一种罐式集装箱,其包括框架和上述的罐体,所述罐体由所述框架支撑。
14.由上述技术方案可知,本发明的有益效果为:
15.本发明的底阀遥控装置、罐体以及罐式集装箱中,当转动遥控把手时,遥控把手带动驱动连杆转动,以驱动联动件转动,从而带动与联动件连接的底阀的驱动轴转动,以实现底阀的打开或关闭。底阀遥控装置整体结构紧凑,传动效率高,并且能够将底阀的驱动转换成转动驱动,无需直线驱动行程,不会局限于罐体底部底阀附近狭窄的安装空间,可以实现遥控把手安装位置的灵活布置,从而便于工作人员的操作。
附图说明
16.图1是本发明底阀遥控装置一实施例的结构示意图;
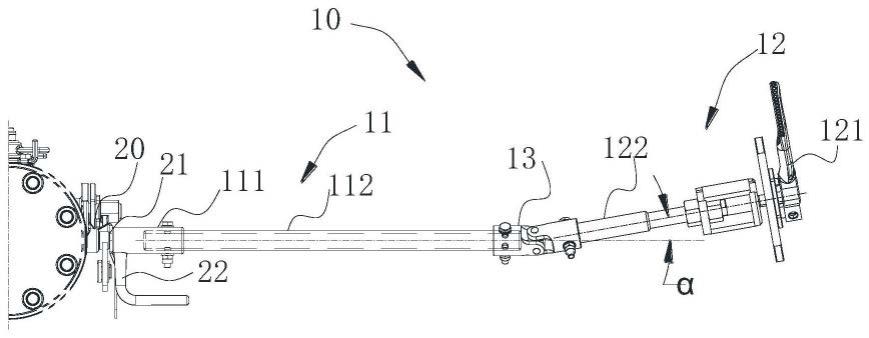
17.图2是图1所示的底阀遥控装置使用状态的示意图;
18.图3是图1所示的底阀遥控装置中联动件的结构示意图;
19.图4是本发明底阀遥控装置其他实施例中套筒接头的截面图;
20.图5是图1所示的底阀遥控装置中次级遥控件的结构示意图。
21.附图标记说明如下:10、底阀遥控装置;11、联动件;111、套筒接头;112、转接连杆;114、卡接口;115、轴孔;12、遥控件;121、遥控把手;122、驱动连杆;13、万向联轴器;14、次级遥控件;20、底阀;21、驱动轴;22、手柄。
具体实施方式
22.体现本发明特征与优点的典型实施方式将在以下的说明中详细叙述。应理解的是本发明能够在不同的实施方式上具有各种的变化,其皆不脱离本发明的范围,且其中的说明及图示在本质上是当作说明之用,而非用以限制本发明。
23.为了进一步说明本发明的原理和结构,现结合附图对本发明的优选实施例进行详细说明。
24.参阅图1和图2,本技术一实施例提供一种底阀遥控装置10,其主要应用于罐式容器中,用于实现罐式容器上底阀20的打开和关闭。在本实施例中,该底阀遥控装置10包括联动件11和遥控件12。
25.具体地,联动件11一端用于与底阀20连接,以驱动底阀20的驱动轴21绕其自身的轴线转动。遥控件12包括遥控把手121和驱动连杆122,驱动连杆122连接在联动件11的另一端,遥控把手121可转动地连接在驱动连杆122背离联动件11的端部,该遥控把手121的转动轴线与驱动连杆122的轴线共线。
26.遥控把手121转动带动驱动连杆122转动,以驱动联动件11转动,从而带动底阀20的驱动轴21转动,以使底阀20打开或关闭。
27.进一步地,本实施例的联动件11包括套筒接头111和转接连杆112。其中,套筒接头111两端开口且内部中空。转接连杆112的一端穿设固定在套筒接头111端部的内部,另一端
与驱动连杆122连接。
28.在本实施例中,与联动件11连接的底阀20还包括手柄22。手柄22与底阀20的驱动轴21垂直连接。手柄22转动,可使驱动轴21绕其自身的轴线转动,以使底阀20打开或关闭。
29.如图3所示,套筒接头111远离转接杆的一端的侧壁上开设有卡接口114,底阀20的手柄22卡接在该卡接口114中。套筒接头111与手柄22卡接固定后,套筒接头111的轴线与驱动轴21的轴线平行。
30.套筒接头111在转接连杆112的驱动下转动时,套筒接头111会驱动与之卡接的手柄22绕套筒接头111的轴线转动。由于手柄22与底阀20的驱动轴21连接,手柄22转动会带动驱动轴21绕其自身的轴线转动,从而实现底阀20的打开和关闭。
31.参阅图4,除上述所示的套筒接头111的结构外,在其他实施例中,该套筒接头111还可以设置成一端开口,另一端端面开设有轴孔115的结构。底阀20与此种结构的底阀遥控装置10配合时,底阀20上可省去手柄22的设置。
32.其中,转接连杆112的一端同轴固定在套筒接头111的开口端中,另一端与驱动连杆122连接,以向套筒接头111传递驱动连杆122的驱动力。驱动连杆122转动会带动与之连接的转接连杆112转动,以驱动套筒接头111转动。
33.套筒接头111端面上开设的轴孔115与驱动轴21的外周形状相适配,底阀20的驱动轴21穿设固定在套筒接头111端面的轴孔115中。在本实施例中,轴孔115的形状可以为不规则或者规则的形状,可以呈凸轮状,齿轮状、正方形、多边形等,在此不再一一例举,只要能够保证套筒接头111转动驱动该驱动轴21转动即可。
34.套筒接头111在转接连杆112的驱动下转动时,套筒接头111会直接带动与之连接的驱动轴21转动,使驱动轴21绕其自身的轴线转动,从而实现底阀20的打开和关闭。
35.套筒接头111与转接连杆112可以通过紧固件连接,也可以直接通过焊接固定。该紧固件可以为销轴或者螺栓。此外,套筒接头111与转接连杆112还可以一体成型,即联动件11为一体成型的结构。将联动件11设置成一体成型的结构,可便于联动件11与遥控件12的装配,利于底阀遥控装置10的整体组装。
36.进一步地,转接连杆112远离套筒接头111的一端与驱动连杆122连接。在本实施例中,底阀遥控装置10还包括万向联轴器13,该转接连杆112与驱动连杆122通过万向联轴器13连接。
37.转接连杆112、驱动连杆122与万向联轴器13之间可以通过紧固件连接,也可以直接通过焊接固定。紧固件可以为销轴或者螺栓。其中,驱动连杆122的轴线与转接连杆112的轴线呈设定夹角设置。在本实施例中,设定夹角α为0
°
~45
°
。
38.转接连杆112与驱动连杆122通过万向联轴器13连接,可以使转接连杆112与驱动连杆122的轴线不在同一直线上,使转接连杆112与驱动连杆122存在轴线夹角的布置。此种设置不仅能够使底阀遥控装置10整体结构紧凑,具有较大的角向补偿能力,传动效率更高,而且能够实现驱动连杆122与转接连杆112之间分段倾斜角度的安装,安装灵活性更强,不会局限于底阀20附近狭窄的空间,可以相应地抬高或者转向驱动连杆122的位置,以使遥控把手121的位置抬高或转向,实现遥控把手121安装位置的灵活布置,从而便于工作人员的操作。
39.在本实施例中,遥控把手121连接在驱动连杆122远离转接连杆112的端部。遥控把
手121的转动轴线与驱动连杆122的轴线共线,操作遥控把手121转动,可带动驱动连杆122绕其自身的轴线转动,从而带动转接连杆112和套筒接头111转动。
40.本实施例的遥控把手121与驱动连杆122可以一体成型,即遥控件12为一体成型的结构。此种设置可便于遥控件12与联动件11的装配,利于底阀遥控装置10的整体组装。
41.如图5所示,在本实施例中,底阀遥控装置10还包括次级遥控件14,该次级遥控件14与遥控把手121连接。可以根据遥控距离的需要,将次级遥控件14设置设定长度,以实现更远距离的遥控,在远离实现底阀20的开关,使底阀20控制更加灵活。
42.本实施例的次级遥控件14可以为钢丝绳等柔性结构,也可以为次级连杆、次级把手等刚性结构。在此不过过多限定,只要能够保证在设定距离的条件下,次级遥控件14能够控制遥控把手121转动,从而实现远距离控制即可。
43.当次级遥控件14拉动遥控把手121转动时,遥控把带动驱动连杆122转动。驱动连杆122与转接连杆112通过万向联轴器13连接,即使驱动连杆122与转接连杆112非同轴布置,驱动连杆122转动仍会带动与之连接的转接连杆112转动,以使与转接连杆112固定的套筒接头111转动。由于套筒接头111与底阀20的手柄22或底阀20的驱动轴21连接,转动的套筒接头111会带动驱动轴21运动,使驱动轴21绕其自身的轴线转动,以实现底阀20的打开或关闭。
44.本技术还提供一种罐体,靠近罐体底部的位置设有底阀20。该罐体上还设有上述的底阀遥控装置10,底阀遥控装置10中的联动件11与底阀20连接,以驱动底阀20的驱动轴21绕其自身的轴线转动。
45.当需要打开或关闭底阀20时,可以通过转动遥控把手121实现。遥控把手121转动,会通过驱动连杆122和转接连杆112将转动驱动力传递至套筒接头111,使套筒接头111驱动底阀20的驱动轴21转动,以使底阀20打开或关闭。
46.此外,本技术还提供一种罐式集装箱,该罐式集装箱包括框架和上述的罐体,罐体由框架支撑。
47.对于本技术的底阀遥控装置、罐体以及罐式集装箱,当转动遥控把手时,遥控把手带动驱动连杆转动,以驱动联动件转动,从而带动与联动件连接的底阀的驱动轴转动,以实现底阀的打开或关闭。底阀遥控装置整体结构紧凑,传动效率高,并且能够将底阀的驱动转换成转动驱动,无需直线驱动行程,不会局限于罐体底部底阀附近狭窄的安装空间,可以实现遥控把手安装位置的灵活布置,从而便于工作人员的操作。
48.虽然已参照几个典型实施方式描述了本发明,但应当理解,所用的术语是说明和示例性、而非限制性的术语。由于本发明能够以多种形式具体实施而不脱离发明的精神或实质,所以应当理解,上述实施方式不限于任何前述的细节,而应在随附权利要求所限定的精神和范围内广泛地解释,因此落入权利要求或其等效范围内的全部变化和改型都应为随附权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
