1.本发明涉及非标自动化领域,特别涉及一种用于非标自动化的自动上料与组装设备。
背景技术:
2.在自动化生产中,有这样的一类产品需要进行组装:盖体件和主体件,需要将盖体件拧紧在主体件上进行连接组装,盖体件和主体件通常是通过螺纹连接。例如,饮料瓶(主体件)与瓶盖(盖体件)的组装、罐头瓶(主体件)与罐头盖(盖体件)的组装、化妆品瓶体(主体件)与瓶盖(盖体件)的组装等等。现有生产中,部分是采用人工进行组装,但效率低、工作量大,不符合自动化生产的需求。也出现了一些自动化组装设备,例如专利cn201920187717.x公开的一种拧盖机、专利cn201822091143.4公开的一种全自动拧盖机等。现有的自动化组装设备通常不具有自动化供料功能,需要另外配置供料设备。另外,盖体件通常由正反面之分,组装时一般只能采用正面的盖体件直接与主体件连接,反面的盖体件则需要人工剔除,不符合高效自动化的生产需求;或是再通过专门的设备将其转换为正面状态再进行组装,这样容易导致设备结构过于复杂。
3.所以,现在有必要提供一种更可靠的方案。
技术实现要素:
4.本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种用于非标自动化的自动上料与组装设备。
5.为解决上述技术问题,本发明采用的技术方案是:一种用于非标自动化的自动上料与组装设备,包括:上料机构,其用于提供盖体件;第一输送机构,其接收所述上料机构提供的盖体件并使多个盖体件以单列排布的方式输送至下一个作业位置;盖体件正反识别与剔除机构,其用于对第一输送机构上的盖体件的正反面状态进行逐一识别,并将为反面状态的盖体件剔除并输送回所述上料机构;组装机构,其设置在所述第一输送机构的输出端;分料机构,其设置在所述第一输送机构上,用于使所述第一输送机构上的盖体件以具有间隔的方式进入所述组装机构的作业位置;以及第二输送机构,其用于将主体件提供至所述所述组装机构的作业位置,以通过所述组装机构将盖体件以一一配合的方式组装至所述主体件上;其中,正面状态的盖体件为:盖体件上用于与主体件连接的结构处于下方,反面状态的盖体件为:盖体件上用于与主体件连接的结构处于上方。
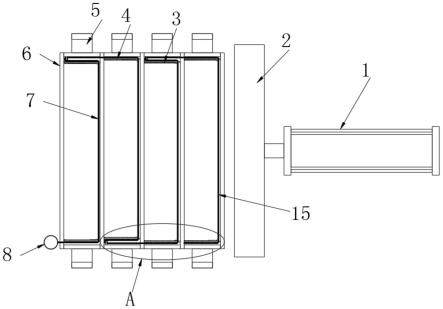
6.优选的是,所述第一输送机构包括皮带输送机、设置在所述皮带输送机的输出端的第一输送轨道以及设置在所述第一输送轨道的输出端的第二输送轨道;
所述皮带输送机的皮带宽度以及第一输送轨道和第二输送轨道的轨道宽度设置使得多个盖体件只能以单列排布的方式在所述第一输送机构上沿x方向输送;所述第一输送轨道包括设置在所述皮带输送机的输出端的水平轨道部以及与所述水平轨道部连接的斜坡轨道部;所述斜坡轨道部的高度由所述水平轨道部朝所述第二输送轨道的方向逐渐降低,所述第二输送轨道的高度由所述第一输送轨道朝所述第二输送机构的方向逐渐降低。
7.优选的是,所述盖体件正反识别与剔除机构包括设置在所述水平轨道部上的推送模块、设置在所述推送模块上的识别模块以及连接在所述水平轨道部上的回料轨道;所述识别模块用于对经过其下方的盖体件的正反面状态进行逐一识别,所述推送模块用于将被识别为反面状态的盖体件沿y方向推送至所述回料轨道上,所述回料轨道用于将识别为反面状态的盖体件输送回所述上料机构中。
8.优选的是,所述推送模块包括连接在所述水平轨道部上的安装板、设置在所述安装板上的驱动件、与所述驱动件的输出轴连接的推送头以及连接在所述推送头底面的推片,所述推片正对所述回料轨道的入口端,所述驱动件用于驱动所述推送头沿y方向进行往复运动。
9.优选的是,所述识别模块包括设置在所述推送头的底面的信号发射模块以及与所述信号发射模块连接的识别控制芯片;所述水平轨道部上处于所述信号发射模块的正下方开设有通孔,所述通孔的尺寸大于所述信号发射模块的发射探头的尺寸且小于所述盖体件的尺寸,所述通孔的位置为处于所述推送头正下方的水平轨道部区域的中部;所述识别控制芯片用于根据所述信号发射模块接收到信号发射模块发出的信号的反射信号的时间判断处于所述推送头下方的盖体件的正反面状态,并对所述推送模块进行控制,所述识别控制芯片的工作方法为:1)预先进行以下测量:所述通孔上方无盖体件,所述信号发射模块的发射探头发出的信号穿过所述通孔后被所述通孔下方的阻挡物反射而返回,记录此时信号发出到信号返回所用的时间t1;所述通孔上方覆盖有反面状态的盖体件,所述信号发射模块的发射探头发出的信号被所述该盖体件的底面反射后返回,记录此时信号发出到信号返回所用的时间t2;所述通孔上方覆盖有正面状态的盖体件,所述信号发射模块的发射探头发出的信号被所述该盖体件的上表面反射后返回,记录此时信号发出到信号返回所用的时间t3;则有t3<t2<t1;2)工作时,所述信号发射模块的发射探头发出信号,并记录信号发出到信号返回所用的时间t;若a1*t3≤t≤a2*t1,则判断通孔上方覆盖有反面状态的盖体件,所述识别控制芯片控制所述推送模块工作,使所述推送头沿y方向向前推出,通过所述推片将通孔上方的反面状态的盖体件推入所述回料轨道的入口端;其中a1和a2为预先设定的修订系数,且a2<1<a1;否则,判断通孔上无盖体件或通孔上方覆盖有正面状态的盖体件,所述推送模块不进行动作。
10.优选的是,所述上料机构包括上料壳体、设置在所述上料壳体上的料斗以及设置
在所述上料壳体内的阶梯上料装置,所述料斗的底板通过接料底板与所述阶梯上料装置的上料端连接;所述接料底板的底部设置有顶翻机构,所述接料底板上开设有若干顶杆孔,所述顶翻机构包括设置在所述上料壳体内的电动推杆、连接在所述电动推杆上的转接板以及连接在所述转接板上且可穿过所述顶杆孔向上伸出所述接料底板的若干顶料杆,所述顶料杆用于向上顶起处于所述接料底板上的盖体件,以使处于反面状态的盖体件在被顶起过程中翻转至正面状态。
11.优选的是,所述第一输送轨道的下方还设置有震动机构,所述震动机构包括连接在所述上料壳体上的安装架、设置在所述安装架上的若干震动器以及连接在若干震动器上的震动座,所述震动座的上端与所述第一输送轨道的水平轨道部连接。
12.优选的是,所述组装机构包括组装机架、设置在所述组装机架上的y向直线位移机构、设置在所述y向直线位移机构上的z向直线位移机构、设置在所述z向直线位移机构上的旋转驱动机构以及设置在所述旋转驱动机构上的夹爪;所述y向直线位移机构用于驱动所述夹爪沿y向运动,所述z向直线位移机构用于驱动所述夹爪沿z向运动,所述旋转驱动机构用于驱动所述夹爪绕z向旋转;所述第二输送轨道将主体件沿y方向单排逐一输送至所述夹爪的下方,所述第二输送轨道上还设置有夹持组件;所述夹爪用于夹持处于其正下方的第二输送轨道上的盖体件,并组装至所述第二输送机构输送来的主体件上,所述夹持组件用于在所述盖体件和主体件进行组装的过程中对所述主体件进行固定,以使得所述夹爪通过驱动盖体件边旋转边向下运动的过程中固定连接到所述主体件上。
13.优选的是,所述第二输送轨道的末端内部开设有安装槽,所述分料机构包括由所述第二输送轨道表面向下开设的贯通至所述安装槽的驱动孔、可上下滑动设置在所述驱动孔内的驱动座、由所述第二输送轨道底面向上开设的贯通至所述安装槽的导向孔、连接在所述驱动座底部的可滑动插设在所述导向孔内的导向柱、与所述导向柱可转动连接的第一驱动杆、与所述第一驱动杆的末端通过第一弹簧连接的第二驱动杆、与所述第二驱动杆的末端连接的阻挡片、由所述第二输送轨道表面向下开设的贯通至所述安装槽的供所述阻挡片插入并向上伸出的阻挡孔以及连接在所述驱动座和所述安装槽的底面之间的若干第二弹簧;所述安装槽的底面设置有与所述第一驱动杆的中部可转动连接的第一支柱,所述所述安装槽的上部内壁上设置有与所述第二驱动杆的中部可转动连接的第二支柱;所述驱动座处于所述夹爪的夹持口的正下方,所述夹爪的底部设置有处于所述夹爪的夹持口的外围的驱动片,所述第二输送轨道开设有可容纳所述夹爪的夹爪槽;当所述夹爪向下伸入所述夹爪槽,抓取处于所述驱动座上的盖体件时,所述夹爪底部的驱动片向下挤压所述驱动座,并通过所述第一驱动杆、第二驱动杆的作用使得处于所述第二驱动杆末端的阻挡片向下缩入所述阻挡孔中;当所述夹爪对所述驱动座不施加作用力时,所述阻挡片向上伸出所述阻挡孔,对处于所述阻挡片的远离所述驱动座的一侧的盖体件形成阻挡。
14.优选的是,所述驱动座上的远离所述第一输送轨道的一侧设置有定位挡片,当所
述盖体件沿输送方向移动至与所述定位挡片接触时,该盖体件正好处于所述夹爪的夹持口的正下方。
15.本发明的有益效果是:本发明能够实现盖体件和主体件的自动上料和自动组装,自动化程度高,能提高生产效率;本发明通过设置盖体件正反识别与剔除机构能够同时实现盖体件的正反面状态的识别以及反面状态的盖体件的剔除,可满足后续组装作业的需求,提高效率;本发明通过设置顶翻机构能够在供料阶段使多数反面状态的盖体件转变为正面状态,提高正面状态盖体件的占比,进而提高盖体件的输送效率;本发明通过设置分料机构不仅能够使处于夹取位置的盖体件左右具有一定的空间,以便于夹爪工作;同时,夹爪夹取过程中,通过驱动座向下移动压缩第二弹簧,还能够缓冲夹爪的作用力,即保证夹爪能够顺利夹取下方的盖体件,又能防止夹爪向下移动过度而损坏夹爪或第二轨道,所以能够降低夹爪向下移动至极限位置的定位精度。
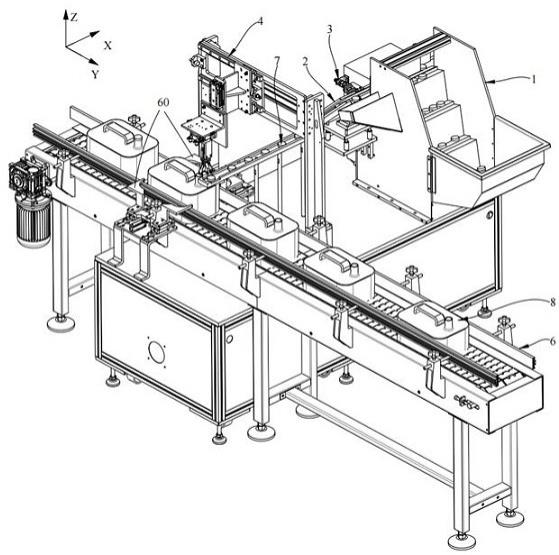
附图说明
16.图1为本发明的用于非标自动化的自动上料与组装设备的结构示意图;图2为本发明的第一输送机构的结构示意图;图3为本发明的第一输送机构与上料机构配合的结构示意图;图4为本发明的盖体件正反识别与剔除机构的结构示意图;图5-7为本发明的识别模块的工作原理示意图;图8为本发明的上料机构的结构示意图;图9为本发明的上料机构的另一个视角的结构示意图;图10-12为本发明的顶翻机构的工作原理示意图;图13为本发明的组装机构的结构示意图;图14为本发明的组装机构的另一个视角的结构示意图;图15为本发明的旋转驱动机构的结构示意图;图16为本发明的分料机构与夹爪配合的结构示意图;图17为本发明的分料机构处于一种状态的结构示意图;图18为本发明的分料机构处于另一种状态的结构示意图。
17.附图标记说明:1—上料机构;10—上料壳体;11—料斗;12—阶梯上料装置;13—接料底板;14—顶翻机构;130—顶杆孔;140—电动推杆;141—转接板;142—顶料杆;120—定板;121—动板;122—推动机构;123—电机;124—驱动板;125—驱动杆;126—滑块组件;127—滑轨组件;128—倾斜下料板;2—第一输送机构;20—皮带输送机;21—第一输送轨道;22—第二输送轨道;23—震动机构;200—皮带;210—水平轨道部;211—斜坡轨道部;212—通孔;220—安装槽;221—夹爪槽;230—安装架;231—震动器;232—震动座;3—盖体件正反识别与剔除机构;30—推送模块;31—识别模块;32—回料轨道;300—安装板;301—驱动件;302—推送头;303—推片;320—入口端;310—发射探头;
4—组装机构;40—组装机架;41—y向直线位移机构;42—z向直线位移机构;43—旋转驱动机构;44—夹爪;440—驱动片;420—z向滑轨;421—z向滑块;422—z向电动推杆;430—转接板;431—旋转齿条;432—旋转轴;433—旋转齿轮;434—旋转电动推杆;5—分料机构;50—驱动孔;51—驱动座;52—导向孔;53—导向柱;54—第一驱动杆;55—第一弹簧;56—第二驱动杆125;57—阻挡片;58—阻挡孔;59—第二弹簧;501—第一支柱;502—第二支柱;520—定位挡片;6—第二输送机构;60—夹持组件;7—盖体件;8—主体件。
具体实施方式
18.下面结合实施例对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
19.应当理解,本文所使用的诸如“具有”、“包含”以及“包括”术语并不排除一个或多个其它元件或其组合的存在或添加。
20.实施例1如图1-2所示,本实施例的一种用于非标自动化的自动上料与组装设备,包括:上料机构1,其用于提供盖体件7;第一输送机构2,其接收上料机构1提供的盖体件7并使多个盖体件7以单列排布的方式输送至下一个作业位置;盖体件7正反识别与剔除机构3,其用于对第一输送机构2上的盖体件7的正反面状态进行逐一识别,并将为反面状态的盖体件7剔除并输送回上料机构1;组装机构4,其设置在第一输送机构2的输出端;分料机构5,其设置在第一输送机构2上,用于使第一输送机构2上的盖体件7以具有间隔的方式进入组装机构4的作业位置;以及第二输送机构6,其用于将主体件8提供至组装机构4的作业位置,以通过组装机构4将盖体件7以一一配合的方式组装至主体件8上;其中,正面状态的盖体件7为:盖体件7上用于与主体件8连接的结构处于下方,反面状态的盖体件7为:盖体件7上用于与主体件8连接的结构处于上方。
21.其中,盖体件7与主体件8通过螺纹连接方式组装。
22.在本实施例中,以盖体件7为瓶盖、主体件8为瓶体为例进行说明。
23.本实施例中,第一输送机构2包括皮带200输送机20、设置在皮带200输送机20的输出端的第一输送轨道21以及设置在第一输送轨道21的输出端的第二输送轨道22;皮带200输送机20的皮带200宽度以及第一输送轨道21和第二输送轨道22的轨道宽度设置使得多个盖体件7只能以单列排布的方式在第一输送机构2上沿x方向输送;即在宽度方向上只能允许一个盖体件7通过;第一输送轨道21包括设置在皮带200输送机20的输出端的水平轨道部210以及与水平轨道部210连接的斜坡轨道部211;斜坡轨道部211的高度由水平轨道部210朝第二输送轨道22的方向逐渐降低,第二
输送轨道22的高度由第一输送轨道21朝第二输送机构6的方向逐渐降低。
24.皮带200输送机20将上料机构1提供盖的体件以一定的速度输送至第一输送轨道21的水平轨道部210上,然后依靠惯性进入斜坡轨道部211,再倾斜向下滑落进入第二输送轨道22,最终输送至组装机构4的工作位置。
25.在一种优选的实施例中,第一输送轨道21的下方还设置有震动机构23,震动机构23包括连接在上料壳体10上的安装架230、设置在安装架230上的若干震动器231以及连接在若干震动器231上的震动座232,震动座232的上端与第一输送轨道21的水平轨道部210连接。通过震动机构23对第一输送轨道21施加震动,能够利于盖体件7顺利输送。
26.实施例2参照图3-7,在一种优选的实施例中,盖体件7有正反之分,只有正面盖体件7在后续的组装机构4中能够藉由夹爪44直接组装到主体件8上,所以需要对盖体件7的正反进行识别,并对反面盖体件7进行剔除,本发明中,通过盖体件7正反识别与剔除机构3实现,本实施例中,对该机构进行了进一步改进,具体的如下。
27.盖体件7正反识别与剔除机构3包括设置在水平轨道部210上的推送模块30、设置在推送模块30上的识别模块31以及连接在水平轨道部210上的回料轨道32;识别模块31用于对经过其下方的盖体件7的正反面状态进行逐一识别,推送模块30用于将被识别为反面状态的盖体件7沿y方向推送至回料轨道32上,回料轨道32用于将识别为反面状态的盖体件7输送回上料机构1中。
28.其中,推送模块30包括连接在水平轨道部210上的安装板300、设置在安装板300上的驱动件301、与驱动件301的输出轴连接的推送头302以及连接在推送头302底面的推片303,推片303正对回料轨道32的入口端320,驱动件301用于驱动推送头302沿y方向进行往复运动。
29.其中,识别模块31包括设置在推送头302的底面的信号发射模块以及与信号发射模块连接的识别控制芯片;水平轨道部210上处于信号发射模块的正下方开设有通孔212,通孔212的尺寸大于信号发射模块的发射探头310的尺寸且小于盖体件7的尺寸,通孔212的位置为处于推送头302正下方的水平轨道部210区域的中部;识别控制芯片用于根据信号发射模块接收到信号发射模块发出的信号的反射信号的时间判断处于推送头302下方的盖体件7的正反面状态,并对推送模块30进行控制,识别控制芯片的工作方法为:1)参照图5-7,预先进行以下测量:通孔212上方无盖体件7,信号发射模块的发射探头310发出的信号穿过通孔212后被通孔212下方的阻挡物反射而返回,记录此时信号发出到信号返回所用的时间t1,参照图5;通孔212上方覆盖有反面状态的盖体件7,信号发射模块的发射探头310发出的信号被该盖体件7的底面反射后返回,记录此时信号发出到信号返回所用的时间t2,参照图6;通孔212上方覆盖有正面状态的盖体件7,信号发射模块的发射探头310发出的信号被该盖体件7的上表面反射后返回,记录此时信号发出到信号返回所用的时间t3,参照图7;则有t3<t2<t1;
2)工作时,信号发射模块的发射探头310发出信号,并记录信号发出到信号返回所用的时间t;若a1*t3≤t≤a2*t1,则判断通孔212上方覆盖有反面状态的盖体件7,识别控制芯片控制推送模块30工作,使推送头302沿y方向向前推出,通过推片303将通孔212上方的反面状态的盖体件7推入回料轨道32的入口端320;其中a1和a2为预先设定的修订系数,且a2<1<a1;否则,判断通孔212上无盖体件7或通孔212上方覆盖有正面状态的盖体件7,推送模块30不进行动作。
30.其中,发射探头310既能发出信号同时也能接受返回的信号。信号发射模块可为红外发射器或超声波发射器等,在本实施例中,为超声波发射器,通过超声波发射器来对是否有盖体件7以及盖体件7的正反面状态进行识别。主要原理为:盖体件7是一个具有一个盖口的盖状物体,以瓶盖为例,假设平放时瓶盖的高度为h,瓶盖底面/表面厚度为h1,盖口的深度为h2,则h=h1 h2;瓶盖表面或盖口底面可反射信号,记为反射面。所以在相同高度的水平轨道部210上平放时,正面状态(盖口朝向,如图7)和反面状态(盖口朝上,如图6)时,反射面与发射探头310之间的距离d是不同的,正面状态时距离d小于反面状态是的距离d,差值为h2,故发射探头310的信号发出到信号返回所用的时间比热不同(正面状态用时小于反面状态),从而能够据此判断正反面状态。当下方无盖体件7时,发射的信号会经过通孔212到达下方的障碍物(本实施例中,为下方的震动座232的上表面)后再返回,此时用时最长,所以也能据此判断下方是否有盖体件7。
31.其中,在理想状态,盖体件7为正面时,t=t3;盖体件7为正面时,t=t2;无盖体件7时,t=t1;但考虑到不同盖体件7之间的高度、盖口的深度等反面存在的误差,以及信号发射模块对于信号发出到信号返回所用的时间计算的误差,t不一定会正好为上述三个值之一,所以,通过设置修订系数a1和a2,当t在一定范围时,即判断为相关状态,能够更加适应实际使用。在一种实施例中,可a1=1.5,a2=0.5。
32.通过上述方法,即可通过简单的算法和结构同时实现盖体件7的正反面状态的识别以及反面状态的盖体件7的剔除。
33.实施例3参照图8-12,作为实施例1或实施例2的基础上的进一步改进,本实施例中,上料机构1包括上料壳体10、设置在上料壳体10上的料斗11以及设置在上料壳体10内的阶梯上料装置12,料斗11的底板通过接料底板13与阶梯上料装置12的上料端连接。
34.其中,阶梯上料装置12采用常规产品即可,例如cn202558887u公开的感应透热设备阶梯上料机构1中的阶梯上料组件或cn206842568u公开的螺栓自动上料机用的阶梯上料机构1等或其相同原理的类似机构,本发明中不做具体限制。为便于理解,以一种可选的实施例中采用的阶梯上料装置12为例进行简要说明,参照图,该阶梯上料装置12包括相互平行设置的若干定板120和动板121,若干定板120和动板121均倾斜设于上料壳体10内的一侧,定板120固定于上料壳体10侧壁上,动板121相对于定板120进行上下移动,定板120的最高处位于皮带200输送机20的皮带200的上部(即皮带200输送机20的输入端),动板121移动至最低位时,动板121的最高处位于料斗11的底部;动板121后侧设有推动机构122,推动机构122包括电机123、与电机123的输出轴连接的驱动板124、与驱动板124可转动连接的驱动杆125、与驱动杆125可转动连接的滑块组件126以及与滑块组件126配合的滑轨组件127,滑
轨组件127固接在上料壳体10上,处于最高处的动板121的侧部设置有倾斜下料板128,用于将该动板121上的盖体件7通过重力作用输送至皮带200输送机20的皮带200上。电机123工作,带动驱动板124转动,在通过驱动杆125带动滑块组件126动作,由于滑轨组件127与滑块组件126的配合,使得滑块组件126只能进行上下往复的直线运动,从而带动若干动板121进行上下往复运动,最终使得料斗11内因重力作用移动到接料底板13上的盖体件7会呈阶梯方式逐级上升,输送至最高位置并下落到皮带200输送机20的皮带200上,实现阶梯上料。由于定板120和动板121均倾斜设置,动板121上的盖体件7能在重力作用下,下落到相邻的动板121右侧的定板120上,而当该定板120右侧的另一动板121向下移动至低于或与该定板120齐平的位置时,该定板120上的盖体件7在传递至其右侧的动板121上,从而通若干次传递,使盖体件7从最低处逐层抬高到达最高层的动板121上,最后在重力作用下,沿倾斜下料板128下落至皮带200输送机20的皮带200上。
35.本实施例中,接料底板13的底部设置有顶翻机构14,接料底板13上开设有若干顶杆孔15,顶翻机构14包括设置在上料壳体10内的电动推杆140、连接在电动推杆140上的转接板141以及连接在转接板141上且可穿过顶杆孔15向上伸出接料底板13的若干顶料杆142,顶料杆142用于向上顶起处于接料底板13上的盖体件7,以使处于反面状态的盖体件7在被顶起过程中翻转至正面状态。其中,顶杆孔15的尺寸小于盖体件7。
36.接料底板13上的盖体件7正反面状态是随机的,理论上应当各占50%,这样必将有50%的盖体件7要返回上料壳体10,然后继续供料,这样势必导致供料效率降低,所以需要尽量提升正面状态的盖体件7的占比。本实施例中,通过设置顶翻机构14能够实现。
37.上料过程中,顶翻机构14保持工作,若干顶料杆142间歇的以一定速率上下运动进行顶出和缩入的动作,以对接料底板13上的若干盖体件7进行随机顶起,其主要目的在于,使反面状态的盖体件7翻转至正面状态,而正面状态的盖体件7则保持正面。其原理为:参照图10,正面状态和反面状态的盖体件7上料至接料底板13上,顶料杆142穿过顶杆孔15向上伸出,会顶起顶杆孔15上方的盖体件7,在大多数情况下会经历如下状态:1、对于正面状态的盖体件7,顶料杆142上升时,顶料杆142深入盖体件7的盖孔内,依靠盖孔内壁与顶料杆142接触支撑,使盖体件7挂在顶料杆142上,然后随顶料杆142下降后再以原姿态回落至接料底板13上,即仍然保持正面状态,如图11-12中正面状态的盖体件7;2、对于反面状态的盖体件7,顶料杆142上升时,顶料杆142顶起盖体件7的表面,盖体件7边向下运动边相对顶料杆142滑动,从而出现翻转,转变为正面状态下落至接料底板13上,如图11-12中反面状态的盖体件7。
38.从而能够使多数反面状态的盖体件7转变为正面状态,提高正面状态盖体件7的占比,进而提高有效盖体件7的输送效率。其中,需要理解的是,顶料杆142只需要也只能使多数反面状态的盖体件7转变为正面状态,但即便如此,也能够实现上述功能。
39.实施例4参照图13-15,作为以上任意一个实施例的基础上的进一步改进,本实施例中,组装机构4包括组装机架40、设置在组装机架40上的y向直线位移机构41、设置在y向直线位移机构41上的z向直线位移机构42、设置在z向直线位移机构42上的旋转驱动机构43以及设置在旋转驱动机构43上的夹爪44;
y向直线位移机构41用于驱动夹爪44沿y向运动,z向直线位移机构42用于驱动夹爪44沿z向运动,旋转驱动机构43用于驱动夹爪44绕z向旋转;第二输送轨道22将主体件8沿y方向单排逐一输送至夹爪44的下方,第二输送轨道22上还设置有夹持组件60;夹爪44用于夹持处于其正下方的第二输送轨道22上的盖体件7,并组装至第二输送机构6输送来的主体件8上,夹持组件60用于在盖体件7和主体件8进行组装的过程中对主体件8进行固定,以使得夹爪44通过驱动盖体件7边旋转边向下运动的过程中固定连接到主体件8上。
40.其中,y向直线位移机构41、z向直线位移机构42均采用常规的位移机构即可,如直线滑轨,以z向直线位移机构42为例,在一种实施例中,z向直线位移机构42包括z向滑轨420、设置在z向滑轨420上的z向滑块421以及用于驱动z向滑块421移动的z向电动推杆422。
41.旋转驱动机构43包括连接在z向滑块421上的转接板430、设置在转接板430上的旋转齿条431、可转动设置在转接板430上的旋转轴432、连接在旋转轴432上且与旋转齿条431啮合的旋转齿轮433以及用于驱动旋转齿条431往复直线移动的旋转电动推杆434,夹爪44连接在旋转轴432上。旋转电动推杆434推动旋转齿条431进行往复直线运动,使得与旋转齿条431啮合的旋转齿轮433进行正反旋转,从而实现旋转轴432的正反旋转,最终实现夹爪44的正反旋转,以通过夹爪44实现盖体件7的扭转动作,以将盖体件7扭转连接在主体件8上。
42.实施例5参照图16-18,作为以上任意一个实施例的基础上的进一步改进,本实施例中,第二输送轨道22的末端内部开设有安装槽200,分料机构5包括由第二输送轨道22表面向下开设的贯通至安装槽200的驱动孔50、可上下滑动设置在驱动孔50内的驱动座51、由第二输送轨道22底面向上开设的贯通至安装槽200的导向孔52、连接在驱动座51底部的可滑动插设在导向孔52内的导向柱53、与导向柱53可转动连接的第一驱动杆54、与第一驱动杆54的末端通过第一弹簧55连接的第二驱动杆56、与第二驱动杆56的末端连接的阻挡片57、由第二输送轨道22表面向下开设的贯通至安装槽200的供阻挡片57插入并向上伸出的阻挡孔58以及连接在驱动座51和安装槽200的底面之间的若干第二弹簧59;安装槽200的底面设置有与第一驱动杆54的中部可转动连接的第一支柱501,安装槽200的上部内壁上设置有与第二驱动杆56的中部可转动连接的第二支柱502;驱动座51处于夹爪44的夹持口的正下方,夹爪44的底部设置有处于夹爪44的夹持口的外围的驱动片440,第二输送轨道22开设有可容纳夹爪44的夹爪44槽221;当夹爪44向下伸入夹爪44槽221,抓取处于驱动座51上的盖体件7时,夹爪44底部的驱动片440向下挤压驱动座51,并通过第一驱动杆54、第二驱动杆56的作用使得处于第二驱动杆56末端的阻挡片57向下缩入阻挡孔58中;当夹爪44对驱动座51不施加作用力时,阻挡片57向上伸出阻挡孔58,对处于阻挡片57的远离驱动座51的一侧的盖体件7形成阻挡。
43.驱动座51上的远离第一输送轨道21的一侧设置有定位挡片520,当盖体件7沿输送方向移动至与定位挡片520接触时,该盖体件7正好处于夹爪44的夹持口的正下方。
44.从利于夹爪44夹取盖体件7的角度来说,希望第二输送轨道22上输送的盖体件7是以相互具有一定间隔的方式进入夹爪44下方,以避免夹取盖体件7时被其右侧相邻的盖体
件7影响,或是损坏相邻的盖体件7。但第二输送轨道22上的盖体件7在自然输送时,是容易以相互接触、无间距的方式进入的,所以本实施例中,通过分料机构5来实现具有间隔的供料方式,以便于夹爪44的工作,具体原理为:在正常状态下,第二弹簧59对驱动座51具有一定的拉力和支持作用的,驱动座51保持与第二输送轨道22的表面水平或略低于第二输送轨道22的表面,第一驱动杆54、第二驱动杆56也基本保持水平,而阻挡片57是伸出阻挡孔58的,能够阻挡右侧的盖体件7在重力作用下沿倾斜的第二输送轨道22向左移动;当夹爪44要夹取下方的盖体件7时,夹爪44先向下移动并顶压驱动座51,第二弹簧59被压缩,导向柱53带动第一驱动杆54的左端向下移动,第一驱动杆54逆时针旋转,然后通过第一弹簧55向上挤压第二驱动杆56的左端,第一驱动杆54顺时针旋转,第一驱动杆54右端下转,从而使阻挡片57向下缩入阻挡孔58,解除对右侧盖体件7的阻挡作用,右侧的盖体件7在重力作用下沿倾斜的第二输送轨道22向左滑动,越过阻挡孔58;当夹爪44向上收回时,第二弹簧59的弹力作用使驱动座51、第一驱动杆54、第二驱动杆56相继复位,阻挡片57重新向上伸入阻挡孔58,阻挡右侧的盖体件7;已经越过阻挡孔58的该盖体件7则可滑动至驱动座51上并与定位挡片520接触,滑动到位,在下一次夹爪44下移时,即可夹取该盖体件7,而后续便继续有一个盖体件7越过阻挡片57进入到夹爪44的夹取位置,从而能够使得每次处于夹爪44正下方的盖体件7与其右侧的盖体件7都具有一定的距离。
45.其中,当夹爪44首次夹取时,下方是没有盖体件7的,可通过人工放置一个,或是使夹爪44做一次“空取”动作,即只向下挤压驱动座51,而不夹取盖体件7,以使得阻挡片57右侧的一个盖体件7能进入并滑动到驱动座51上,以供下一次夹取。
46.本实施例中,通过上述结构设置,不仅能够使处于夹取位置的盖体件7左右具有一定的空间,以便于夹爪44工作,同时,通过驱动座51向下移动压缩第二弹簧59,还能够缓冲夹爪44的作用力,即保证夹爪44能够顺利夹取下方的盖体件7,又能防止夹爪44向下移动过度而损坏夹爪44或第二轨道,所以能够降低夹爪44向下移动至极限位置的定位精度。
47.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。