1.本发明涉及大型航天器零件加工技术领域,具体而言,涉及一种基于五轴并联模块的大型壁板移动式加工机器人。
背景技术:
2.以航空、航天为代表的高端制造业体现着国家科技的核心竞争力和重大需求。大型壁板是运载火箭、航天器舱体等装备的核心零部件,该类零件具有尺寸大、刚性弱、加工特征型面复杂的特点,在作业复杂性、质量一致性、加工效率和精度等方面对基础加工装备性能提出了严峻挑战。
3.相关技术中的大型壁板的加工,采用大型专用机床加工,资源冲突现象时有发生,严重影响型号任务的研制进度,而且大型专用机床受限于各种高精度部件,加工灵活性差,占用空间较大,对于工作空间和环境的适应性差。
技术实现要素:
4.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种基于五轴并联模块的大型壁板移动式加工机器人,该基于五轴并联模块的大型壁板移动式加工机器人具有适应性强、作业柔性高、加工精度高等优点。
5.为实现上述目的,根据本发明的实施例提出一种基于五轴并联模块的大型壁板移动式加工机器人,所述基于五轴并联模块的大型壁板移动式加工机器人包括:全向移动平台,所述全向移动平台上设有沿所述全向移动平台的长度方定向的径向导轨;径向动平台,所述径向动平台可滑动地设在所述径向导轨上,所述径向动平台上设有导向槽,所述导向槽内设有竖向导轨;竖向动平台,所述竖向动平台可滑动地设在所述导向槽内且与所述竖向导轨可滑动地配合;摆动平台,所述摆动平台可转动地设在所述竖向动平台的上端且转动轴线沿所述全向移动平台的轴向定向;五轴并联定位装置,所述五轴并联定位装置安装在所述摆动平台的上表面;加工装置,所述加工装置安装在所述五轴并联定位装置上。
6.根据本发明实施例的基于五轴并联模块的大型壁板移动式加工机器人,具有适应性强、作业柔性高、加工精度高等优点。
7.另外,根据本发明上述实施例的基于五轴并联模块的大型壁板移动式加工机器人还可以具有如下附加的技术特征:
8.根据本发明的一个实施例,所述基于五轴并联模块的大型壁板移动式加工机器人还包括用于驱动所述径向动平台的径向驱动装置。
9.根据本发明的一个实施例,所述径向驱动装置包括径向进给丝杠和径向进给电机,所述径向进给电机安装在所述全向移动平台上,所述径向进给丝杠与所述径向进给电机传动连接,所述径向进给丝杠与所述径向动平台的螺母螺纹配合。
10.根据本发明的一个实施例,还包括用于驱动所述竖向动平台上下移动且驱动所述摆动平台转动的复合驱动装置,所述复合驱动装置为两个且在所述全向移动平台的宽度方
向上位于所述摆动平台两侧。
11.根据本发明的一个实施例,所述复合驱动装置包括复合驱动丝杠、复合驱动电机和复合驱动连接座,所述复合驱动丝杠的上端与所述摆动平台可转动地相连,所述复合驱动连接座可转动地与所述径向动平台相连,所述复合驱动丝杠与所述复合驱动连接座的螺母螺纹配合,所述复合驱动电机安装在所述复合驱动连接座上。
12.根据本发明的一个实施例,所述复合驱动装置包括复合驱动滑块、复合驱动连杆、复合驱动导轨、复合驱动电机和复合驱动丝杠,所述复合驱动连杆的上端与所述摆动平台可转动地相连且下端与所述复合驱动滑块可转动地相连,所述复合驱动滑块可滑动地设在所述复合驱动导轨上,所述复合驱动导轨设在所述径向动平台上,所述复合驱动滑块与所述复合驱动丝杠螺纹配合,所述复合驱动丝杠与所述复合驱动电机传动连接。
13.根据本发明的一个实施例,所述基于五轴并联模块的大型壁板移动式加工机器人还包括直线光栅测距装置,所述直线光栅测距装置安装在所述竖向导轨上。
14.根据本发明的一个实施例,所述基于五轴并联模块的大型壁板移动式加工机器人还包括直线光栅测距装置,所述直线光栅测距装置安装在所述复合驱动导轨上。
15.根据本发明的一个实施例,所述五轴并联定位装置包括加工并联定位支架和五个加工支链,所述加工支链分别与所述加工并联定位支架和所述加工装置相连,所述加工并联定位支架与所述摆动平台相连,所述加工支链包括中空电机和滚珠丝杠,所述中空电机与所述滚珠丝杠传动连接且通过所述中空电机的转动带动所述滚珠丝杠沿中心轴线转动且沿轴向移动,所述中空电机通过第一加工铰链与所述加工并联定位支架相连,所述滚珠丝杠通过第二加工铰链与所述加工装置相连;或所述加工支链包括支链导轨、支链滑块、支链连杆和滑块电机,所述支链导轨与所述加工并联定位支架相连,所述支链滑块可滑动地设在所述支链导轨上,所述滑块电机与所述支链滑块传动连接,所述支链连杆的一端通过第一加工铰链与所述支链滑块相连且另一端通过第二加工铰链与所述加工装置相连;或所述加工支链包括电动缸、伸缩杆和伸缩电机,所述伸缩杆沿轴向可移动地设在所述电动缸内,所述伸缩电机设在所述电动缸上且与所述伸缩杆传动连接,所述电动缸通过第一加工铰链与所述加工并联定位支架相连,所述伸缩杆通过第二加工铰链与所述加工装置相连。
16.根据本发明的一个实施例,所述五轴并联定位装置包括所述滚珠丝杠和所述中空电机,五个所述第二加工铰链中的四个为双转动副铰链且一个为单转动副铰链,五个所述第一加工铰链均为双转动副铰链。
17.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
18.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
19.图1是根据本发明实施例的基于五轴并联模块的大型壁板移动式加工机器人的结构示意图。
20.图2是根据本发明一个具体实施例的基于五轴并联模块的大型壁板移动式加工机器人的局部结构示意图。
21.图3是根据本发明另一个具体实施例的基于五轴并联模块的大型壁板移动式加工机器人的局部结构示意图。
22.图4是根据本发明实施例的基于五轴并联模块的大型壁板移动式加工机器人的全向移动平台的结构示意图。
23.图5是根据本发明实施例的基于五轴并联模块的大型壁板移动式加工机器人的局部结构示意图。
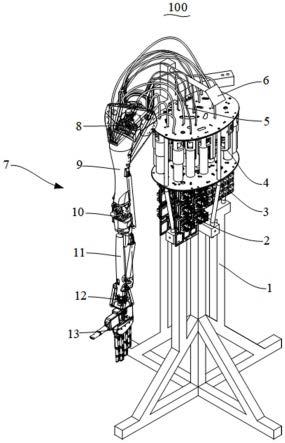
24.图6是根据本发明实施例的基于五轴并联模块的大型壁板移动式加工机器人的五轴并联定位装置的结构示意图。
25.附图标记:基于五轴并联模块的大型壁板移动式加工机器人1、全向移动平台100、径向导轨110、径向驱动装置120、径向进给丝杠121、径向进给电机122、径向动平台200、竖向导轨210、导向槽220、竖向动平台300、摆动平台400、五轴并联定位装置500、加工并联定位支架510、加工支链520、中空电机521、滚珠丝杠522、第一加工铰链530、第二加工铰链540、加工装置600、复合驱动装置700、复合驱动电机710、复合驱动丝杠720、复合驱动连接座730、复合驱动连杆740、复合驱动滑块750、复合驱动导轨760。
具体实施方式
26.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
27.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
28.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
29.下面参考附图描述根据本发明实施例的基于五轴并联模块的大型壁板移动式加工机器人1。
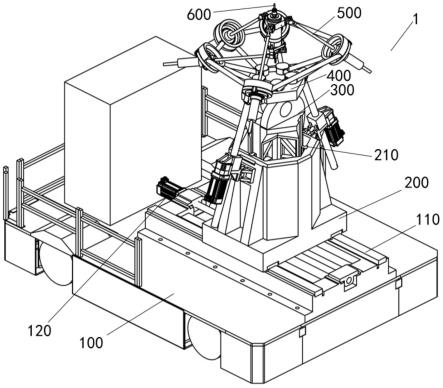
30.如图1-图6所示,根据本发明实施例的基于五轴并联模块的大型壁板移动式加工机器人1包括全向移动平台100、径向动平台200、竖向动平台300、摆动平台400、五轴并联定位装置500和加工装置600。
31.具体而言,全向移动平台200可以为agv运输车。
32.全向移动平台100上设有沿全向移动平台100的长度方定向的径向导轨110。径向动平台200可滑动地设在径向导轨110上,径向动平台200上设有导向槽220,导向槽220内设
有竖向导轨210。竖向动平台300可滑动地设在导向槽220内且与竖向导轨210可滑动地配合。摆动平台400可转动地设在竖向动平台300的上端且转动轴线沿全向移动平台100的轴向定向。五轴并联定位装置500安装在摆动平台400的上表面。加工装置600安装在五轴并联定位装置500上。
33.根据本发明实施例的基于五轴并联模块的大型壁板移动式加工机器人1,通过设置全向移动平台100,可以利用全向移动平台100带动径向动平台200、竖向动平台300、摆动平台400和五轴并联定位装置500进行整体移动,从而带动加工装置600进行移动。通过设置径向动平台200,可以通过径向动平台200带动竖向动平台300、摆动平台400和五轴并联定位装置500沿全向移动平台100的长度方向移动,从而实现加工装置600在全向移动平台100长度方向上的移动。通过设置竖向动平台300,可以通过竖向动平台300的上下移动调节加工装置600的高度。通过设置摆动平台400,可以利用摆动平台400带动五轴并联定位装置500摆动,从而带动加工装置600摆动。通过设置加工并联定位装置500,可以实现对加工装置600在多个自由度上的精细位置调节。
34.并且,通过利用五轴并联定位装置实现对加工装置600的定位,相比相关技术中的加工方式,基于五轴并联模块的大型壁板移动式加工机器人1具有更高的工作空间和环境的适应性,提高了加工作业的柔性,便于实现大型复杂构件的整体原位加工,便于保证加工精度,而且可以缓解资源冲突。
35.此外,通过设置全向移动平台100,可以利用全向移动平台100带动基于五轴并联模块的大型壁板移动式加工机器人1进行整体移动,使加工装置600能够移动至适合对所述待加工零件进行加工的位置,从而进一步提高工作空间和环境的适应性,提高加工灵活性。
36.另外,通过将五轴并联定位装置500设置在摆动平台400的上表面,可以便于加工装置600向上加工大型壁板零件的下表面,使基于五轴并联模块的大型壁板移动式加工机器人1适用于加工大型壁板零件的下表面,进一步提高基于五轴并联模块的大型壁板移动式加工机器人1的适用性。
37.因此,根据本发明实施例的基于五轴并联模块的大型壁板移动式加工机器人1具有适应性强、作业柔性高、加工精度高等优点。
38.下面参考附图描述根据本发明具体实施例的基于五轴并联模块的大型壁板移动式加工机器人1。
39.在本发明的一些具体实施例中,如图1-图6所示,根据本发明实施例的基于五轴并联模块的大型壁板移动式加工机器人1包括全向移动平台100、径向动平台200、竖向动平台300、摆动平台400、五轴并联定位装置500和加工装置600。
40.具体地,如图1和图5所示,基于五轴并联模块的大型壁板移动式加工机器人1还包括用于驱动所述径向动平台的径向驱动装置120。这样可以便于对径向动平台200的移动进行驱动,便于提高加工装置600径向移动的精度和准确性。
41.更为具体地,如图5所示,径向驱动装置120包括径向进给丝杠121和径向进给电机122,径向进给电机122安装在全向移动平台100上,径向进给丝杠121与径向进给电机122传动连接,径向进给丝杠121与径向动平台200的螺母螺纹配合。这样可以通过丝杠与动平台的螺母的螺纹配合将电机带动丝杠的转动转化为动平台在丝杠轴向上的移动,从而实现对径向动平台200的驱动。
42.有利地,如图1-图3所示,基于五轴并联模块的大型壁板移动式加工机器人1还包括用于驱动竖向动平台300上下移动且驱动摆动平台400转动的复合驱动装置700,复合驱动装置700为两个且在全向移动平台100的宽度方向上位于摆动平台400两侧。
43.在本发明的一些实施例中,如图1和图2所示,复合驱动装置700包括复合驱动丝杠720、复合驱动电机710和复合驱动连接座730,复合驱动丝杠720的上端与摆动平台400可转动地相连,复合驱动连接座730可转动地与径向动平台200相连,复合驱动丝杠720与复合驱动连接座730的螺母螺纹配合,复合驱动电机710安装在复合驱动连接座730上。这样可以通过丝杠与复合驱动连接座730的螺母的螺纹配合将电机带动丝杠的转动转化为复合驱动连接座730与丝杠在轴向上的相对移动,从而使复合驱动丝杠720沿中心轴线转动且沿轴向移动,使竖向动平台300升降或使摆动平台400向一侧摆动,以进一步实现对加工装置600高度和摆动角度的调节。
44.具体地,基于五轴并联模块的大型壁板移动式加工机器人1还包括直线光栅测距装置,所述直线光栅测距装置安装在竖向导轨210上。这样可以便于利用所述直线光栅测距装置形成位置闭环,实现加工装置600的高精运动控制。
45.在本发明的另一些实施例中,如图3所示,复合驱动装置700包括复合驱动滑块750、复合驱动连杆740、复合驱动导轨760、复合驱动电机710和复合驱动丝杠720,复合驱动连杆740的上端与摆动平台400可转动地相连且下端与复合驱动滑块750可转动地相连,复合驱动滑块750可滑动地设在复合驱动导轨760上,复合驱动导轨760设在径向动平台200上,复合驱动滑块750与复合驱动丝杠720螺纹配合,复合驱动丝杠720与复合驱动电机710传动连接。这样可以通过复合驱动丝杠720与复合驱动滑块750的螺纹配合将复合驱动电机710带动复合驱动丝杠720的转动转化为复合驱动滑块750沿复合驱动导轨760的升降,从而带动复合驱动连杆740升降,使竖向动平台300升降或使摆动平台400向一侧摆动,以进一步实现对加工装置600高度和摆动角度的调节。
46.本领域的技术人员可以理解的是,两个复合驱动装置700同步伸缩时,摆动平台400不摆动而竖向动平台300进行升降,两个复合驱动装置700中的一个伸缩时,竖向动平台300不进行升降而摆动平台400进行摆动,两个复合驱动装置700伸缩但不同步时,竖向动平台300升降且摆动平台400进行摆动。
47.具体地,基于五轴并联模块的大型壁板移动式加工机器人1还包括直线光栅测距装置,所述直线光栅测距装置安装在复合驱动导轨760上。这样可以便于利用所述直线光栅测距装置形成位置闭环,实现加工装置600的高精运动控制。
48.图6示出了根据本发明一些示例的基于五轴并联模块的大型壁板移动式加工机器人1。如图6所述,五轴并联定位装置500包括加工并联定位支架510和五个加工支链520,加工支链520分别与加工并联定位支架510和加工装置600相连,加工并联定位支架510与摆动平台400相连。这样可以利用支架连接多个支链,便于对加工装置600的多轴并联定位。
49.在本发明的一些实施例中,如图6所示,加工支链520包括中空电机521和滚珠丝杠522,中空电机521与滚珠丝杠522传动连接且通过中空电机521的转动带动滚珠丝杠522沿中心轴线转动且沿轴向移动,中空电机521通过第一加工铰链530与加工并联定位支架510相连,滚珠丝杠522通过第二加工铰链540与加工装置600相连。
50.在本发明的另一些实施例中,所述加工支链包括支链导轨、支链滑块、支链连杆和
滑块电机,所述支链导轨与所述加工并联定位支架相连,所述支链滑块可滑动地设在所述支链导轨上,所述滑块电机与所述支链滑块传动连接,所述支链连杆的一端通过第一加工铰链与所述支链滑块相连且另一端通过第二加工铰链与所述加工装置相连;
51.在本发明的另一些实施例中,所述加工支链包括电动缸、伸缩杆和伸缩电机,所述伸缩杆沿轴向可移动地设在所述电动缸内,所述伸缩电机设在所述电动缸上且与所述伸缩杆传动连接,所述电动缸通过第一加工铰链与所述加工并联定位支架相连,所述伸缩杆通过第二加工铰链与所述加工装置相连。
52.这样均可以实现对加工装置600的多轴驱动。
53.具体而言,第一加工铰链530、第二加工铰链540可以根据实际需要选择单转动副铰链、双转动副铰链或球铰链。
54.这里优选加工并联定位装置500的加工支链520包括滚珠丝杠522和中空电机521。五个第二加工铰链540中的四个为双转动副铰链且一个为单转动副铰链,五个第一加工铰链530均为双转动副铰链。
55.根据本发明实施例的基于五轴并联模块的大型壁板移动式加工机器人1的其他构成以及操作对于本领域普通技术人员而言都是已知的,这里不再详细描述。
56.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
57.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。