1.本发明涉及激光加工领域,具体涉及光纤激光打标机。
背景技术:
2.随着经济的发展和科技水平的不断提高,智能制造装备产业应运而生。光纤激光加工作为智能装备中新型的加工方式,是指用掺稀土元素玻璃光纤作为增益介质对工件进行加工的模式,光纤激光器在激光光纤通讯、激光空间远距通讯、工业造船、汽车制造、激光雕刻、激光打标、激光切割、印刷制辊、金属非金属钻孔/切割/焊接(铜焊、淬水、包层以及深度焊接)、军事国防安全、医疗器械仪器设备、大型基础建设等领域均有广泛应用,其中最为常见的就是在智能焊接系统中对金属的切割及焊接操作,光纤激光打标机就是其中的一种,光纤激光机的打标原理是以能量密度极高的激光束在计算机的控制下照射到需要打标的产品表面,烧蚀出想要的图形或文字,不仅操作精度高成品美观,且能够有效提高加工效率和加工质量。
3.激光打标设备在对工件的一面打标完成后,通常需要翻面后对其他面进行打标,但是现有的激光打标设备在翻面的过程中通常因为设备的震动冲击导致工件定位失准,需要重新定位后才能对工件的另一面完成打标,工作效率较低,同时完成达标后工件的拆卸繁琐,进一步影响工作效率。
技术实现要素:
4.根据现有技术的至少一个不足之处,本发明提出了光纤激光打标机,以解决现有的光纤激光打标机工作中容易定位失准,工作效率低的问题。
5.本发明的光纤激光打标机采用如下技术方案:包括操作台以及设置于操作台上的打标装置和夹持翻转组件;打标装置包括激光发生器和连接激光发生器的激光头,夹持翻转组件用于夹持和翻转工件,激光头与夹持翻转组件的相对位置可调节;夹持翻转组件包括安装座、夹持机构和翻转控制机构,安装座设置于操作台,安装座内插装有水平设置的转轴,转轴在翻转电机的驱动下转动,转轴远离翻转电机的一端通过主扭簧同轴连接有装夹盘,主扭簧一端连接转轴、另一端连接装夹盘且悬伸设置,安装座靠近装夹盘的一端固定设置有固定盘,夹持机构设置于装夹盘上以用于夹紧工件,翻转控制机构设置于装夹盘和固定盘之间,翻转控制机构用于控制装夹盘的转动角度;固定盘上设置有阻力结构,阻力结构用于增加装夹盘启动时的转动阻力。
6.可选地,阻力结构包括阻力销,阻力销通过弹性件与固定盘相连接,初始阻力销的端部抵接在装夹盘端面的凹坑内。
7.可选地,翻转控制机构包括角度控制环和角度锁止键,角度控制环夹设在装夹盘和固定盘之间,且与装夹盘和固定盘的外缘均转动连接;角度锁止键沿径向方向可滑动的插装于角度控制环,且与角度控制环之间通过压簧连接,压簧促使角度锁止键向角度控制环内部运动;
固定盘的外周壁设置有能够与角度锁止键卡接的刻度槽,装夹盘的外周壁设置有锁止缺口,锁止缺口与角度锁止键对应时,角度锁止键的下端伸入锁止缺口将装夹盘锁止。
8.可选地,夹持机构包括夹持部、锁止部和驱动部;夹持部包括螺杆,螺杆可转动地设置于装夹盘远离转轴的端面且沿装夹盘的径向延伸,螺杆上螺纹连接有两个夹持座,两个夹持座关于装夹盘的中心对称设置,每个夹持座上均通过夹持弹簧滑动连接有夹持板;锁止部包括锁止板,锁止板沿装夹盘的轴向可滑动的设置于装夹盘,锁止板上设置有若干锁止孔,夹持座靠近装夹盘的端面上设置有弹子,锁止板运动至弹子插入锁止孔内时将夹持座锁止;驱动部包括第一驱动单元和第二驱动单元,第一驱动单元用于控制螺杆转动,第二驱动单元用于控制锁止板移动。
9.可选地,第一驱动单元包括端面齿圈,端面齿圈可转动地套设于装夹盘的外周壁面,螺杆的两端均设置有与其同轴的齿轮,齿轮与端面齿圈啮合;端面齿圈上设置有把手。
10.可选地,第二驱动单元包括推环,推环可轴向移动的设置于固定盘,推环远离固定盘的一端滑动穿过装夹盘且与锁止板固定连接,把手可相对于端面齿圈轴向移动,把手上设置有拨杆,拨杆远离把手的一端穿过固定盘与推环连接,拨杆与把手和推环均可相对转动。
11.可选地,夹持翻转组件还包括解锁机构,解锁机构包括止旋环、螺纹内圈、若干弧形螺纹块、活动拉簧、第一弹簧和第二弹簧;止旋环与固定盘轴向滑动连接且周向止转,螺纹内圈位于止旋环的内侧且与止旋环单向转动连接,螺纹内圈仅能正向转动;第一弹簧远离螺纹内圈和止旋环的一端与推环连接、另一端悬空;第二弹簧一端与装夹盘的端面连接、另一端与螺纹内圈和止旋环背对第一弹簧的端面连接;若干弧形螺纹块的内端均通过滑动拉簧与推环连接,若干弧形螺纹块沿圆周方向均布设置于装夹盘且可沿装夹盘的径向同步滑动,弧形螺纹块的外弧面设置有外螺纹,螺纹内圈的内环面设置有内螺纹,弧形螺纹块沿径向外内移动预设距离后与螺纹内圈螺接;推环和弧形螺纹块上均设置有能够相互作用的楔面,推环向靠近工件的方向移动锁止工件时与固定盘脱离,且将弧形螺纹块顶推至与螺纹内圈相螺接;转轴在翻转电机断电后在外力的作用下仅能够反转。
12.可选地,推环靠近固定盘的一端具有回位凸起,固定盘上设置有回位缺口,初始回位凸起滑动插装于回位缺口内。
13.可选地,翻转电机与转轴通过锥齿轮传动连接,转轴远离装夹盘的一端套设有锁止轮,锁止轮与转轴单向转动连接,且转轴仅能向对于锁止轮反向转动;安装座上设置有线圈和电磁铁,电磁铁的下表面设置有与锁止轮匹配的齿牙,线圈失电时电磁铁与锁止轮抱合,线圈上电后电吸铁向上吸合与锁止轮脱离,翻转电机和线圈同时上电或失电。
14.可选地,操作台上设置有可沿工作台横向移动的横移定位板,横移定位板上设置有可相对于横移定位板纵向移动的纵移定位板,纵移定位板上设置有环形滑槽,安装座滑动设置于环形滑槽内;操作台上设置有竖臂,竖臂上设置有可上下滑动的滑移块,激光发生器设置于滑
移块,以实现激光头的上下移动。
15.本发明的有益效果是:本发明的光纤激光打标机中设置了夹持翻转组件对工件进行夹持和翻面,装夹工件的装夹盘和转轴之间通过主扭簧连接,固定盘上设置了用于增加装夹盘启动时转动阻力的阻力结构,通过主扭簧和阻力结构的配合,使得装夹盘启动和停止时均能受到主扭簧的缓冲,装夹盘慢速启动、慢速停止,避免装夹盘在翻转电机突然启停时受到较大的冲击载荷而导致工件夹持松动、定位失准,进而保证定位精度,在翻面结束后激光头可直接对工件进行再次打标,无需重复定位,提高工作效率。
16.进一步的,本发明中还设置了解锁机构,解锁时拔出角度锁止键,装夹盘即可自行复位,夹持机构的锁止部解锁,夹持部自行松开,操作便捷,减少人力劳动,进一步提高了工作效率。
附图说明
17.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,本领域技术人员应该理解,这些附图未必是按比例绘制的。
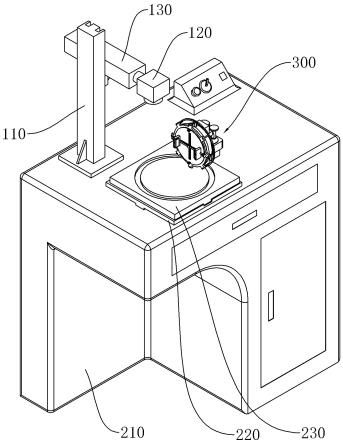
18.图1为本发明光纤激光打标机的整体结构示意图;图2为图1的正视图;图3为本发明中夹持翻转组件的结构示意图;图4为本发明中夹持翻转组件另一角度的示意图;图5为本发明中夹持翻转组件的正视图;图6为图5中a-a剖视图;图7为图6中ⅰ处放大图;图8为本发明中夹持翻转组件的局部剖切示意图;图9为图8中除去部分零部件的局部剖切示意图(除去转轴、安装座等零部件);图10为图9中除去部分零件的局部剖切示意图(除去把手、夹持机构等零部件);图11为图10中ⅱ处放大图;图12为本发明中角度锁止键与其他零部件的配合示意图;图13为本发明中装夹盘的结构示意图;图14为本发明中角度锁止键的结构示意图。
19.图中:110、竖臂;120、激光头;130、激光发生器;210、操作台;220、横移定位板;230、纵移定位板;300、夹持翻转组件;311、夹持板;312、夹持座;313、螺杆;314、端面齿圈;315、装夹盘;316、把手;317、锁止板;3151、锁止缺口;321、安装座;322、翻转电机;323、转轴;324、锁止轮;325、电磁铁;326、线圈;331、固定盘;332、角度控制环;333、角度锁止键;334、压簧;341、拨杆;342、推环;343、弧形螺纹块;344、滑动拉簧;345、第一弹簧;346、第二弹簧;347、螺纹内圈;348、止旋环;351、主扭簧;352、阻力销。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.如图1至图14所示,本发明的光纤激光打标机包括操作台210以及设置于操作台210上的打标装置和夹持翻转组件300;打标装置包括激光发生器130和连接激光发生器130的激光头120,夹持翻转组件300用于夹持和翻转工件,激光头120与夹持翻转组件300的相对位置可调节。
22.夹持翻转组件300包括安装座321、夹持机构和翻转控制机构。安装座321设置于操作台210,安装座321内插装有水平设置的转轴323,转轴323在翻转电机322的驱动下转动,转轴323远离翻转电机322的一端通过主扭簧351同轴连接有装夹盘315,主扭簧351一端连接转轴323、另一端连接装夹盘315且悬伸设置,安装座321靠近装夹盘315的一端固定设置有固定盘331,夹持机构设置于装夹盘315,夹持机构用于夹紧工件,翻转控制机构设置于装夹盘315和固定盘331之间,翻转控制机构用于控制装夹盘315的转动角度,在装夹盘315转动时实现对工件的精准翻面。
23.固定盘331上设置有作用于装夹盘315的阻力结构,阻力结构用于增加装夹盘315启动时的转动阻力。如图9所示,阻力结构包括阻力销352,阻力销352通过弹性件与固定盘331相连接,初始弹性件促使阻力销352向靠近装夹盘315的方向运动,以使得阻力销352的端部抵接在装夹盘315端面的凹坑内,装夹盘315转动初始,需要克服弹性件的弹力将阻力销352向固定盘331推动,以此增加装夹盘315的启动时的转动阻力,阻力销352从装夹盘315端面的凹坑内脱离后,不再对装夹盘315产生阻力。
24.在对工件进行打标之前,首先根据工件的翻面要求调节翻转控制机构,然后将工件装夹可靠,启动打标装置对工件的其中一面进行打标。该面打标结束需要翻面时,翻转电机322驱动转轴323正向转动进而带动装夹盘315转动,设定转轴323转动至预设角度时停转(该预设角度小于装夹盘315完成翻面需要转动的角度,例如设定转轴323旋转60
°
、装夹盘315旋转90
°
完成翻面)。转轴323转动时因为阻力结构的作用,装夹盘315想要转动需要首先克服阻力销352的弹性件的弹力,将阻力销352向固定盘331顶推,以使阻力销352从装夹盘315的凹坑内脱离,因此转轴323转动初期,装夹盘315不动,主扭簧351正向蓄力,装夹盘315在主扭簧351的缓冲作用下慢速启动,装夹盘315的启动转速会小于转轴323的转速,减小冲击造成的卡接松动。装夹盘315启动之后,阻力销352与装夹盘315的端面相对滑动,阻力销352不再对装夹盘315产生阻力,转轴323通过主扭簧351带动装夹盘315转动,装夹盘315的转速与转轴323的转速基本相同。转轴323停止后(也就是动力件停止),因装夹盘315和转轴323不是刚性连接,装夹盘315在惯性的作用下继续转动,装夹盘315继续转动时与主扭簧351正向蓄力的释放作用叠加,装夹盘315以较快转速转动,主扭簧351正向蓄力释放结束(恢复原始状态)后被装夹盘315带动反向蓄力,进而反作用与装夹盘315,使装夹盘315减速,装夹盘315在主扭簧351的作用下减速,直至转动至预设角度(翻面位置)后停止,完成翻面。通过主扭簧351和阻力结构的配合,使得装夹盘315启动和停止时均能受到主扭簧351的缓冲,装夹盘315慢速启动、慢速停止,避免装夹盘315在翻转电机322突然启停时受到较大的冲击载荷而导致工件夹持松动、定位失准,进而保证定位精度,在翻面结束后,激光头120可直接对工件进行再次打标,无需重复定位,提高工作效率。
25.在进一步的实施例中,如图6、图7和图12所示,翻转控制机构包括角度控制环332和角度锁止键333,角度控制环332夹设在装夹盘315和固定盘331之间,且与装夹盘315和固定盘331的外缘均转动连接。
26.角度锁止键333沿径向方向可滑动的插装于角度控制环332,且与角度控制环332之间通过压簧334连接,压簧334促使角度锁止键333向角度控制环332内部运动。
27.固定盘331的外周壁设置有能够与角度锁止键333卡接的刻度槽,装夹盘315的外周壁设置有锁止缺口3151,锁止缺口3151与角度锁止键333对应时,角度锁止键333的下端能够伸入锁止缺口3151,进而将装夹盘315锁止。角度锁止键333的下端设置有引导斜面,便于伸入锁止缺口3151。
28.需要调节翻转角度时,将角度锁止键333向外拉出至与装夹盘315的锁止缺口3151脱离,转动角度控制环332至合适刻度,松开角度锁止键333,角度锁止键333在压簧334的作用下向内运动与刻度槽卡接此时装夹盘315上的锁止缺口3151与角度锁止键333之间的角度为工件完成翻面所有转动的角度,装夹盘315转动至锁止缺口3151与角度锁止键333对应时被角度锁止键333锁止,工件完成翻面。
29.在进一步的实施例中,如图3、图6、图7和图8所示所示,夹持机构包括夹持部、锁止部和驱动部。
30.夹持部包括螺杆313,螺杆313可转动地设置于装夹盘315远离转轴323的端面且沿装夹盘315的径向延伸,螺杆313上螺纹连接有两个夹持座312,两个夹持座312关于装夹盘315的中心对称设置,每个夹持座312上均通过夹持弹簧滑动连接有夹持板311,螺杆313转动时带动两个夹持座312相互靠近或远离,以对工件进行夹持。需要说明的是,可根据工件的实际夹持需要设置多根螺杆313,也就是设置多组夹持部,以方便对工件的夹持,本发明中螺杆313设置有两根,且相互垂直(其中一根螺杆313上的夹持座312和夹持板311未示出),实际中可根据需要调节多跟螺杆313相互之间的角度。
31.锁止部包括锁止板317,锁止板317沿装夹盘315的轴向可滑动的设置于装夹盘315,锁止板317上设置有若干锁止孔,夹持座312靠近装夹盘315的端面上设置有弹子,锁止板317运动至弹子插入锁止孔内时将夹持座312锁止,以使夹持座312的位置固定,确保工件可靠夹持。驱动部包括驱动部包括第一驱动单元和第二驱动单元,第一驱动单元用于控制螺杆313转动,第二驱动单元用于控制锁止板317移动。
32.第一驱动单元包括端面齿圈314,端面齿圈314可转动地套设于装夹盘315的外周壁面,螺杆313的两端均设置有与其同轴的齿轮,齿轮与端面齿圈314啮合,端面齿圈314转动时带动齿轮转动,进而能够驱动螺杆313转动。端面齿圈314上设置有把手316,便于转动端面齿圈314。
33.第二驱动单元包括推环342,推环342可轴向移动的设置于固定盘331,推环342远离固定盘331的一端滑动穿过装夹盘315且与锁止板317固定连接,把手316可相对于端面齿圈314轴向移动,把手316上设置有拨杆341,拨杆341远离把手316的一端穿过固定盘331与推环342连接,拨杆341与把手316和推环342均可相对转动。
34.转动把手316夹紧工件后,将把手316向靠近工件的一端推动,把手316通过拨杆341带动推环342移动,推环342推动锁止板317向工件靠近,进而使得夹持座312的弹子插入锁止板317的锁止孔内将夹持座312锁止。
35.在进一步的实施例中,如图6、图7、图10和图11所示,夹持翻转组件300还包括解锁机构,解锁机构包括止旋环348、螺纹内圈347、若干弧形螺纹块343、滑动拉簧344、第一弹簧345和第二弹簧346。
36.止旋环348与固定盘331轴向滑动连接且周向止转,具体地说止旋环348与固定盘331靠近装夹盘315一端的内周壁以花键形式连接,螺纹内圈347位于止旋环348的内侧且与止旋环348单向转动连接,且螺纹内圈347仅能正向转动;第一弹簧345远离螺纹内圈347和止旋环348的一端与推环342连接、另一端悬空;第二弹簧346一端与装夹盘315的端面连接、另一端与螺纹内圈347和止旋环348背对第一弹簧345的端面连接。
37.若干弧形螺纹块343的内端均通过滑动拉簧344与推环342连接,若干弧形螺纹块343沿圆周方向均布设置于装夹盘315且可沿装夹盘315的径向同步滑动,弧形螺纹块343的外弧面设置有外螺纹,螺纹内圈347的内环面设置有内螺纹。弧形螺纹块343沿径向向外(靠近圆心为内,远离圆心为外)移动预设距离后能够与螺纹内圈347相螺接。也就是,初始弧形螺纹块343在滑动拉簧344的作用下靠近推环342,弧形螺纹块343此时与螺纹内圈347脱离(不接触),即螺纹内圈347和弧形螺纹块343在径向具有间隙,弧形螺纹块343向外移动预设距离后与螺纹内圈347接触,因弧形螺纹块343的外弧面设置有外螺纹,螺纹内圈347的内环面设置有内螺纹,弧形螺纹块343与螺纹内圈347接触后,两者螺纹齿牙对螺纹齿槽,匹配结合,实现螺接。
38.推环342靠近固定盘331的一端具有回位凸起,固定盘331上设置有回位缺口,初始回位凸起滑动插装于回位缺口内,推环342和弧形螺纹块343上均设置有能够相互作用的楔面。推环342向靠近工件的方向移动锁止工件时与回位缺口脱离,且将弧形螺纹块343顶推至与螺纹内圈347相螺接,同时带动第一弹簧345与螺纹内圈347和止旋环348接触(完成解锁准备)。
39.转轴323在翻转电机322断电后在外力的作用下仅能够反转(设定转轴323带动装夹盘315翻面为正传,反之为反转)。
40.在对翻转后的面打标结束后,拔出角度锁止键333,主扭簧351释放其反向蓄积的力,装夹盘315在主扭簧351的作用下反向旋转,装夹盘315反向转动的过程中带动推环342和弧形螺纹块343反向旋转,因为螺纹内圈347无法反转,此时螺纹内圈347和止旋环348一体连接,螺纹内圈347和止旋环348相对于弧形螺纹块343向远离工件的方向移动,螺纹内圈347和止旋环348挤压第一弹簧345,拉伸第二弹簧346。因脱离初始位置后,装夹盘315在正转翻面的过程中带动推环342转动,推环342上的回位凸起固定盘331上的回位缺口错位,此时推环342无法后退,第一弹簧345和第二弹簧346蓄力使得装夹盘315逐渐减速,装夹盘315反转到初始位置时,推环342上的回位凸起与固定盘331上的回位缺口对应,推环342后退,将装夹盘315卡在初始位置,同时因推环342后退,弧形螺纹块343在滑动拉簧344的作用下复位,弧形推块与螺纹内圈347脱离配合。推环342的后退也使得锁止板317对夹持座312的锁定解除,夹持部自动松开工件,无需手动松开。以此在打标结束后只需要松开角度锁止键333,整个装置即可自动复位,且自动松开工件,减少人力劳动,提高了效率。
41.在进一步的实施例中,如图8所示,翻转电机322与转轴323通过锥齿轮传动连接,转轴323远离装夹盘315的一端套设有锁止轮324,锁止轮324与转轴323单向转动连接,且转轴323仅能向对于锁止轮324反向转动。
42.安装座321上设置有线圈326和电磁铁325,电磁铁325的下表面设置有与锁止轮324匹配的齿牙,线圈326失电时电磁铁325与锁止轮324抱合,线圈326上电后电吸铁向上吸合与锁止轮324脱离,翻转电机322和线圈326同时上电或失电,通过此设置保证翻转电机322失电后,转轴323无法正向转动,装夹盘315反向复位时,转轴323可随之反向转动,确保装置可靠工作。
43.在进一步的实施例中,如图1所示,操作台210上设置有可横向移动的横移定位板220,横移定位板220上设置有可相对于横移定位板220纵向移动的纵移定位板230,纵移定位板230上设置有环形滑槽,安装座321滑动设置于环形滑槽内,以实现夹持翻转组件300在水平方向的方位调节。
44.操作台210上设置有竖臂110,竖臂110上设置有可上下滑动的滑移块,激光发生器130设置于滑移块,以实现激光头120的上下移动,以此实现激光头120和工件的定位。
45.操作台210内部设置有配电箱,台面上设置有操控面板,方便对装置进行电控操作。
46.通过以上,本发明的光纤激光打标机在工作时,整体操作步骤为:第一步,向外拉动角度锁止键333,然后将角度控制环332旋转到需要翻转的角度,放开角度锁止键333使其卡在固定盘331的刻度槽内,完成翻转角度设定。
47.第二步,旋转把手316,使得两个夹持座312相互靠近,对工件进行夹持,工件夹紧后,沿轴向向靠近工件的方向推动把手316,使锁止板317向靠近工件的方向移动将夹持座312锁定,完成对工件的可靠装夹。
48.工件装夹完成时,推环342的移动使得弧形螺纹块343与螺纹内圈347螺纹啮合,同时推环342移动后,其后端不再与固定盘331卡接,推环342可以自由转动,复位准备工作完成。
49.第三步,控制激光头120的高度,并调节夹持翻转组件300的位置,定位激光头120与工件的打标位置,启动激光头120打标。
50.第四步,一面打标结束需要翻面时,启动翻转电机322,翻转电机322上电的同时将线圈326同步上电,电磁铁325吸合,松开锁止轮324。翻转电机322带动转轴323转动,进而带动装夹盘315转动对工件进行翻面,翻转电机322转动预设角度后停止,装置自动准确完成翻面。
51.第五步,对翻转后的面打标。
52.第六步,打标结束后,拔出角度锁止键333,装夹盘315自动复位,同时工件的锁定解除,取下工件后进行后续工作。
53.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。