1.本发明涉及一种用于对通过电驱动器驱动的车轮进行滑移调节的方法和设备。
背景技术:
2.具有直接作用于各个车轮的电驱动器的电动车辆能够实现对各个车轮的单独的操控,其也被称为车轮驱动。可以通过电驱动器进行车轮制动,其具有将动能作为电能回收或收回。在此,电驱动器可以直接或通过传动装置作用在车轮上。此外,通常设置有摩擦制动器,其在商用车中构造为气动制动器。
3.尤其是当在行驶情况下应该传输比轮胎和道路之间的摩擦值所允许的更大的纵向和横向力时,可能会发生不稳定。在制动时,通常在车轮上执行abs干预,其中识别抱死倾向,从而通过适当地操控摩擦制动器,在考虑到最大允许的滑移值的情况下防止车轮抱死。因此,可以调整车轮专属的制动力,并且将车轮滑移调节到适当的滑移值,其中可以在车轮与道路之间传输最大的力。因此,通过这种方法保持可转向性、即横向力的传输。
4.然而,在具有车轮专属地作用的电驱动器和补充的摩擦制动器的系统中会出现问题。因此,电驱动器的再生制动力矩、即回收导致车轮的抱死倾向。在确定了这种抱死倾向时,通常切断能量回收,并且执行仅通过摩擦制动器作用的abs调节机构,以便确保行驶稳定。
5.系统之间的这种切换通常是复杂的,并且此外在能量方面不是最佳的。在abs调节方法中,不会利用用于快速构造正和负的转矩的电驱动器的可能性。
6.de 10 2017 211 436 a1描述了一种用于操控用于车辆的电动机的方法和设备,其中,代表电动机的额定转速的额定转速值改变一个转速步长,并且检测由电动机提供的转矩。然而由此,尤其可以出现在侧向引导方面的问题;此外,由此必要时设定不匹配于速度水平的车轮速度。
7.de 10 2011 100 814 a1涉及一种用于具有电动车辆驱动器的车辆的驱动滑移调节的装置,其中,车轮的电驱动马达分别由可控的转换器供电,其中,asr控制装置为每个转换器提供相关的驱动马达的最大允许的转速,用以控制转速。因此,这种调节尤其可以限制驱动滑移。
8.de 10 2014 210 537 a1描述了一种用于运行具有内燃机和电机的混合动力车辆的方法,其中,电机可以在发电机运行模式下运行,并且可以在增加或减少车轮驱动的情况下执行安全措施。在此设置有一种用于保持两个驱动器的驱动力矩之和的恒定的模式。
9.de 10 2010 003 076 a1描述了一种用于调节具有电驱动器的车辆的车轮制动滑移的方法和系统,其中,制动信号由滑移调节装置检测,并且随后操控电驱动调节装置和摩擦制动调节装置。因此,可以在考虑到车轮滑移的情况下执行再生制动。
10.jp 2018018697 a描述了一种用于具有滑移调节的四轮电动车辆的abs。
11.us 2004/0176899 a示出了一种对施加到机动车的多个车轮上的转矩的控制,其中,设置有转速传感器和偏航率加速度传感器。在此,此外在车辆的横向对置的侧面上确定需要的、要施加到各自的车轮上的转矩,以便调节车轮滑移并且产生围绕车辆的偏航轴线
的修正力矩。此外,可以考虑到驾驶员力求达到的用于调节的额定值。
12.在ep 1 849 745 b1中,设置有一种对车辆的制动力和驱动力的控制,其中,记录驾驶员期望,并且获知额定制动/驱动力和额定偏航力矩,其应该通过要施加到轮胎上的制动/驱动力产生。为此设置有偏航率传感器。
13.ep 2 612 716 b1描述了一种用于车辆的制动力控制装置,其具有能够将电磁驱动力或制动力施加到车轮的电力产生机构,其中附加地,设置有用于施加机械制动力的制动力产生机构。此外,设置有一种路面状态检测装置,其中,基于检测到的数据获知车轮的抱死倾向。
14.这些方法和系统最初通常能够实现对车轮滑移的纵向调节;然而在此,通常不考虑或仅略微考虑侧向引导。一些方法部分也是非常复杂的,或者需要并非在每个车辆中都提供的附加的传感器。
技术实现要素:
15.本发明的任务在于,提供一种用于对通过电驱动器驱动的车轮进行滑移调节的方法和设备,其能够在车辆的良好的可控性方面实现车辆的可靠的稳定。
16.该任务通过根据独立权利要求的方法和设备来解决。从属权利要求描述了优选的扩展方案。此外,设置有一种具有根据本发明的设备的车辆。
17.根据本发明的用于滑移调节的设备尤其用于执行根据本发明的方法;根据本发明的用于滑移调节的方法尤其可以利用根据本发明的设备来执行。
18.因此,根据本发明,通过作用在各自的车轮上的电驱动器,在力矩控制步骤中执行力矩控制,并且调配实际驱动力矩或力,其可以起到加速和制动作用。在此,获知各自的车轮的车轮滑移,并且检验是否存在不稳定。在确定了车轮不稳定时,有利地执行将车轮滑移调节到车轮的额定滑移的滑移调节,或者执行由电驱动器实现的到该额定滑移的转速调节,因为这种滑移调节或转速调节尤其一方面能够实现纵向力、尤其是导致减速的纵向力的高的传输,并且此外确保适当的横向力传输。
19.在此,获知从电驱动器传输到车轮的实际驱动力矩(其可以是加速的或制动的)并且利用结束标准来评估它。当满足结束标准或终止标准时,结束电驱动器的上级的转速调节或滑移调节。
20.因此,有利地力求达到不使用摩擦制动器的调节;因此,尤其也可以优先考虑能量回收。因此,电驱动器可以在施加负的实际驱动力矩时直接产生电能,并且又将其输送给车辆或存储器。
21.可以在力矩控制步骤之前设置额定驱动力矩获知步骤,在其中,尤其依赖于驾驶员输入获知额定驱动力矩,并且在力矩控制步骤中,在操控车轮的电驱动器时,可以测量施加的实际驱动力矩,并且将其设定和/或调设到额定驱动力矩。
22.因此,这能够适当地获知和设定实际-额定驱动力矩。
23.根据本发明,尽管在制动或再生制动时能够实现回收,但仍可以可靠地识别不稳定。在此,作为不稳定标准,尤其是可以将各自的车轮的获知的车轮滑移与边界滑移或滑移阈值(例如7%)进行比较。例如,以常见的方式,借助用于获知当前的转速的转速传感器,在与车轮的参考速度比较的情况下获知车轮滑移,该参考速度直接获知为轮毂在地面上的本
地的速度,或者可以从补充设置的abs或esc系统作为参考速度或abs或esc参考速度提取出。在满足不稳定标准时,因此开始电驱动器的上级的转速调节,并且因此将电驱动器的转速调设到额定滑移、例如15%。
24.可以基于一个选择标准或多个选择标准来选择额定滑移;有利地,获知纵向力的最大的或高的传输以及横向力的适当的传输。在此可以考虑补充的标准。尤其可以从车轮的纵向力和横向力传输的可用的模型,依赖于车轮滑移,必要时在考虑到另外的参数、例如倾斜角度等的情况下应用获知。
25.因此,已经实现根据本发明的以下优点,即在不稳定调节期间能够实现适当的横向力传输。因此,尤其是确保了车辆的侧向引导,从而也能够进一步实现转弯引导。与在开头提到的系统中不同地,因此优选地保持可转向性优先于缩短制动距离;在此,在不考虑横向力传输的情况下,尤其不会优先考虑纵向调节。
26.因为用于终止上级的转速调节的终止标准依赖于所获知的传输的实际驱动力矩构造,所以在终止调节时不会出现不稳定的状态。因为在不稳定调节中进行驱动器的转速调节或滑移调节,所以当前的车轮滑移不能被应用为终止标准,这是因为当前的车轮滑移由调节来设定。因此,终止标准优选依赖于所传输的实际驱动力矩来选择。在此识别到通过实际驱动力矩与额定驱动力矩的比较可以确保的是,在上级的转速调节结束时不仅不存在不稳定的情况,而且当前的滑移值确保足够的稳定。
27.因此,根据本发明,纵向滑移被限制在最大值,并且横向力和转向能力至少在一些情况下被考虑优先于制动力,在这些情况中该优先是有利的。
28.有利地,用于评估不稳定的边界滑移低于要调设的额定滑移,从而及时开始上级的转速调节。
29.根据本发明,因此可以沿两个方向调设实际驱动力矩。因此,一方面可以在制动过程期间进行抱死调节,并且此外可以进行驱动滑移调节。因此,滑移值和实际驱动力矩与各自的边界值或比较值的比较尤其基于这些值的绝对值、即没有符号地执行。
30.根据一种构造方案,可以设置多于一个的边界滑移。因此,在识别到不稳定时,首先在超过车轮滑移的下边界滑移时,可以转换到车轮的转速调节,并且在超过上边界滑移时转换到车轮的滑移调节,其中,车轮滑移被调节为额定滑移,即尤其是作为上级的滑移调节步骤。由此,能够实现从驱动力矩的力矩控制或力矩调节到滑移调节的改进的转换,即尤其是还具有设置在它们之间的车轮的转速调节,其中,转速调节因此也表示车轮的车轮速度调节。
31.在满足终止标准时,该方法尤其可以被重置,即再次根据实际驱动力矩控制或下级的实际驱动力矩调节来执行操控车轮的电驱动器的步骤。
32.当前传输的或输入的实际驱动力矩尤其可以通过测量由操控电路馈入的马达电流来实现;在此,通常可以有利地设置的是,例如通过整流器提供的马达电流与馈入的或传输的实际驱动力矩成正比。因此,可以以小的耗费获知传输的实际驱动力矩,其中,为此所需的值通常已经可供系统使用。
33.根据本发明的方法和根据本发明的设备的主要的优点在于,因此即使在没有补充的传感器、例如偏航率传感器或横向加速度传感器的情况下也可以确保横向力引导。可以基于例如用于纵向力引导和侧向力引导的模型设置用于上级的转速调节的合适的额定滑
移,其能够以高的精度实现合适的纵向力引导和横向力引导。
34.其次,可以设置摩擦制动器的使用,其中,例如仅在识别到需要干预时设置摩擦制动器,例如用于实施相应的高的制动力矩。否则,通过根据本发明的方法在操控电驱动器的情况下可以主要进行防抱死调节或abs调节。
35.电驱动器尤其可以是轮毂马达,其由此能够车轮专属地实现调配合适的实际驱动力矩。原则上,电驱动器可以设置有传动装置或没有传动装置。
36.代替abs的车轮转速传感器地,也可以使用电机的转速、即可用的编码器信号。如果电机通过传动装置作用在车轮上,则各自的传动比可以被应用于计算车轮转速。
37.根据本发明的扩展方案,在转速调节时初始设定额定滑移之后,额定滑移值可以在该目标值周围以例如递增的步长改变。因此,在电驱动器的转速调节下级的转矩调节或转矩设定可以测量电驱动器的由此产生的转矩变化。因此,例如可以朝例如更高的传输的额定力矩或车轮力的方向增加地改变最初设置的并且被评估为最佳的额定滑移(例如15%)。在此有利地,可以例如利用22%的上边界滑移(车轮滑移边界值)来设置用于限制这种变化的不能够被超过的滑移上边界。
附图说明
38.下面根据一些实施方式的任意的附图更详细地阐述本发明。其中:
39.图1示出了具有根据本发明的实施方式的设备或驱动控制的车辆;
40.图2示出了具有根据另外的实施方式的设备的车辆;
41.图3示出了在不同的行驶情况下的轮胎纵向力和轮胎横向力根据车轮滑移的图示;
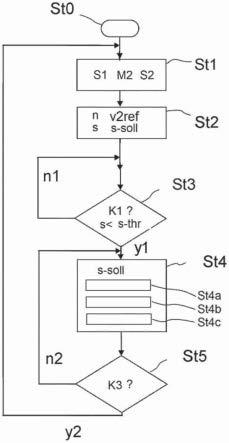
42.图4示出了根据本发明的方法的流程图。
具体实施方式
43.根据图1,车辆1具有四个车轮2,车轮分别通过电动轮毂马达3驱动。原则上,各自的车轮2可以如所示的那样直接通过马达操控,或者也可以间接通过传动装置,由马达操控。各个车轮2的车轮转速分别通过主动或被动的车轮转速传感器4测量,该车轮转速传感器输出转速信号n。根据图1的原则上简化的图示,设置有驱动器控制装置6,其通过驱动器控制信号s1操控各个轮毂马达3。轮毂马达3一方面能够驱动各个车轮2,并且此外能够实现回收、即收回在车轮制动时的动能。
44.轮毂马达3的操控装置3a获知实际输出的实际驱动力矩m2;因此例如可以设置的是,输送给轮毂马达3的电流强度i3与施加的实际驱动力矩m2成正比。因此,每个操控装置3a向中央驱动器控制装置6发送关于施加在各自的车轮2上的实际驱动力矩m2的信息信号s2。如果实际驱动力矩m2用于加速车轮2,那么实际驱动力矩在此是正的,并且如果实际驱动力矩用于制动车轮2(尤其是通过回收),那么其是负的。
45.由车轮2沿车辆的纵向方向传输的轮胎纵向力fl和沿轮胎2的横向方向传输的轮胎横向力fq依赖于各自的车轮滑移s以及例如侧偏角度α。车轮滑移s又尤其依赖于道路或地面的摩擦值μ。图3示出了相应的模型形成,据此,根据车轮滑移s示出两个力fl和fq,并且曲线随侧偏角度α而变化。
46.在此,车轮滑移s可以获知为车轮速度、即车轮圆周速度v2相对于车辆速度v1的
比,因为在没有车轮滑移的纯静摩擦的情况下,车轮速度(车轮圆周速度)v2与在直线行驶时的车辆速度v1相一致。
47.根据图3,在传输轮胎纵向力fl时,总是会出现一定的车轮滑移s,从而fl的曲线最初随着车轮滑移的增大而升高,并且必要时依赖于侧偏角度α随后随着车轮滑移s的值的增大而降低,其中,在更大的车轮滑移的情况下,相应尤其也可以出现车轮2的抱死。相反,轮胎横向力fq随着车轮滑移s的增大而减小。
48.上述的设计原则上既适用于制动过程,也适用于加速过程,其中,在制动过程中可能发生被制动的车轮的抱死,而在驱动过程中可能出现车轮的打滑。
49.根据本发明力求达到的是,通过驱动器(即在此是轮毂马达3)在一个区域内调设车轮2,在该区域中可以施加轮胎纵向力fl和充分的轮胎横向力fq,以便因此实现车辆1的适当的转弯引导或横向引导。
50.在行驶期间,驱动器控制装置6基于各自的车轮转速信号n和车辆1的参考速度v1-ref或车轮的参考速度v2ref(它们原则上从一个模型形成中计算出)检验各个车轮2的车轮滑移s,如在防抱死系统(abs)中常见的那样。
51.不稳定例如可以通过车轮滑移s与至少一个滑移阈值s-thr的比较来实现,即利用不稳定标准k1:s》s-thr,例如s-thr=7%或s-thr=0.07,来实现。
52.在根据不稳定标准k1识别到不稳定时,进行将轮毂马达3调节到额定滑移值s-soll、例如s-soll=0.15(15%)的转速调节,其中,在此有利地,可以设置在滑移调节的起始值(即例如具有滑移阈值的识别的值、例如s-thr=7%)与要调设的额定值、例如s-soll=0.15(15%)之间的转换。滑移额定值s-soll的精确的值在此可以根据图3、根据行驶情况来选择;在此,尤其可以考虑所需的轮胎横向力fq。因此,根据各自的行驶情况在维持用于横向力传输的潜力的情况下能够实现例如导致减速的纵向力或轮胎纵向力fl的最大的或高的传输。为此,驱动器控制装置6尤其还可以应用关于转弯行驶的信息、例如偏航率ω或必要时由相应的传感器直接获知的横向加速度aq。此外,可以相应考虑各自的侧偏角度α,从而形成额定滑移s-soll的选择标准k2。
53.因此,通过操控轮毂马达3实现将车轮滑移s调节到额定滑移s-soll的转速调节,其方法是,因此轮毂马达被操控以加速或减速车轮2。通过测量驱动电流(操控电流)i3,相应地在此获知调配的实际驱动力矩m2。
54.根据图2,图1所示的结构也可以相应借助驱动器控制装置6和中央制动控制装置10实现,其直接或在ebs中尤其也间接通过制动控制信号s3操控相应的用于制动各个车轮2的车轮制动器9、例如气动车轮制动器。为了操控尤其可以使用电动气动阀装置,其例如具有中继阀和abs阀,从而各自的车轮制动器9随后将制动力fb传输到各个车轮2。在这样的结构中,车轮转速传感器4因此以常见的方式将车轮转速信号n输出到制动控制装置10,该制动控制装置与中央驱动器控制装置6处于数据连接或者与之集成。
55.如果例如需要借助构造为摩擦制动器的车轮制动器9对车轮2进行更强的减速,那么制动控制装置10因此也可以相应装入到调节中。否则,根据本发明的调节有利地仅通过操控驱动器(即在此是轮毂马达3)来进行。
56.因此,根据图4的流程图,在步骤st0中的启动之后,在步骤st1中,通过回收来设定或调节各自的车轮2上的实际驱动力矩m2。
57.在步骤st1期间和/或之后,根据步骤st2还设置的是,确定车轮转速n、车轮滑移s和参考速度v2ref,并且规定或调用额定滑移s-soll。根据步骤st3,连续检验:是否满足不稳定标准k1。在存在相应的不稳定时,根据分支y1,在步骤st4中执行转速调节,以便将车轮滑移s调节到额定滑移s-soll。
58.在此,根据步骤st4连续检验:传输的实际驱动力矩m2或传输的力是否满足用于结束滑移调节方法的终止标准k3。
59.相应地,作为终止标准k3不再能够根据标准k1来评估车轮滑移,因为该车轮滑移刚好作为调节参量被调设到滑移额定值s-soll。因此,通过传输的实际驱动力矩m2来评估终止标准k3。
60.终止标准k3有利地依赖于下级的驱动力矩调节或控制,以便因此评估:是否存在稳定的情况,并且上级的滑移调节是否已经不会引起相关的变化。
61.因此,终止标准尤其可以评估:所要求的额定力矩是否低于所传输的实际驱动力矩m2,即m2《x*m-soll。
62.其中,尤其地,也可以设置x=1,
63.即m2《m-soll。
64.如果是这种情况,那么因此识别出稳定的情况,并且根据分支y2结束滑移调节,即根据图3的图示又回到下级的力矩调节,或者如在此示出的那样,根据步骤st1回到实际驱动力矩m2的调节。
65.根据另外的优选的构造,在步骤st4中的滑移调节中,车轮滑移s可以在步骤st4a中,在目标值、即滑移额定值s-soll周围以递增的步长改变。在轮毂马达3的转速调节下级的转矩调节可以在步骤st4b中测量轮毂马达3的由此产生的转矩变化。例如15%的最佳的滑移点然后在步骤st4c中,沿更高的传输的转矩m2或车轮力的方向自适应地改变。在此可以设置的是,不超过滑移上边界s-up,其中例如s-up=22%,从而将车轮滑移s限制在22%,这因此表示适应终止标准k5。
66.在根据图2的构造中,驱动调节可以与abs调节组合。因此,电减速或回收可以与具有恒定的力矩的下级的摩擦制动上级。因此,在车轮2的抱死倾向中,可以经由车轮制动器9,借助经由中央制动控制装置10(abs调节装置)实现的abs调节方法,在轮毂马达3的同时的作用的情况下(尤其是在回收时)调节摩擦制动。
67.根据另外的实施方式,可以通过滑移速度的恒定分量来获知最佳的滑移速度。
68.额定滑移s-soll可以由行驶动态系统预设。因此,额定滑移s-soll可以依赖于横向力需求被修改,并且当需要相应的侧向引导力时受到更严格的限制。侧向引导力可以从esc车辆运动模型中提取出。
69.此外,根据实施方式,代替所示的车轮转速传感器4地,可以使用轮毂马达3的转速、即例如编码器信号。如果电驱动器3通过传动装置输入到车轮2,那么将各自的传动比应用于计算车轮转速n。
70.附图标记列表
[0071]1ꢀꢀꢀ
车辆
[0072]2ꢀꢀꢀꢀꢀꢀꢀ
车轮
[0073]3ꢀꢀꢀꢀꢀꢀꢀ
轮毂马达
[0074]
3a
ꢀꢀꢀꢀꢀꢀ
轮毂马达3的操控装置
[0075]4ꢀꢀꢀꢀꢀꢀꢀ
车轮转速传感器
[0076]6ꢀꢀꢀꢀꢀꢀꢀ
驱动器控制装置
[0077]9ꢀꢀꢀꢀꢀꢀꢀ
车轮制动器、尤其是气动车轮制动器
[0078]
10
ꢀꢀꢀꢀꢀꢀ
制动控制装置
[0079]
11
ꢀꢀꢀꢀꢀꢀ
电动气动ebs制动系统,具有:
[0080]
ꢀꢀꢀꢀꢀꢀꢀꢀ
中央制动控制装置10、气动车轮制动器9和通过制动控制
[0081]
ꢀꢀꢀꢀꢀꢀꢀꢀ
信号s3操控的电动气动阀
[0082]
12
ꢀꢀꢀꢀ
由具有操控装置3a的轮毂马达3和驱动器控制装置6构
[0083]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
成的设备
[0084]
fl
ꢀꢀꢀꢀꢀꢀꢀ
轮胎纵向力
[0085]
fq
ꢀꢀꢀꢀꢀꢀꢀ
轮胎横向力
[0086]
s1
ꢀꢀꢀꢀꢀꢀꢀ
驱动器控制信号
[0087]
s2
ꢀꢀꢀꢀꢀꢀꢀ
马达力矩信息信号
[0088]
s3
ꢀꢀꢀꢀꢀꢀꢀ
制动控制信号
[0089]nꢀꢀꢀꢀꢀꢀꢀꢀ
车轮转速信号
[0090]sꢀꢀꢀꢀꢀꢀꢀꢀ
车轮滑移
[0091]
s-soll
ꢀꢀꢀ
额定车轮滑移
[0092]
s-thr
ꢀꢀꢀꢀ
用于评估不稳定的边界滑移
[0093]
s-thr-lo 下边界滑移
[0094]
s-thr-up 上边界滑移
[0095]
s-up
ꢀꢀꢀꢀꢀ
上滑移值
[0096]
k1
ꢀꢀꢀꢀꢀꢀꢀ
不稳定标准
[0097]
k2
ꢀꢀꢀꢀꢀꢀꢀ
用于获知滑移额定值s-soll的选择标准
[0098]
k3
ꢀꢀꢀꢀꢀꢀꢀ
终止标准
[0099]
v1
ꢀꢀꢀꢀꢀꢀꢀ
车速
[0100]
v1-ref
ꢀꢀꢀ
车辆参考速度
[0101]
v2-soll
ꢀꢀ
车轮2的额定速度
[0102]
v2
ꢀꢀꢀꢀꢀꢀꢀ
车轮速度
[0103]
v2ref
ꢀꢀꢀꢀ
车轮参考速度
[0104]
ω
ꢀꢀꢀꢀꢀꢀꢀꢀ
偏航率
[0105]
aq
ꢀꢀꢀꢀꢀꢀꢀ
横向加速度
[0106]
m2
ꢀꢀꢀꢀꢀꢀꢀ
实际驱动力矩、传输的实际驱动力矩
[0107]
m-soll
ꢀꢀꢀ
额定驱动力矩
[0108]
slc
ꢀꢀꢀꢀꢀꢀ
滑移调节(滑移环控制)
[0109]
nlc
ꢀꢀꢀꢀꢀꢀ
车轮2的转速调节
[0110]
tc
ꢀꢀꢀꢀꢀꢀꢀ
作为控制和/或调节的力矩控制、驱动力矩m的控制
[0111]
vlc
ꢀꢀꢀꢀꢀꢀ
行驶动态调节
[0112]
st0至st5
ꢀꢀ
方法的步骤
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
