1.本发明涉及一种水面机械手及补偿方法,尤其涉及一种具有主被动波浪补偿功能的水面机械手及补偿方法。
背景技术:
2.随着时代的发展,科技的进步,人类探索的目光不仅仅聚集在陆地,而是逐渐聚焦于海洋。但是海洋的恶劣环境阻挡了人类探索海洋的脚步,各类船舶、作业平台受到风浪、洋流的作用无法进行作业,因此在进行水面作业时会受到很大的影响。传统的机械手在水面抓取目标物体时,会因为水的流速从而影响抓取时的准确度,即便抓取目标物体以后,由于自身的需求需要保持在水下相对静止,这时很可能因为水的流动速度较大导致抓取的目标物体挣脱出抓取装置或者直接导致机械手部分断裂,从而造成直接的经济损失。且目前尚无运用主被动式波浪补偿作为水面机械手作业装置的技术。
技术实现要素:
3.发明目的:本发明目的是提供一种具有主被动波浪补偿功能的水面机械手及补偿方法,在抓取目标物体后,进行被动补偿,保证抓取装置平台相对静止。
4.技术方案:本发明包括机械手作业装置,所述机械手作业装置的顶部安装有下底板,所述下底板上连接有波浪补偿系统,所述波浪补偿系统的顶部转动连接有上底板,所述的上底板上安装有吊机,所述的波浪补偿系统包括多个第一从动件和伸缩缸,所述第一从动件和伸缩缸的顶部分别与上底板转动连接,第一从动件底部与第二从动件顶部转动连接,所述的第二从动件内滑动连接有第三从动件,所述第三从动件底部与下底板转动连接,所述第二从动件的一侧设有开口,所述伸缩缸从该侧开口伸入第二从动件,并与第二从动件内的第三从动件转动连接,多个第二从动件之间通过固定装置连接。
5.所述的机械手作业装置包括机械手和磁性体,所述的机械手和磁性体分别与下底板固定连接。
6.所述的磁性体内设有多个导电线圈,通过导电线圈可以定向的吸取目标物体。
7.所述的磁性体外表面采用不同面体,可以根据目标物体特定的形状来改变磁性表面的形状,从而达到与目标物体完全接触的要求,有利于机械手的抓取。
8.所述的第二从动件内设有导轨,导轨内滑动连接有第三从动件,所述的导轨外部设有位移传感器,保证伸缩缸运行时,第三从动件相对于第二从动件的运动为直线运动,并且可以测量出第三从动件的位移。
9.所述的吊机与船体转动连接,便于将装置投入海中或者收取至船舶上。
10.所述的机械手作业装置抓取目标物体的方式为先固定后抓取。
11.一种具有主被动波浪补偿功能的水面机械手的补偿方法,包括主动补偿方法和被动补偿方法。
12.所述的主动补偿方法为:通过惯导传感器测量出船体的横摇、纵摇和升沉姿态信
息,通过控制器的波浪补偿反解算法计算出三个运动方向的补偿值,通过控制伸缩缸的运动,进而控制第三从动件的运动轨迹,从而对下底板进行主动补偿。
13.所述的被动波浪补偿方法为:当目标物体抓取以后,对伸缩缸进行通电,同时将伸缩缸刹车打开,此时伸缩缸可以自由的伸缩,同时控制固定装置,使其控制杆可自由伸缩。
14.有益效果:本发明通过主动波浪补偿系统与被动波浪补偿系统相结合的方式对整个机械手作业装置进行补偿,其中,主动式补偿系统主要应用于抓取过程中,而被动式补偿系统主要用于抓取结束以后,通过主被动波浪补偿方法可以实现机械作业装置一直处于相对静止的状态,可拆卸式一体化磁性体可以根据目标物体特定的形状来改变磁性表面的形状,从而达到与目标物体完全接触的要求,有利于机械手的抓取。
附图说明
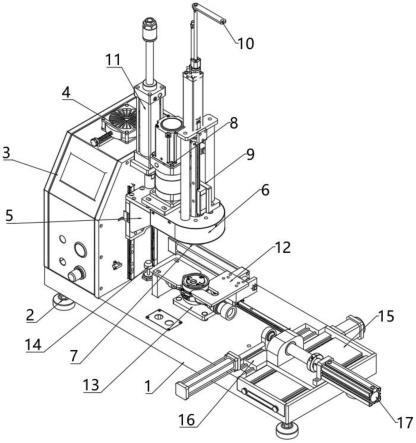
15.图1为本发明的整体结构示意图;
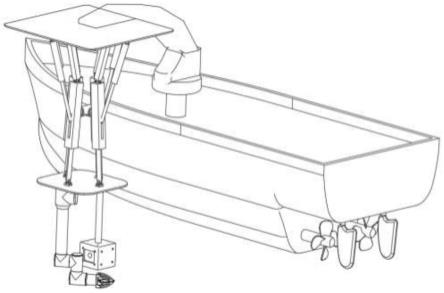
16.图2为本发明的主视图;
17.图3为本发明的主被动波浪补偿结构示意图;
18.图4为本发明的机械手作业装置示意图;
19.图5为本发明的磁性体内部结构示意图;
20.图6为本发明的磁性体外部结构示意图。
具体实施方式
21.下面结合附图对本发明作进一步说明。
22.如图1至图6所示,本发明包括上底板1、吊机2、波浪补偿系统3、下底板4、船体5和机械手作业装置6,其中,波浪补偿系统3顶部连接有上底板1,上底板1通过8个旋转副与波浪补偿系统3连接,旋转副的连接件为能满足一定强度的抗腐蚀、抗氧化的金属件,以保证在运行过程中不会发生断裂、破损等现象。波浪补偿系统3底部连接有下底板4,波浪补偿系统3通过4个万向节与下底板4连接,万向节的材质要求同上,满足波浪补偿时达到的角度要求。下底板4底部固定有机械手作业装置6,采用固定连接保证两者之间不会出现相对位移。上底板1顶部固定有吊机2,保证两者受到海浪的影响一致,吊机2与船体5之间通过单自由度旋转副连接,便于将装置投入海中或者收取至船舶上。船体5上装有惯导传感器,通过检测船体运动的姿态,进而控制波浪补偿系统3做出相应的运动。
23.如图3所示,波浪补偿系统3包括四个第一从动件11和四个伸缩缸13,伸缩缸13外侧套有缸套12,第一从动件11及缸套12顶部分别通过旋转副与上底板1连接,第一从动件11底部与第二从动件15的顶部通过旋转副转动连接,第二从动件15内设有导轨,导轨内滑动连接有第三从动件16,第三从动件16底部通过万向节与下底板4连接。第二从动件15一侧设有开口,伸缩缸13从该侧开口伸入第二从动件15,并与第二从动件15内的第三从动件16转动连接。导轨外部设有位移传感器,保证伸缩缸13运行时,第三从动件16相对于第二从动件15的运动为直线运动,并且可以测量出第三从动件16的位移。四个第二从动件15之间通过可伸缩的固定装置14连接,固定装置14与四个第二从动件15通过旋转副连接,该固定装置14具有可控性,可以针对主被动两种补偿方式做出相应的操作。
24.波浪补偿系统3中所有从动件均采用重量较轻且耐腐蚀性强的铝钛合金,在介质
中会形成氧化膜,从而提高在海水中的耐用性。使用重量轻的材质是被动波浪补偿中比较关键的一步,轻重量的杆件在海中会随着水流一起流动,从而实现被动补偿。
25.如图4所示,机械手作业装置6抓取目标物体的方式为先固定,后抓取,包括机械手21和磁性体22,机械手21和磁性体22均固定在下底板4上。机械手21具有多自由度功能,可以实现多方位的抓取物体,磁性体22采用可拆卸式一体化磁性体,与下底板4在运动时为相对静止。磁性体22与机械手21上均安装有微型高清摄像头,在吸引目标物体时,可根据摄像头来查看目标位置。抓取目标时,首先需要磁性体22将目标吸引到表面,此时目标物体与机械手21为相对静止状态,通过机械手21来抓取目标物体时不需要进行波浪补偿即可完成,此方法可解决水下物体抓取时受到波浪影响的难题。
26.磁性体22为一个金属外壳,其外壳内主要有一对十字交叉的金属体,金属体上匝有一定数量的线圈,形成多个导电线圈31,如图5所示,通过导电线圈31可以定向的吸取目标物体,当机械手作业装置6需要在多个聚集的物体中选择对应的目标时,此时根据目标物体的方位来对导电线圈31进行导电,根据电磁感应定律,可以在某一面或者多面产生强磁,从而达到吸取物体的目的。当吸取错误物体时,只需停止供电,则可释放错误物体并且重新吸取物体即可。
27.如图6所示,磁性体22采用六面体结构,可以通过5个面来吸取目标物体,其中2个面为凹面,3个面为平面。在每个面上均有4个螺纹孔,针对不同的目标物体而采用不同的面体,可以实现多种接触面,从而能实现百分百的接触。当目标物体的接触面为外凸形状时,可以针对此形状加工一个完全拟合的模具,将该模具装入磁性体凹面,并且通过螺栓或者其他方式紧固,以此来达到接触完全拟合的目的。同理,当目标物体的接触面为内凹形状时,加工一个凸型的模具装入磁性体平面,也可达到拟合的目的。最终保证目标物体可牢牢吸固在磁性体上,以此达到机械手能相对静止的抓取物体的目的。
28.本发明的波浪补偿系统3应用在目标物体抓取过程中与抓取完成后两个阶段,包括主动补偿方式和被动补偿方式,其主要的补偿方法如下:
29.主动波浪补偿方法:通过惯导传感器测量出船体5的横摇、纵摇和升沉姿态信息,通过控制器的波浪补偿反解算法计算出三个运动方向的补偿值,通过控制4个伸缩缸13的运动,进而控制第三从动件16的运动轨迹,从而对下底板4进行主动补偿。
30.被动波浪补偿方法:当目标物体抓取以后,对伸缩缸13进行通电,同时将伸缩缸13刹车打开,此时伸缩缸13可以自由的伸缩,同时控制固定装置14,使其控制杆可自由伸缩。由于从动件采用的材质较轻,因此在海水中会随着海浪一起移动,但由于下底板4与机械手作业装置6相对较重,因而受到的影响相对较小,此时上底板1和波浪补偿系统3虽然会受到海浪的影响而产生运动,但并不会影响整个机械抓取装置,从而实现被动补偿。
31.本发明通过对机械手作业装置进行主动补偿,保证在抓取目标物体时抓取平台相对静止,同时在抓取目标物体以后,进行被动补偿,保证抓取装置平台也相对静止;同时,机械手抓取装置可以实现多方位的选择抓取,并且针对特定的目标物体,可以实现可拆卸式一体化功能。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。