1.本实用新型涉及一种工业机器人的抓取结构。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
3.工业机器人通常包括机械臂和抓取机构,抓取机构安装在机械臂上,机械臂带动抓取机构到抓取位置,抓取机构抓取工件。现有技术中,抓取机构多采用气动夹爪,气动夹爪结构简单、成本低,但是夹爪气缸直接驱动夹爪开闭,抓取动作比较硬,柔性度不够,抓取硅胶制品、食品半成品等比较软的工件时,就容易夹坏这些工件。
技术实现要素:
4.本实用新型的目的在于克服现有技术中存在的上述不足,而提供一种结构设计合理、柔性度好的工业机器人的抓取结构。
5.本实用新型解决上述问题所采用的技术方案是:一种工业机器人的抓取结构,包括机械臂和抓取机构,抓取机构安装在机械臂上,其特征在于:所述的抓取机构包括气缸、固定板、移动板和抓取手指;气缸的缸身固定安装在机械臂上;固定板固定安装在气缸的缸身上;移动板安装在气缸的输出轴上;抓取手指包括支撑板、抓取板、弹簧轴、弹簧和夹板;支撑板的内端铰接安装在固定板上;抓取板的内端铰接安装在移动板上,中部铰接安装在支撑板的外端;弹簧轴滑动安装在抓取板的外端;夹板固定安装在弹簧轴上;弹簧套装在弹簧轴上,其一端与夹板连接,另一端与抓取板连接。
6.本实用新型所述的机械臂为六轴机械臂。
7.本实用新型所述的抓取手指为多根,呈环形分布。
8.本实用新型所述的抓取手指为三根。
9.本实用新型所述的抓取板为l形。
10.本实用新型所述的夹板上设置有硅胶片。
11.本实用新型与现有技术相比,具有以下优点和效果:本实用新型柔性度好,特别适合硅胶制品、食品半成品等比较软的工件,抓取时不会夹坏这些工件。
附图说明
12.图1为本实用新型实施例的结构示意图。
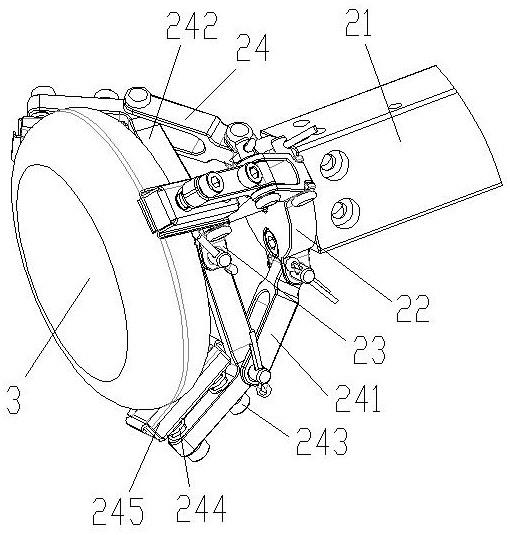
13.图2为本实用新型实施例抓取机构处的结构示意图。
具体实施方式
14.下面结合附图并通过实施例对本实用新型作进一步的详细说明,以下实施例是对
本实用新型的解释而本实用新型并不局限于以下实施例。
15.本实用新型实施例包括机械臂1和抓取机构2。
16.机械臂1为六轴机械臂。
17.抓取机构2安装在机械臂1上。抓取机构2包括气缸21、固定板22、移动板23和抓取手指24。
18.气缸21的缸身固定安装在机械臂1上。固定板22固定安装在气缸21的缸身上。移动板23安装在气缸21的输出轴上。
19.抓取手指24包括支撑板241、抓取板242、弹簧轴243、弹簧244和夹板245。
20.支撑板241的内端通过铰接轴铰接安装在固定板22上。抓取板242为l形,其内端通过铰接轴铰接安装在移动板23上,中部通过铰接轴铰接安装在支撑板241的外端。弹簧轴243滑动安装在抓取板242的外端。夹板245固定安装在弹簧轴243上。夹板245上设置有硅胶片,抓取时硅胶片与工件3接触,不易划坏工件3。弹簧244套装在弹簧轴243上,其一端与夹板245连接,另一端与抓取板242连接。
21.抓取手指24为多根,呈环形分布。本实施例中, 抓取手指24为三根。
22.工作时,机械臂1带动抓取机构2到抓取位置,气缸21带动移动板23内缩,移动板23内缩过程中,抓取板242向内转动,从而使得夹板245抓住工件3,完成抓取动作,弹簧244对夹板245起到缓冲的作用。抓取过程中,通过抓取板242、夹板245、弹簧244等结构的传动和缓冲,整个抓取动作柔性度好,特别适合硅胶制品、食品半成品等比较软的工件,抓取时不会夹坏这些工件。
23.此外,需要说明的是,本说明书中所描述的具体实施例,其零、部件的形状、所取名称等可以不同,本说明书中所描述的以上内容仅仅是对本实用新型结构所作的举例说明。凡依据本实用新型专利构思所述的构造、特征及原理所做的等效变化或者简单变化,均包括于本实用新型专利的保护范围内。
技术特征:
1.一种工业机器人的抓取结构,包括机械臂和抓取机构,抓取机构安装在机械臂上,其特征在于:所述的抓取机构包括气缸、固定板、移动板和抓取手指;气缸的缸身固定安装在机械臂上;固定板固定安装在气缸的缸身上;移动板安装在气缸的输出轴上;抓取手指包括支撑板、抓取板、弹簧轴、弹簧和夹板;支撑板的内端铰接安装在固定板上;抓取板的内端铰接安装在移动板上,中部铰接安装在支撑板的外端;弹簧轴滑动安装在抓取板的外端;夹板固定安装在弹簧轴上;弹簧套装在弹簧轴上,其一端与夹板连接,另一端与抓取板连接。2.根据权利要求1所述的工业机器人的抓取结构,其特征在于:所述的机械臂为六轴机械臂。3.根据权利要求1所述的工业机器人的抓取结构,其特征在于:所述的抓取手指为多根,呈环形分布。4.根据权利要求3所述的工业机器人的抓取结构,其特征在于:所述的抓取手指为三根。5.根据权利要求1所述的工业机器人的抓取结构,其特征在于:所述的抓取板为l形。6.根据权利要求1所述的工业机器人的抓取结构,其特征在于:所述的夹板上设置有硅胶片。
技术总结
本实用新型提供一种工业机器人的抓取结构,柔性度好,特别适合硅胶制品、食品半成品等比较软的工件,抓取时不会夹坏这些工件。气缸的缸身固定安装在机械臂上;固定板固定安装在气缸的缸身上;移动板安装在气缸的输出轴上;抓取手指包括支撑板、抓取板、弹簧轴、弹簧和夹板;支撑板的内端铰接安装在固定板上;抓取板的内端铰接安装在移动板上,中部铰接安装在支撑板的外端;弹簧轴滑动安装在抓取板的外端;夹板固定安装在弹簧轴上;弹簧套装在弹簧轴上,其一端与夹板连接,另一端与抓取板连接。另一端与抓取板连接。另一端与抓取板连接。
技术研发人员:张毅
受保护的技术使用者:江苏宝嵩机器人有限公司
技术研发日:2021.12.30
技术公布日:2022/7/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。