1.所公开的发明涉及一种通过将马达与安装在车辆车轮上的卡钳一体化来操作的马达一体式卡钳(motor-on-caliper,moc)型的电子驻车制动系统及其控制方法。
背景技术:
2.一般来说,电子驻车制动(electric parking brake,epb)系统,特别是由马达驱动的卡钳式moc型epb系统通过减速机增加由电动马达产生的扭矩,从而可以通过卡钳内部的机械结构装置产生驻车所需的夹紧力(clamping force)。
3.moc型epb系统通过驱动电动马达按压活塞,以利用制动垫按压与车轮一体旋转的制动盘,从而可以通过制动垫与制动盘的接触面之间的摩擦力产生夹紧力。
4.传统的epb系统以车辆的最大重量为基准控制夹紧力。
5.然而,在实际驾驶条件下,以最大重量行驶或运行的条件并不经常发生。因此,每个部件必然会被过度设计,从而存在制造成本增加的问题。
技术实现要素:
6.(一)要解决的技术问题
7.所公开的发明的一个方面,旨在提供一种可以在防止过度设计的同时预测车辆实际重量以产生驻车所需夹紧力的电子驻车制动系统及其控制方法。
8.(二)技术方案
9.所公开发明的一个方面,可以提供一种电子驻车制动系统,包括:电子驻车制动器,设置为在车辆的车轮上产生夹紧力;以及控制部,在所述车辆的行车制动时,根据所述车辆的车轮压力和纵向加速度估算所述车辆的重量,并在驻车操作时,根据估算的所述车辆的重量确定驻车所需的夹紧力,并操作所述电子驻车制动器以产生确定的所述夹紧力。
10.估算的所述车辆重量越重,所述控制部可以将驻车所需的夹紧力确定为越高的值。
11.从所述车辆的行车制动时到所述驻车操作开始之前,所述控制部可以根据所述车辆的车轮压力和纵向加速度反复估算所述车辆的重量,并将估算的所述车辆的重量中最高的值估算为车辆的重量。
12.从所述车辆的行车制动时到所述驻车操作开始之前,所述控制部可以根据所述车辆的车轮压力和纵向加速度反复估算所述车辆的重量,并累计估算的所述车辆的重量,将累计值的平均值估算为车辆的重量。
13.在驻车操作之后解除驻车操作时,所述控制部可以将对估算的所述车辆的重量增加或减去预设值的重量估算为车辆的重量。
14.电子驻车制动系统可以包括:通信接口,与安装在所述车辆上的系统进行通信,以接收所述车辆的车轮压力和纵向加速度,并且在所述车辆的行车制动时,所述控制部可以通过所述通信接口接收所述车辆的车轮压力和纵向加速度,并根据接收的所述车辆的所述
车轮压力和所述纵向加速度估算所述车辆的重量。
15.所公开发明的另一方面,可以提供一种包括由电动马达操作的马达致动器的电子驻车制动系统,所述电子驻车制动系统包括:马达驱动电路,驱动所述电动马达;电流传感器,检测流过所述电动马达的电流;通信接口,与安装在所述车辆上的系统进行通信,以接收所述车辆的车轮压力和纵向加速度;以及控制部,在所述车辆的行车制动时,从所述通信接口接收所述车辆的车轮压力和纵向加速度,根据接收的所述车辆的所述车轮压力和所述纵向加速度估算所述车辆的重量,并在驻车操作时,根据估算的所述车辆的重量改变目标电流,并通过所述马达驱动电路驱动所述电动马达,以使由所述电流传感器检测的马达电流达到改变的所述目标电流。
16.估算的所述车辆的重量越重,所述控制部可以将所述目标电流变更为越高的值。
17.所述控制部可以根据估算的所述车辆的重量来确定驻车所需的夹紧力,并根据确定的所述夹紧力改变所述目标电流。
18.从所述车辆的行车制动时到所述驻车操作开始之前,所述控制部可以根据所述车辆的车轮压力和纵向加速度反复估算所述车辆的重量,并将估算的所述车辆的重量中最高的值估算为车辆的重量。
19.所公开发明的又一方面,可以提供一种包括设置为在车辆的车轮上产生夹紧力的电子驻车制动器的电子驻车制动系统的控制方法,所述方法包括以下步骤:在所述车辆的行车制动时,根据所述车辆的车轮压力和纵向加速度估算所述车辆的重量;在驻车操作时,根据估算的所述车辆的重量来确定驻车所需的夹紧力;以及操作所述电子驻车制动器以产生确定的所述夹紧力。
20.估算所述车辆的重量可以包括:在所述车辆的行车制动时,检测所述车辆的车轮压力和纵向加速度,并根据检测的所述车轮压力和所述纵向加速度估算所述车辆的重量。
21.估算所述车辆的重量可以包括:在所述车辆的行车制动时,通过通信接口接收所述车辆的车轮压力和纵向加速度,并根据接收的所述车辆的所述车轮压力和所述纵向加速度估算所述车辆的重量。
22.估算所述车辆的重量可以包括:从所述车辆的行车制动时到所述驻车操作开始之前,根据所述车辆的车轮压力和纵向加速度反复估算所述车辆的重量,并将估算的所述车辆的重量中最高的值估算为车辆的重量。
23.确定所述夹紧力可以包括:估算的所述车辆的重量越重,将驻车所需的夹紧力确定为越高的值。
24.(三)有益效果
25.根据所公开的发明的一个方面,可以在防止过度设计的同时预测车辆实际重量以产生驻车所需的夹紧力。
附图说明
26.图1示出应用根据一个实施例的电子驻车制动系统的车辆。
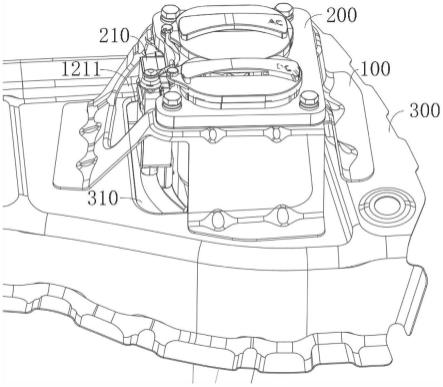
27.图2示出应用于根据一个实施例的电子驻车制动系统的电子驻车制动器(epb)的结构。
28.图3示出根据一个实施例的电子驻车制动系统的控制块。
29.图4示出在根据一个实施例的电子驻车制动系统中估算车辆重量。
30.图5示出在根据一个实施例的电子驻车制动系统中在车辆行车制动时估算车辆重量的结果。
31.图6示出在根据一个实施例的电子驻车制动系统中估算的每个车辆重量的夹紧力。
32.图7示出根据一个实施例的电子驻车制动系统的控制方法。
33.图8示出根据另一个实施例的电子驻车制动系统的控制方法。
34.图9示出根据又一个实施例的电子驻车制动系统的控制方法。
具体实施方式
35.在整个说明书中,相同的附图标记指代相同的组件。本说明书并未说明实施例的所有组件,将省略在所公开的发明所属技术领域中的一般内容或实施例之间重复的内容。说明书中使用的“部、模块、部件、块”等术语可以通过软件或硬件来实现,并且根据实施例,多个“部、模块、部件、块”可以通过一个组件来实现,或者一个“部、模块、部件、块”也可以包括多个组件。
36.在整个说明书中,当描述某个部分与另一部分“连接”时,其不仅包括直接连接的情况,还包括间接连接的情况,并且间接连接包括通过无线通信网连接。
37.另外,当描述某个部分“包括”某个组件时,除非另有明确相反的记载,否则这意味着可以进一步包括其他组件,而不是排除其他组件。
38.在整个说明书中,当描述某个部件位于另一部件“上”时,其不仅包括某个部件与另一部件接触的情况,还包括两个部件之间存在又一部件的情况。
39.第一、第二等术语仅用于区分一个组件与另一组件,所述组件并不受所述术语的限制。除非上下文中有明确说明,否则单数包括复数。
40.在每个步骤中,标识符号用于方便说明,标识符号并不是描述每个步骤的顺序,除非上下文中有明确记载特定顺序,否则每个步骤的执行顺序可以与所记载的顺序不同。
41.图1示出应用根据一个实施例的电子驻车制动系统的车辆。
42.参照图1,车辆可以包括电子制动系统10、驾驶员辅助系统20以及电子驻车制动系统30。
43.电子制动系统10可以响应于驾驶员通过制动踏板的制动意志和/或车轮的打滑(slip)来控制制动装置。
44.电子制动系统10可以是响应于车辆制动时检测到的车轮的打滑而能够暂时解除车轮制动的防抱死制动系统(anti-lock brucking system,abs)。另外,电子制动系统10可以是响应于车辆转向时检测到的转向过度(oversteering)和/或转向不足(understeering)而能够选择性地解除车轮制动的电子稳定控制系统(electronic stability control,esc)。另外,电子制动系统10可以是响应于车辆驱动时检测到的车轮的打滑而能够暂时制动车轮的牵引力控制系统(traction control system,tcs)。
45.当车辆停车后出发时,如果在车辆的前方检测区域和后方检测区域中的根据档位状态的检测区域中存在行人和/或障碍物,则驾驶员辅助系统20可以根据驾驶员的加速意志来判断是否需要紧急制动,并根据判断结果来警告驾驶员或执行车辆1的紧急制动。具体
地,当检测区域中存在行人和/或障碍物时,驾驶员辅助系统20可以从通过加速踏板传感器检测到的加速踏板位置识别出加速踏板的变化量,并根据识别的加速踏板变化量来判断是否需要执行车辆的紧急制动,并且当需要紧急制动时,可以紧急制动车辆。
46.驾驶员辅助系统20可以通过前方防撞系统(forward collision avoidance,fca)、紧急制动系统(autonomous emergency brake,aeb)、车道偏离警告(lane departure warning,ldw)、车道保持辅助(lane keeping assist,lka)、驻车转向辅助系统(smart parking assist system,spas)、驾驶员注意警告系统(driver attention warning,daw)、智能巡航控制系统(smart cruise control,scc)以及盲点检测系统(blind spot detection,bsd)等来实现。
47.电子驻车制动系统30可以通过车辆用通信网络(nt)与电子制动系统10和驾驶员辅助系统20彼此通信。例如,系统可以通过以太网(ethernet)、媒体导向系统传输(media oriented systems transport,most)、flexray、控制器区域网络(controller area network,can)、局域互联网络(local interconnect network,lin)等进行数据交换。
48.图2示出应用于根据一个实施例的电子驻车制动系统的电子驻车制动器(epb)的结构。
49.参照图2,电子驻车制动器100可以包括:支架110,一对垫板111、112可前后移动地安装在所述支架110,以按压与车轮一起旋转的制动盘d;卡钳壳体120,可滑动地安装在支架110上,并设置有缸体123,活塞121通过制动液压可前后移动地安装在所述缸体123;动力转换单元130,用于按压活塞121;以及马达致动器140,使用马达m向动力转换单元130传递旋转力。
50.一对垫板111、112被区分为设置为与活塞121接触的内侧垫板111和设置为与卡钳壳体120的指状部122接触的外侧垫板112。这样的一对垫板111、112安装在固定到车身的支架110上,以能够朝向制动盘d的两侧侧面前后移动。另外,在面向制动盘d的各垫板111、112的一面附接有制动垫113。
51.卡钳壳体120可滑动地安装在支架110上。更具体地,卡钳壳体120包括:缸体123,在其后部安装有动力转换单元130,并且活塞121可前后移动地内置在缸体123中;以及指状部122,向下弯曲地形成在前部以操作外侧垫112。指状部122与缸体123形成为一体。
52.活塞121被设置为内部以杯(cup)状凹陷的圆筒状,并且可滑动地插入到缸体123内。所述活塞121通过接收到马达致动器140的旋转力的动力转换单元130的轴力,向制动盘d侧按压内侧垫板111。因此,当施加动力转换单元130的轴力时,活塞121向内侧垫板111侧前进,以按压内侧垫板111,并且卡钳壳体120通过反作用力向与活塞121相反的方向操作,以使指状部122向制动盘d侧按压外侧垫板112,由此可以执行制动。
53.动力转换单元130可以起到接收来自马达致动器140的旋转力,并向内侧垫板111侧按压活塞121的作用。
54.动力转换单元130可以包括:螺母部件131,安装并配置在活塞121内,并与活塞121接触;以及主轴部件135,与所述螺母部件131螺纹结合。
55.螺母部件131可以以旋转被限制的状态设置在在活塞121内,并与主轴部件135螺纹结合。
56.螺母部件131可以包括:头部132,被设置为与活塞121接触;结合部133,从所述头
部132延伸形成,并且在内周面上形成内螺纹以与主轴部件135螺纹结合。
57.螺母部件131根据主轴部件135的旋转方向向前或向后移动,并且可以起到对活塞121进行按压和解除按压的作用。此时,向前移动可以是螺母部件131接近活塞121的移动方向。向后移动可以是螺母部件131远离活塞121的移动方向。此外,向前移动可以是活塞121接近制动垫113的移动方向。向后移动可以是活塞121远离制动垫113的移动方向。
58.主轴部件135可以包括:轴部136,贯穿卡钳壳体120的后部,并接收马达致动器140的旋转力进行旋转;以及法兰部137,从所述轴部136径向延伸形成。轴部136的一侧贯穿缸体123的后部并可旋转地设置,并且其另一侧可以安装在活塞121内。此时,贯穿缸体123的轴部136的一侧与减速机142的输出轴连接,并接收马达致动器140的旋转力。
59.马达致动器140可以包括电动马达141和减速机142。
60.电动马达141通过旋转主轴部件135使螺母部件131前后移动,由此可以对活塞121进行按压或解除按压。
61.减速机142可以设置在电动马达141的输出侧与主轴部件135之间。
62.通过具有上述结构,电子驻车制动器在驻车操作模式时,通过使用马达致动器140使主轴部件135向一个方向旋转,由此可以移动螺母部件131以按压活塞121。通过螺母部件131的移动而被按压的活塞121按压内侧垫板111,从而将制动垫113紧贴到制动盘d,由此可以产生夹紧力。
63.另外,电子驻车制动器在驻车解除模式时,通过使用马达致动器140使主轴部件135向反方向旋转,由此可以使按压活塞121的螺母部件131向后移动。通过螺母部件131的向后移动可以解除对活塞121的按压。通过解除对活塞121的按压,使得制动垫113从制动盘d隔开,由此可以解除产生的夹紧力。
64.图3示出根据一个实施例的电子驻车制动系统的控制块。
65.参照图3,电子驻车制动系统30可以包括控制部200,所述控制部200执行与电子驻车制动器100的操作相关的整体控制。
66.控制部200的输入侧可以电连接电流传感器300。
67.控制部200的输入/输出侧可以电连接通信接口310。
68.控制部200的输出侧可以电连接马达驱动电路320。
69.电流传感器300可以检测流过电动马达141的电流。例如,电流传感器300可以通过使用分流电阻或霍尔传感器来检测流过电动马达141的马达电流。除了分流电阻或霍尔传感器之外,电流传感器300还可以应用能够检测马达电流的各种方式。电流传感器300可将检测到的电流信息传送到控制部200。
70.通信接口310可以通过车辆用通信网络(nt)与电子制动系统10和驾驶员辅助系统20进行通信信号的交换。通信接口310可以包括控制器区域网络收发器。
71.马达驱动电路320可以使电动马达141正向旋转或反向旋转。例如,马达驱动电路320可以包括由多个电力开关元件组成的h桥(h-bridge)电路,以使电动马达141正向和反向旋转。在通过马达驱动电路320使电动马达141向一个方向旋转的驻车操作期间,电动马达141的单向旋转经过减速机142减速,从而可以大力地向一个方向旋转主轴部件135。当主轴部件135向一个方向旋转时,可以实现螺母部件131的轴向移动。当螺母部件131按压活塞121时,两个制动垫113可以按压制动盘d以使车轮制动。驻车操作解除可以与驻车操作相反
地操作。
72.控制部200可以被称为电子控制单元(electronic control unit,ecu)。
73.控制部200可以包括处理器210和存储器220。
74.存储器220可以存储用于处理器210的处理或控制的程序以及用于电子驻车制动系统的操作的各种数据。
75.存储器220不仅可以包括静态随机存取存储器(static random access memory,s-ram)、动态随机存取存储器(dynamic random access memory,d-ram)等易失性存储器,还可以包括闪存、只读存储器(read only memory,rom)、可擦除可编程只读存储器(erasable programmable read only memory,eprom)等非易失性存储器。
76.处理器210可以控制电子驻车制动系统30的整体操作。
77.具有上述结构的控制部200可以通过马达驱动电路320使得电动马达141正向旋转或反向旋转。
78.控制部200可以通过由驾驶员操作的驻车开关的操作信号或由与电子驻车制动操作相关的程序生成的操作信号来执行驻车操作模式或驻车解除模式。
79.驻车操作模式时,控制部200向一个方向旋转电动马达141,以使螺母部件131向前移动并按压活塞121,由此将制动垫113紧贴到制动盘d,从而可以执行产生夹紧力的驻车操作(parking apply)。
80.驻车解除模式时,控制部200向反方向旋转电动马达141,以使螺母部件131向后移动并解除按压活塞121,由此对紧贴到制动盘d的制动垫113解除紧贴,从而可以执行解除产生的夹紧力的驻车操作解除(parking release)。
81.控制部200可以通过通信接口310向电子制动系统10和/或驾驶员辅助系统20请求并接收估算车辆重量所需的信息。
82.控制部200可以通过通信接口310向电子制动系统10和/或驾驶员辅助系统20请求并接收制动踏板信号、制动压力信号以及车辆加速度信号。
83.制动踏板信号可以是从安装在电子制动系统10中并检测制动踏板的操作的踏板位移传感器输出的制动踏板信号。制动压力信号可以是从安装在电子制动系统10中并检测制动压力的制动压力传感器输出的压力信号。制动压力信号可以是从检测设置有电子驻车制动器100的车轮的车轮压力的车轮压力传感器输出的车轮压力信号。车辆加速度信号可以是从安装在驾驶员辅助系统20中并检测车辆的纵向加速度的纵向加速度传感器输出的加速度信号。作为参考,只要是能够提供制动踏板信号、制动压力信号以及车辆加速度信号的系统,控制部200就可以通过该系统来代替电子制动系统10和驾驶员辅助系统20接收上述信号。
84.当接收到制动踏板操作信号时,控制部200可以向电子制动系统10请求并接收制动压力信号和车辆加速度信号。
85.图4示出在根据一个实施例的电子驻车制动系统中估算车辆重量。
86.参照图4,控制部200可以根据车轮压力和车辆加速度估算车辆的重量。
87.控制部200可以根据车轮压力和车辆加速度估算车辆的重量。
88.控制部200可以在车辆行车制动(service braking)时根据车轮压力和车辆加速度估算车辆的重量。
89.当制动踏板被操作时,控制部200可以根据车轮压力和车辆加速度估算车辆的重量。
90.可以反向计算出产生车辆的制动力的压力p,并利用该压力p与在该压力p作用于卡钳时卡钳的活塞作用于制动垫的力的关系来推导出车辆的重量w和车辆加速度a的如下关系式。
[0091][0092]
重新整理上述式[1],则可以用如下式[2]来表示。
[0093][0094]
其中,a
cylinder
是活塞的截面积,n
piston
是活塞的数量,bf是制动因素(brake factor)(一般为2μ
pad
,μ
pad
是制动垫摩擦系数),η是效率,r
tire
是车轮半径,r
eff
是制动盘有效半径。
[0095]
图5示出在根据一个实施例的电子驻车制动系统中在车辆行车制动时估算车辆重量的结果。
[0096]
参照图5,纵轴表示估算的车辆重量,横轴表示估算数量。
[0097]
在驻车操作开始之前,可以在每一次的车辆行车制动时,根据车轮压力和车辆加速度反复估算并存储车辆的重量。
[0098]
可以将多个估算的车辆重量中最高的值估算为最终的车辆重量。
[0099]
另外,可以累计多个估算的车辆重量,并将累计值的平均值估算为最终的车辆重量。
[0100]
另一方面,在驻车操作之后解除驻车操作时,参照已估算的车辆重量,可将对该车辆重量增加或减去预设值(delta weight)所得的值估算为最终的车辆重量,或者可将先前估算的车辆重量重置为零,再重新估算车辆重量。
[0101]
图6示出在根据一个实施例的电子驻车制动系统中估算的每个车辆重量的夹紧力。
[0102]
参照图6,纵轴表示估算的车辆重量,横轴表示夹紧力。
[0103]
夹紧力可以随着估算的车辆重量的增加而增加。
[0104]
通过改变电子驻车制动系统的目标电流的方式,可以改变驻车所需的适当夹紧力。
[0105]
通过使供应到电动马达141的电流达到已改变的目标电流,可以产生根据车辆重量的适当夹紧力。
[0106]
图7示出根据一个实施例的电子驻车制动系统的控制方法。
[0107]
参照图7,控制部200可以估算车辆的重量(400)。
[0108]
控制部200可以判断驻车操作是否处于开始的状态(402)。此时,当驻车开关被操作为接通时,控制部200可以判断为驻车操作处于开始的状态。
[0109]
如果操作模式402的判断结果为驻车操作没有处于开始的状态,则控制部200可以返回到操作模式400以执行以下的操作模式。
[0110]
另一方面,当操作模式402的判断结果为驻车操作处于开始的状态时,控制部200可以根据车辆重量来确定夹紧力(404)。
[0111]
控制部200可以根据确定的夹紧力来控制电动马达以产生确定的夹紧力(406)。
[0112]
如上所述,虽然以最大重量行驶或运行的条件并不经常发生,但由于在传统情况下无法知道车辆的重量状态,只能以车辆的最大重量为基准设置驻车操作的夹紧力,因此,每个部件必然会被过度设计,从而可能会增加制造成本。
[0113]
然而,根据一个实施例的电子驻车制动系统根据车辆行车制动时的车轮压力和车辆加速度来估算车辆的重量以改变驻车所需的夹紧力,由此能够针对每个车辆重量状态灵活地控制夹紧力,从而可以在防止过度设计的同时预测车辆实际重量以产生驻车所需的夹紧力。
[0114]
图8示出根据另一个实施例的电子驻车制动系统的控制方法。
[0115]
参照图8,控制部200可以判断驻车操作是否处于开始的状态(500)。
[0116]
如果操作模式500的判断结果为驻车操作没有处于开始的状态,则控制部200可以通过通信接口310从车辆内的其它系统接收制动踏板信号(502),接收车轮压力信号(504),并接收车辆加速度信号(506)。
[0117]
当制动踏板正在被操作时,控制部200可以根据车轮压力和车辆加速度来计算车辆的重量(508)。
[0118]
另一方面,当操作模式500的判断结果为驻车操作处于开始的状态时,控制部200可以根据车辆重量来确定夹紧力(510)。
[0119]
控制部200可以根据确定的夹紧力来控制电动马达以产生确定的夹紧力(512)。
[0120]
图9示出根据又一个实施例的电子驻车制动系统的控制方法。
[0121]
参照图9,控制部200可以判断是否处于行车制动状态(600)。
[0122]
如果操作模式600的判断结果为处于行车制动状态,控制部200可以根据检测到或者从其它系统接收到的车轮压力和车辆加速度来计算车辆的重量(602)。
[0123]
控制部200可将计算出的车辆重量值存储在控制部中的存储器220中。
[0124]
控制部200可以从存储在存储器220中的车辆重量中确定最终的车辆重量(606)。可以将存储的车辆重量中最高的值确定为最终的车辆重量。
[0125]
另一方面,当操作模式600的判断结果为没有处于行车制动状态时,控制部200可以判断驻车操作是否处于开始的状态(608)。
[0126]
如果操作模式608的判断结果为驻车操作处于开始的状态时,控制部200可以根据最终的车辆重量来确定夹紧力(610)。
[0127]
控制部200可以根据确定的夹紧力来控制电动马达以产生确定的夹紧力(612)。
[0128]
如上所述,所公开的发明可以在防止过度设计的同时预测车辆实际重量以产生驻车所需的夹紧力。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。