1.本发明属于自动驾驶的技术领域,具体涉及一种基于两侧车流自动减速的车速控制方法。
背景技术:
2.随着汽车智能化的快速发展,越来越多的汽车搭载有自动驾驶系统。在自动驾驶的过程中,自动驾驶系统一般通过定位信息获取地图上当前道路的限速情况和车流拥堵情况来确定自动驾驶的速度。受地图实时性和人为因素的影响,自动驾驶系统所确定的行驶速度很可能与周围车辆的行驶速度存在较大差距;当自动驾驶系统所确定的行驶速度远大于周围车辆的行驶速度时,旁车道较慢的车流会对本车驾驶员造成压迫感,导致驾驶员恐慌、不信任自动驾驶系统,甚至慌忙手动控制导致事故发生。
3.现有专利对于自动驾驶速度的控制基本都是针对巡航驾驶,通过获取前方车辆的速度对本车的行驶速度进行控制,以在保持一定车距的情况下使跟车行驶更为平滑舒适,如中国专利cn201711205382.1 自适应车速控制方法及其自适应车速控制装置。因此,需要提出一种基于两侧车流自动减速的车速控制方法,以根据周围车速自动调整自动驾驶的车速,在减少压迫感的同时,提高自动驾驶的安全性。
技术实现要素:
4.针对现有技术的上述不足,本发明要解决的技术问题是提供一种基于两侧车流自动减速的车速控制方法,解决目前自动驾驶中容易因旁车道车流较慢而导致驾驶员恐慌的问题,取得提高自动驾驶的舒适性和安全性的效果。
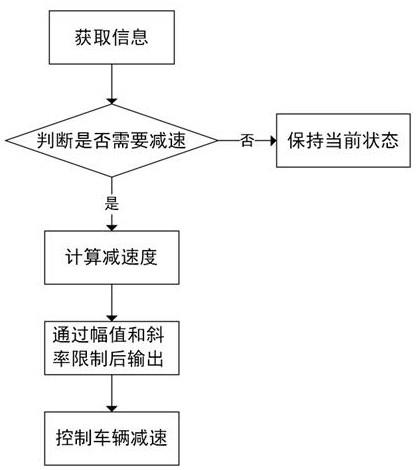
5.为解决上述技术问题,本发明采用如下技术方案:一种基于两侧车流自动减速的车速控制方法,包括如下步骤:1)获取本车的行驶速度和相邻车道前方各车辆的行驶信息;2)判断本车是否需要减速,是,则执行步骤3);否,则本车保持原状态行驶;3)计算本车所需的减速度;4)根据减速度控制车辆减速行驶。
6.进一步地,步骤1)中所述行驶信息包括前车的行驶速度和前车与本车的纵向距离。
7.进一步地,步骤1)还包括如下内容:定义相邻车道前方车辆为前车,定义与本车距离最近的前车为最近前车;当前车与最近前车的纵向距离小于30m且本车的行驶速度与前车的行驶速度的差值大于10m/s时,则累计一个count常数值。
8.进一步地,步骤2)中判断为本车需要减速的条件如下:count常数值大于等于2、本车的行驶速度大于50km/h且最近前车与本车的纵向距离小于50m。
9.进一步地,步骤3)包括如下子步骤:31)用各前车的行驶速度的和除以count常数值计算出平均车速;32)用平均车速减去本车的行驶速度计算出相对车速;33)用相对车速的平方除以2倍最近前车与本车的纵向距离计算出减速度。
10.进一步地,在步骤32)之前还需要对平均车速进行速度补偿,将平均车速与速度补偿值相减,补偿值为5m/s。
11.进一步地,在步骤33)之前还需要对最近前车与本车的纵向距离进行距离补偿,将最近前车与本车的纵向距离与距离补偿值相减,距离补偿值为2m。
12.进一步地,步骤4)包括如下子步骤:41)对减速度进行幅值限制;42)对减速度进行斜率限制;43)以经过步骤41)和42)处理输出的减速度控制车辆减速行驶。
13.进一步地,步骤41)中所述对减速度进行幅值限制的内容如下:定义幅值为[-0.5,0],当减速度的数值属于[-0.5,0]时,直接输出减速度;当减速度的数值小于-0.5时,输出-0.5m/s2作为减速度;当减速度的数值大于0时,输出0 m/s2作为减速度。
[0014]
进一步地,步骤42)所述对减速度进行斜率限制的内容如下:将本车当前的减速度作为基础以每秒0.5 m/s2向经过幅值限制后的减速度靠拢并持续输出。
[0015]
相比现有技术,本发明的有益效果如下:1、本发明所述基于两侧车流自动减速的车速控制方法,以本车的行驶速度和邻车道前方车辆的行驶速度和与本车的纵向距离为基础,判断本车是否需要减速,并计算本车所需的减速度;当本车相对周围车辆车速过快时,会自动控制减速,以减少对本车驾驶员和车内乘客的压迫感,避免恐慌,提高自动驾驶的安全性和舒适性。
[0016]
2、本发明所述基于两侧车流自动减速的车速控制方法,计算出减速度后还需要经过幅值限制和斜率限制后才输出控制车辆减速,幅值限制控制输出的减速度在一定范围内,避免车辆降速过大,影响正常行驶;斜率限制控制减速度以逐渐增加的形式持续输出,避免突然输出较大的减速度导致车速骤降,使控制车辆减速更为平缓,从而提高自动驾驶的安全性和舒适性。
附图说明
[0017]
图1为实施例的一种基于两侧车流自动减速的车速控制方法的流程图;图2为实施例所述车速控制方法的应用场景示意图。
具体实施方式
[0018]
下面结合附图对本发明的具体实施方式作进一步的详细说明。
[0019]
实施例:请参见图1,一种基于两侧车流自动减速的车速控制方法,包括如下步骤:1)获取信息,信息包括本车的行驶速度和相邻车道前方各车辆的行驶信息;
其中,所述行驶信息包括前车的行驶速度和前车与本车的纵向距离;步骤1)还包括如下内容:定义相邻车道前方车辆为前车,定义与本车距离最近的前车为最近前车;当前车与最近前车的纵向距离小于30m且本车的行驶速度与前车的行驶速度的差值大于10m/s时,则累计一个count常数值。
[0020]
2)判断本车是否需要减速,是,则执行步骤3);否,则按本车当前的行驶速度继续行驶;其中,判断为本车需要减速的条件如下:count常数值大于等于2、本车的行驶速度大于50km/h且最近前车与本车的纵向距离小于50m;3)计算本车所需的减速度;包括如下子步骤:31)用各前车的行驶速度的和除以count常数值计算出平均车速;32)用平均车速减去本车的行驶速度计算出相对车速;33)用相对车速的平方除以2倍最近前车与本车的纵向距离计算出减速度。
[0021]
4)根据减速度控制车辆减速行驶;包括如下子步骤:41)对减速度进行幅值限制;内容如下:定义幅值为[-0.5,0],当减速度的数值属于[-0.5,0]时,直接输出减速度;当减速度的数值小于-0.5时,输出-0.5m/s2作为减速度;当减速度的数值大于0时,输出0 m/s2作为减速度。
[0022]
42)对减速度进行斜率限制;内容如下:将本车当前的减速度作为基础以每秒0.5 m/s2向经过幅值限制后的减速度靠拢并持续输出。
[0023]
43)以经过步骤41)和42)处理输出的减速度控制车辆减速行驶。
[0024]
进一步地,在步骤32)之前还需要对平均车速进行速度补偿,将平均车速与速度补偿值相减,补偿值为5m/s。
[0025]
进一步地,在步骤33)之前还需要对最近前车与本车的纵向距离进行距离补偿,将最近前车与本车的纵向距离与距离补偿值相减,距离补偿值为2m。
[0026]
本发明所述基于两侧车流自动减速的车速控制方法,以本车的行驶速度和邻车道前方车辆的行驶速度和与本车的纵向距离为基础,判断本车是否需要减速,并计算本车所需的减速度;当本车相对周围车辆车速过快时,会自动控制减速,以减少对本车驾驶员和车内乘客的压迫感,避免恐慌;另外,计算出减速度后还需要经过幅值限制和斜率限制后才输出控制车辆减速,幅值限制控制输出的减速度在一定范围内,避免车辆降速过大,影响正常行驶;斜率限制控制减速度以逐渐增加的形式持续输出,避免突然输出较大的减速度导致车速骤降,使控制车辆减速更为平缓,从而提高自动驾驶的安全性和舒适性。
[0027]
请参见图2,为便于理解本方案,以图2所示场景示意图进行举例说明,如下:图2中,c1为本车,vh为本车的行驶速度,c2、c3、c4、c5分别表示本车相邻车道前方的车辆,对应的行驶速度分别为v2、v3、v4和v5,与本车的纵向距离分别为d2、d3、d4和d5;则c2为最近前车,c3、c4和c5为前车,且c3、c4和c5均满足累计count常数值的要求。
[0028]
对应步骤1)中,假定d5减去d2大于30m,d4减去d2小于30m,vh与v2、v3和v4的差值均大于10m/s,即前车c3和c4满足条件,则累计count常数值为2;
对应步骤2)中,假定vh大于50km/h且d2小于50m,则判断本车需要减速;对应步骤31)中,则v3与v4的和除以2得到平均车速v0;对应步骤32)中,平均车速v0减去5m/s后在减去vh计算得到相对车速vc;对应步骤33)中,相对车速vc的平方除以d2减2m计算得到减速度a。
[0029]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。