技术特征:
1.用于对通过电驱动器(3)驱动的车轮(2)进行滑移调节的方法,所述方法至少具有以下步骤:-在力矩控制步骤(st1)中,在力矩控制(tc)中,以实际驱动力矩(m2)操控所述车轮(2)的电驱动器(3),-获知所述车轮(2)的车轮转速(n)和车轮滑移(s),并且通过不稳定标准(k1)评估所述车轮滑移(s)以得知是否存在不稳定(st3),-在识别到不稳定时,通过操控所述电驱动器(3)直接或间接转换为将所述车轮滑移(s)调节到额定滑移(s-soll)的滑移调节(slc)(st4,上级的滑移调节步骤),-获知是否满足用于结束所述滑移调节的终止标准(k3)(st5),-如果满足所述终止标准(k3),那么返回所述力矩控制步骤(st1)中的力矩控制(tc)。2.根据权利要求1所述的方法,其特征在于,-在所述力矩控制步骤(st1)之前设置额定驱动力矩获知步骤(st0-1),在其中,尤其是依赖于驾驶员输入获知额定驱动力矩(m-soll),并且-在所述力矩控制步骤(st1)中,在操控所述车轮(2)的电驱动器(3)时,测量施加的实际驱动力矩(m2),并且将施加的实际驱动力矩设定和/或调设到所述额定驱动力矩(m-soll)。3.根据权利要求1或2所述的方法,其特征在于,所述力矩控制(tc)设置为用于将所述车轮(2)加速和/或减速,例如加速和/或减速到额定速度(v2-soll)的下级的驱动力矩调节。4.根据前述权利要求中任一项所述的方法,其特征在于,在所述滑移调节(slc)期间,至少暂时设置通过所述电驱动器(3)在回收时实现的车轮(2)的减速。5.根据前述权利要求中任一项所述的方法,其特征在于,由所述电驱动器(3)施加到所述车轮(2)上的实际驱动力矩(m2)通过测量输入到所述电驱动器(3)中的马达电流(i3)来获知。6.根据前述权利要求中任一项所述的方法,其特征在于,作为电驱动器(3)设置有轮毂马达(3),所述轮毂马达加速所述车轮(2),和/或在回收时减速所述车轮(2)。7.根据前述权利要求中任一项所述的方法,其特征在于,多个车轮(2)分别通过电驱动器(3)来进行滑移调节,其中,所述电驱动器(3)通过中央驱动器控制装置(6)来操控,所述中央驱动器控制装置输出用于设定额定驱动力矩(m2-soll)的驱动器控制信号(s1),并且接收关于调配到所述车轮(2)上的实际驱动力矩(m2)的马达力矩信息信号(s2)。8.根据前述权利要求中任一项所述的方法,其特征在于,从一方面的获知的车轮转速(n)或轮毂马达(3)的驱动器转速(n3)和另一方面的车轮参考速度(v2ref)或车辆参考速度(v1-ref)获知所述车轮(2)的车轮滑移(s)。9.根据前述权利要求中任一项所述的方法,其特征在于,基于力-滑移模型(图3),在考虑到要传输的车轮横向力(fq)的情况下选择所述额定滑移(s-soll)。10.根据前述权利要求中任一项所述的方法,其特征在于,基于选择标准(k2),尤其是在应用所述车轮(2)的当前的或预期的横向力(fq)和/或侧偏角度(α)的情况下,获知所述
滑移调节的额定滑移(s-soll)。11.根据前述权利要求中任一项所述的方法,其特征在于,由行驶动态调节(vlc)获知并且预设所述额定滑移(s-soll)。12.根据前述权利要求中任一项所述的方法,其特征在于,在所述不稳定标准(k1)中,比较所述车轮(2)的车轮滑移(s)与至少一个边界滑移(s-thr),并且在超过边界滑移(s-thr)的情况下识别到不稳定。13.根据权利要求12所述的方法,其特征在于,所述边界滑移(s-thr)小于所述额定滑移(s-soll),例如其中,边界滑移(s-thr)等于7%,并且额定滑移(s-soll)等于15%。14.根据权利要求12或13所述的方法,其特征在于,在识别到不稳定时,在超过所述车轮滑移(s)的下边界滑移(s-thr-lo)时,首先转换到所述车轮(2)的转速调节(nlc),并且在超过上边界滑移(s-thr-lo)时转换到所述车轮(2)的滑移调节(slc),其中,将所述车轮滑移(s)调节到所述额定滑移(s-soll),(st4,上级的滑移调节步骤)。15.根据前述权利要求中任一项所述的方法,其特征在于,作为终止标准(k3),评估在所述滑移调节(slc)期间传输的实际驱动力矩(m2)。16.根据权利要求15所述的方法,其特征在于,比较所述实际驱动力矩(m2)与在下级的转矩控制(st1)中预设的额定驱动力矩(m-soll)(m2<m-soll),其中,在传输的实际驱动力矩(m2)低于在下级的力矩控制(tc)中预设的额定驱动力矩(m-soll)的情况下,满足所述终止标准(k3)(st5)。17.根据前述权利要求中任一项所述的方法,其特征在于,在所述滑移调节(st4)中,调整所述额定滑移(s-soll),其方式是:-在所述额定滑移(s-soll)的初始设定之后,随后通过以递增的步长(δs)进行偏移来规定当前的额定滑移(s-soll-ink),并且-获知由所述电驱动器(3)传输的驱动力矩(m2)的在此产生的变化,-其中,在确定传输的驱动力矩(m2)增大时,将当前的额定滑移(s-soll-ink)规定为新的额定滑移(s-soll)。18.根据权利要求17所述的方法,其特征在于,依赖于另外的适应终止标准(k5),例如在达到例如22%的滑移上边界(s-up)时,结束或限制所述额定滑移(s-soll)的调整。19.根据前述权利要求中任一项所述的方法,其特征在于,还同时设置使用车轮制动器、尤其是摩擦制动器(9)。20.根据前述权利要求中任一项所述的方法,其特征在于,通过车轮转速传感器(4)获知车轮转速信号(n),和/或获知电机、例如轮毂马达(3)的马达转速(n3)。21.用于对车轮(2)进行滑移调节的设备(12),所述设备具有:电驱动器(3),所述电驱动器用于将加速的和减速的实际驱动力矩(m2)传输到所述车轮(2)上,设置为所述电驱动器(3)的一部分的或附加设置的操控装置(3a),所述操控装置用于给所述电驱动器(3)通电,中央驱动器控制装置(6),所述中央驱动器控制装置用于通过驱动器控制信号(s1)对所述操控装置(3a)进行操控,并且用于接收关于由所述操控装置(3a)当前调配的实际驱动
力矩(m2)的马达力矩信息信号(s2),其中,所述中央驱动器控制装置(6)被设计或设立成用于执行根据前述权利要求中任一项所述的方法。22.车辆,所述车辆具有根据权利要求21所述的设备(12)和至少一个通过所述设备(12)操控的车轮(2)。
技术总结
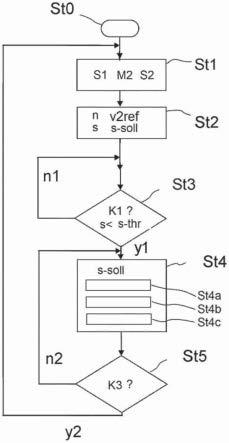
本发明涉及用于对通过电驱动器驱动的车轮进行滑移调节的方法,其至少具有以下步骤:-在力矩控制步骤(St1)中,在力矩控制中,以实际驱动力矩(M2)操控车轮的电驱动器,-获知车轮的车轮转速(n)和车轮滑移(s),并且通过不稳定标准(K1)评估车轮滑移(s)以得知是否存在不稳定(St3),-在识别到不稳定时,通过操控电驱动器直接或间接转换为将车轮滑移(s)调节到额定滑移(s-soll)的滑移调节(St4,上级的滑移调节步骤),-获知是否满足用于结束滑移调节的终止标准(K3)(St5),-如果满足终止标准(K3),那么返回力矩控制步骤(St1)中的力矩控制。返回力矩控制步骤(St1)中的力矩控制。返回力矩控制步骤(St1)中的力矩控制。
技术研发人员:乌韦
受保护的技术使用者:采埃孚商用车系统全球有限公司
技术研发日:2020.12.01
技术公布日:2022/7/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。