技术特征:
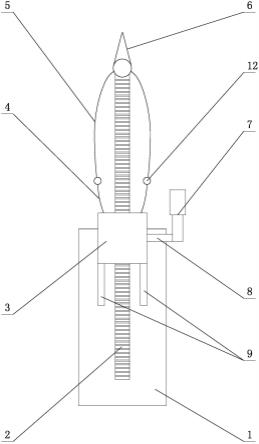
1.一种纸浆模塑餐具半自动设备加装机器人自动转移切边设备,其特征在于,包括转移机器人(1)、纸浆模塑餐具半自动设备(2)、切边设备(3)和堆叠机器人(4);其中,纸浆模塑餐具半自动设备(2)设置在转移机器人(1)的正前方,纸浆模塑餐具半自动设备(2)包括一个成型工位(21),成型工位(21)的两侧分别设置有左热压定型工位(22)和右热压定型工位(23);切边设备(3)设置在转移机器人(1)的左侧,并面向转移机器人(1),切边设备(3)包括一个切边工位(31);转移机器人(1)通过前后移动进入成型工位(21)、左热压定型工位(22)、右热压定型工位(23)或切边工位(31);转移机器人(1)通过左右平移由成型工位(21)前方交替地平移至左热压定型工位(22)和右热压定型工位(23)前方;转移机器人(1)通过90度转动转向切边工位(31);转移机器人(1)通过向下移动取出成型工位(21)上的湿坯制品,或者将湿坯制品放置在左热压定型工位(22)或右热压定型工位(23)上;转移机器人(1)通过向上移动取下左热压定型工位(22)或右热压定型工位(23)上干坯制品,或者将干坯制品放置在切边工位(31)上;堆叠机器人(4)设置在切边设备(3)的右侧,堆叠机器人(4)的右侧设置有堆叠工位;堆叠机器人(4)通过左右平移、翻转和上下移动将切边设备(3)上的切边后的干坯制品转移至堆叠工位上。2.如权利要求1所述的纸浆模塑餐具半自动设备加装机器人自动转移切边设备,其特征在于,转移机器人(1)包括第一回转底座(11),第一回转底座(11)上固定连接有大臂安装座(12),大臂安装座(12)前端通过转轴连接有实现前后移动的大臂(13),大臂安装座(12)后端通过转轴连接有推动缸(14),推动缸(14)与大臂(13)的一端连接,大臂(13)的另一端通过转轴连接有小臂安装座(15),小臂安装座(15)上转动连接有小臂(16),小臂(16)的端部通过转轴连接有朝下设置的湿坯转移模板(17),湿坯转移模板(17)上固定连接有朝上设置的第一干坯吸盘架(18)。3.如权利要求1所述的纸浆模塑餐具半自动设备加装机器人自动转移切边设备,其特征在于,成型工位(21)设置有用于吸附纸浆的下成型模具,以及与下成型模具合模并将纸浆负压抽湿为湿坯制品的上成型模具;左热压定型工位(22)和右热压定型工位(23)均设置有用于放置湿坯制品的下定型模具,以及与下定型模具合模并将湿坯制品热压定型为干坯制品的上定型模具,且上定型模具吸附干坯制品。4.如权利要求1所述的纸浆模塑餐具半自动设备加装机器人自动转移切边设备,其特征在于,切边设备(3)设置有用于吸附干坯制品的上切边模具,以及用于实现切边的下切边模具。5.如权利要求1所述的纸浆模塑餐具半自动设备加装机器人自动转移切边设备,其特征在于,堆叠机器人(4)包括第二回转底座(41),第二回转底座(41)上固定连接有第一安装座(42),第一安装座(42)通过转轴连接有机械臂(43),机械臂(43)的端部通过转轴连接有第二安装座(44),第二安装座(44)上转动连接有夹具(45),夹具(45)上通过转轴连接有第二干坯吸盘架(46)。
技术总结
本实用新型提供了一种纸浆模塑餐具半自动设备加装机器人自动转移切边设备,纸浆模塑餐具半自动设备的前方设置转移机器人,切边设备面向转移机器人的左侧,堆叠机器人在切边设备的右侧,转移机器人通过前后移动、左右平移、90度转动、上下移动将湿坯制品由成型工位转移至左热压定型工位和右热压定型工位,将干坯制品移至切边工位,堆叠机器人通过左右平移、翻转和上下移动取出切边后的干坯制品。本实用新型加装转移机器人实现湿坯制品在成型工位和热压定型工位之间的转移,无需内部加装转移湿坯的轨道,解决了合模的精度问题,并将干坯制品转移到切边设备,通过堆叠机器人将切边后的干坯制品进行收集,完成了全自动转移过程,提高了生产效率。高了生产效率。高了生产效率。
技术研发人员:苏炳龙 姜自才
受保护的技术使用者:泉州中乾机械有限公司
技术研发日:2022.04.06
技术公布日:2022/7/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。