具有可成型远侧末端的粥样斑块切除导管
1.相关申请的交叉引用
2.本技术要求于2020年5月13日提交的题为“atherectomy catheter with shapeable distal tip”的美国临时专利申请63/024,306号和2019年10月18日提交的题为“atherectomy catheter with shapeable distal tip”的美国临时专利申请62/923,368号的优先权,上述申请分别整体通过引用并入。
3.本技术还可以涉及2017年6月30日提交的题为“atherectomy catheter with shapeable distal tip”的国际申请pct/us2017/040431号,该申请要求于2016年6月30日提交的题为“atherectomy catheter with shapeable distal tip”的美国临时专利申请62/357,173号的优先权,上述申请分别整体通过引用并入。
4.本技术还可以涉及2019年4月19日提交的题为“occlusion-crossing devices”的国际申请pct/us2019/028415号,该申请要求2018年11月16日提交的题为“occlusion-crossing devices”的美国临时专利申请62,768,769号和2018年4月19日提交的题为“occlusion-crossing devices”的美国临时专利申请62/660,185号的优先权,上述申请分别整体通过引用并入。
5.通过引用并入
6.本说明书中提及的所有出版物和专利申请以整体内容通过引用并入本文,如同每个单独的出版物或专利申请被具体地和单独地指明通过引用并入。
技术领域
7.本文描述了用于治疗阻塞的体腔的装置,诸如用于从血管去除阻塞物质的装置。特别地,本文描述了适于容易地对组织和血管内的斑块累积进行操作,以用于减积手术的粥样斑块切除导管。
背景技术:
8.动脉粥样硬化是动脉粥样化物质在人的动脉内累积导致的疾病。动脉粥样硬化的发生是自然老化过程的一部分,但也可能因人的饮食、高血压、血管损伤、遗传等而发生。动脉粥样硬化可能影响身体中的任何动脉,包括心脏、大脑、臂部、腿部、骨盆和肾中的动脉。动脉粥样硬化沉积物的性质也可能不同。一些沉积物相对较软,其它类型的沉积物可以是纤维状的,一些是钙化的,或是所有三种的组合。根据斑块积聚位置,可能引发不同的疾病。例如,当斑块在向心脏供应氧合血液的冠状动脉中累积时,会发生冠心病。如果斑块累积阻塞了颈动脉,即位于颈部两侧、向大脑供氧的动脉,则可能导致中风。
9.动脉粥样硬化可以通过多种方式治疗,包括药物治疗、旁路手术和基于导管的方法。粥样斑块切除术涉及切除或移除阻塞血管的物质。许多粥样斑块切除导管通常具有基本上直的中心轴线。然而,具有直轮廓的粥样斑块切除导管可能难以操纵为足够靠近动脉壁的内表面以去除所有斑块累积。此外,当斑块形成积聚在动脉的弯曲部分和更曲折部分中时,用这种直轮廓导管进行斑块去除可能比较复杂。
10.本文所述的粥样斑块切除导管解决了这些挑战中的一些。
技术实现要素:
11.本文描述了在血管中使用的粥样斑块切除导管。导管可以包括位于导管内的可旋转切割器。导管的形状可以被配置为例如在切割程序过程中有助于切割器的最佳定位。在一些情况下,当切割器在导管内平移时,切割器可以延伸穿过导管上的窗口。在一些情况下,切割器能够缩回导管中。
12.在一个实施例中,一种在血管中使用的粥样斑块切除导管,包括细长导管主体和环形切割器。细长导管主体包括具有预设曲率的固定凹凸(fixed jog)段和柔性段,柔性段具有比细长导管主体的其余部分更大的柔性。固定凹凸段和柔性段由其中包括多个周向狭缝的框架形成。
13.本实施例及其它实施例可以包括以下一个或多个特征。固定凹凸段中的框架还可以包括延伸穿过其中的纵向脊,纵向脊上没有狭缝。粥样斑块切除导管还可以包括切割窗口,环形切割器延伸穿过切割窗口。切割窗口可以设置在固定凹凸段和柔性段的远侧,以将切割器推入血管中。粥样斑块切除导管还可以包括设置在固定凹凸段的框架之上或之下的至少一个层压层。层压层可以由聚合物制成。框架可以由金属制成。多个周向狭缝可以以重复图案布置。固定凹凸段可以在细长导管主体中形成130
°
至160
°
的角度。框架还可以包括在固定凹凸段和柔性段之间延伸的没有狭缝的环形脊。柔性段可以被配置为被动地弯曲至130
°
至160
°
的角度。
14.一般地,在一个实施例中,一种在血管中使用的粥样斑块切除导管,包括细长导管主体、环形切割器,以及位于细长导管主体中的弯曲部分。弯曲部分可以具有多种形状中的任何一种,诸如s形。弯曲部分包括框架,框架具有通过纵向近侧脊和纵向远侧脊连接在一起的多个环形脊。纵向近侧脊被设置为呈大约180度远离纵向远侧脊。
15.本实施例及其它实施例可以包括以下一个或多个特征。多个环形脊可以包括第一环形脊、第二环形脊和第三环形脊。纵向近侧脊可以连接第一环形脊和第二环形脊,并且纵向远侧脊可以连接第二环形脊和第三环形脊。粥样斑块切除导管还可以包括切割窗口,环形切割器延伸穿过切割窗口。切割窗口可以设置在弯曲部分的远侧和s形弯曲的外圆周上,以将切割器推入血管中。s形弯曲部分可以被配置为通过在粥样斑块切除导管的轴上拉动或推动而致动。粥样斑块切除导管还可以包括设置在框架之上或之下的至少一个层压层。层压层可以由聚合物制成。框架可以由金属制成。远侧纵向脊可以设置为靠近切割器的暴露部分。远侧纵向脊可以位于细长导管主体的与切割器的暴露部分相同的一侧上。纵向近侧脊可以形成第一角度,并且纵向远侧脊可以形成第二角度。第一角度和第二角度可以沿相反的方向延伸,并且第一角度可以在140至160度之间,第二角度可以在140至160度之间。多个脊中的最远脊可以包括斜面远侧边缘。粥样斑块切除导管还可以包括鼻锥,鼻锥被配置为枢转远离细长主体以暴露切割器。斜面可以被配置为为鼻锥提供枢转空间。
16.一般地,在一个实施例中,一种在血管中使用的粥样斑块切除导管,包括细长导管主体、环形切割器,以及位于细长导管主体中的s形弯曲部分。弯曲部分包括具有近侧段和远侧段的框架。近侧段具有多个周向近侧狭缝和没有狭缝的纵向近侧脊,远侧段具有多个周向远侧狭缝和没有狭缝的纵向远侧脊。纵向近侧脊被设置为呈大约180度远离纵向远侧
脊。
17.本实施例及其它实施例可以包括以下一个或多个特征。粥样斑块切除导管还可以包括切割窗口,环形切割器延伸穿过切割窗口。切割窗口可以设置在远侧段的远侧和s形弯曲的外圆周上,以将切割器推入血管中。s形弯曲部分可以被配置为通过在粥样斑块切除导管的轴上拉动或推动而致动。粥样斑块切除导管还可以包括设置在框架之上或之下的至少一个层压层。层压层可以由聚合物制成。框架可以由金属制成。多个周向近侧狭缝可以以第一重复图案布置,并且多个周向远侧狭缝可以以第二重复图案布置。第一重复图案和第二重复图案可以彼此周向偏移。远侧纵向脊可以设置为靠近切割器的暴露部分。远侧纵向脊可以位于细长导管主体的与切割器的暴露部分相同的一侧上。近侧段可以形成第一角度,远侧段形成第二角度。第一角度和第二角度可以沿相反的方向延伸,并且第一角度可以在140至160度之间,第二角度可以在140至160度之间。框架还可以包括在近侧段和远侧段之间延伸的没有狭缝的环形脊。
18.一般地,在一个实施例中,一种在血管中使用的粥样斑块切除导管,包括细长导管主体、环形切割器,以及位于细长导管主体中的s形弯曲部分。弯曲部分包括具有近侧段和远侧段的框架。近侧段具有多个周向近侧狭缝和没有狭缝的纵向近侧脊,远侧段具有多个周向远侧狭缝和没有狭缝的纵向远侧脊。纵向近侧脊被设置为呈大约180度远离纵向远侧脊,并且周向狭缝为榫槽形式。
19.在一些示例中,一种粥样斑块切除装置,包括:导管,导管包括固定联接至近侧柔性段的远侧鼻锥,以及位于远侧鼻锥与近侧柔性段之间的切割器窗口,其中,近侧柔性段的曲率范围是可调节的;以及切割器,切割器联接至导管内的可旋转驱动轴,其中,切割器和可旋转驱动轴的近侧运动使得切割器沿第一方向倾斜并延伸穿过切割器窗口,其中,切割器和可旋转驱动轴的远侧运动使得切割器沿与第一方向相反的第二方向倾斜并缩回导管内。可以基于沿近侧方向施加至切割器和可旋转驱动轴的力的大小来调节近侧柔性段的曲率范围。切割器和可旋转驱动轴的初始近侧运动可以使得切割器沿第一方向倾斜并延伸穿过切割器窗口,其中,切割器和可旋转驱动轴的进一步近侧运动可以使柔性段弯曲。同样,切割器和可旋转驱动轴的远侧运动可以使得柔性段从弯曲状态伸直。近侧柔性段可以被配置为弯曲成s形。近侧柔性段可以被配置为基于近侧柔性段上的压缩量,经由切割器和可旋转驱动轴的近侧运动而递增地弯曲。切割器可以包括凸台,凸台被配置为沿导管的内表面的边缘滑动以径向地运动切割器并使切割器延伸穿过切割窗口。边缘可以相对于垂直于远侧鼻锥的纵向轴线的轴线倾斜。边缘可以被配置为当切割器的凸台沿边缘滑动时,使切割器相对于鼻锥倾斜。边缘可以位于导管的衬套上。切割器窗口可以位于导管的一侧上。
20.在一些示例中,一种粥样斑块切除装置,包括:导管,导管包括鼻锥,鼻锥在导管的固定弯曲部处固定联接至细长主体,其中,导管包括位于固定弯曲部的凸侧上的切割器窗口;以及切割器,切割器联接至导管内的可旋转驱动轴,其中,切割器和可旋转驱动轴的近侧运动使得切割器沿第一方向倾斜并延伸穿过切割器窗口,其中,切割器和可旋转驱动轴的远侧运动使得切割器沿与第一方向相反的第二方向倾斜并缩回导管内。切割窗口可以相对于固定弯曲部沿导管设置在远侧。切割器可以被配置为在延伸穿过切割窗口时径向运动。当切割器延伸穿过窗口时,切割器的切割刃的至少一部分可以对应于沿固定弯曲部的凸侧的最突出点。切割器可以被配置为在主动模式和被动模式之间转换,其中,切割器的切
割刃在主动模式下延伸穿过窗口,并且其中,切割器的切割刃在被动模式下缩回导管内。在主动模式下,切割器可以基本上平行于鼻锥,并且在被动模式下,切割器可以基本上平行于细长主体。切割器的切割刃可以通过棘爪保持在被动模式,棘爪需要施加至可旋转驱动轴的阈值平移力以释放棘爪并使切割器从被动模式转换。切割器可以包括为导管的内表面提供间隙的环形槽。切割器在主动模式和被动模式下可以是可旋转的。切割器可以包括成像传感器,成像传感器被配置为在切割器处于主动模式和被动模式时收集导管外部的图像。导管可以包括一个或多个开口,该一个或多个开口被配置为与成像传感器对准,并且在切割器处于主动模式时用作成像传感器的位置标记。固定弯曲部的角度可以在1度至30度的范围内。当切割器延伸穿过切割窗口时,切割器的中心轴线可以相对于远侧鼻锥的中心轴线成1度至30度范围内的角度。切割器可以包括凸台,凸台被配置为沿导管的内腔中的边缘滑动,以在切割器和可旋转驱动轴向近侧运动时,径向地运动切割器并使切割器延伸穿过切割窗口。导管的内腔可以限定第一通道和第二通道,其中,内腔中的倾斜边缘被配置为在切割器和可旋转驱动轴向近侧运动时,将切割器从第一通道推至第二通道。切割器可以被配置为向远侧运动以将组织填塞至远侧鼻锥中。切割器可以被配置为在平行于鼻锥和平行于细长主体之间转换。细长主体可以包括相对于固定弯曲部设置在近侧的柔性段,其中,近侧柔性段的曲率范围是可调节的。柔性段可以被配置为在切割器和可旋转驱动轴在导管内进一步向近侧运动时呈现s形弯曲形状。
21.在一些示例中,一种粥样斑块切除装置,包括:导管,导管包括固定联接至柔性段的远侧鼻锥,以及位于远侧鼻锥与柔性段之间的切割器窗口,其中,柔性段包括位于柔性段的一侧的纵向脊;以及切割器,切割器联接至导管内的可旋转驱动轴,其中,切割器和可旋转驱动轴的近侧运动使得切割器沿第一方向倾斜并延伸穿过切割器窗口,其中,沿近侧方向施加至可旋转轴的力使得柔性段远离纵向脊弯曲并呈一曲率,并且其中,切割器和可旋转驱动轴的远侧运动使得切割器沿与第一方向相反的第二方向倾斜并缩回切割器窗口内。可以基于沿近侧方向施加至切割器和可旋转驱动轴的力的大小来调节柔性段的曲率范围。近侧柔性段可以被配置为弯曲成s形。柔性段可以被配置为基于柔性段上的压缩量,经由切割器和可旋转驱动轴的近侧运动而递增地弯曲。切割器可以包括凸台,凸台被配置为沿导管的内表面的边缘滑动以径向地运动切割器并使切割器延伸穿过切割器窗口。边缘可以相对于垂直于远侧鼻锥的纵向轴线的轴线倾斜。边缘可以被配置为当切割器的凸台沿边缘滑动时,使切割器相对于鼻锥倾斜。边缘可以位于导管的衬套上。粥样斑块切除装置还可以包括位于导管近端的手柄,其中,手柄包括锁,锁被配置为将柔性段锁定成具有选定曲率范围的弯曲形状。锁可以被配置为允许用户选择驱动轴相对于导管0.026英寸或更少的锁定位置。锁可以包括滑块按钮,滑块按钮被配置为向远侧和近侧滑动。向近侧滑动滑块按钮可以增加柔性段的曲率。滑块按钮可以包括齿,齿被配置为与手柄内的对应齿啮合,以锁定驱动轴相对于导管的轴向位置。手柄可以包括弹簧,弹簧向滑块按钮施加压力,以保持滑块按钮的齿与手柄内的对应齿啮合。滑块按钮可以被配置为在用户按压滑块按钮时压缩弹簧,以使滑块按钮的齿与手柄内的对应齿分离。手柄可以包括脊接头,脊接头允许滑块按钮相对于驱动轴轴向平移,同时允许驱动轴相对于滑块按钮旋转。柔性段可以包括与第二部分轴向相邻的第一部分,第一部分具有第一纵向脊,第二部分具有第二纵向脊,其中,第一纵向脊和第二纵向脊位于柔性段的相对侧上,并且其中,沿近侧方向施加至可旋转轴的力使得
第一部分远离第一纵向脊横向弯曲,并且第二部分远离第二纵向脊横向弯曲。
22.在一些示例中,一种粥样斑块切除装置,包括:导管,导管包括鼻锥,鼻锥在导管的固定弯曲部处固定联接至细长主体,其中,导管包括位于固定弯曲部的凸侧上的切割器窗口;以及切割器,切割器联接至导管内的可旋转驱动轴,其中,切割器和可旋转驱动轴的近侧运动使得切割器沿第一方向倾斜并延伸穿过切割器窗口,其中,切割器和可旋转驱动轴的远侧运动使得切割器沿与第一方向相反的第二方向倾斜并缩回导管内。切割器窗口可以相对于固定弯曲部沿导管设置在远侧。切割器可以被配置为在延伸穿过切割器窗口时径向运动。当切割器延伸穿过切割器窗口时,切割器的切割刃的至少一部分可以对应于沿固定弯曲部的凸侧的最突出点。切割器可以被配置为在主动模式和被动模式之间转换,其中,切割器的切割刃在主动模式下延伸穿过切割器窗口,并且其中,切割器的切割刃在被动模式下缩回导管内。在主动模式下,切割器可以基本上平行于鼻锥,并且在被动模式下,切割器可以基本上平行于细长主体。切割器的切割刃可以通过棘爪保持在被动模式,棘爪需要施加至可旋转驱动轴的阈值平移力以释放棘爪并使切割器从被动模式转换。切割器在主动模式和被动模式下可以是可旋转的。切割器可以包括成像传感器,成像传感器被配置为在切割器处于主动模式和被动模式时收集导管外部的图像。导管可以包括一个或多个开口,该一个或多个开口被配置为与成像传感器对准,并且在切割器处于主动模式时用作成像传感器的位置标记。固定弯曲部的角度可以在1度至30度的范围内。当切割器延伸穿过切割器窗口时,切割器的中心轴线相对于远侧鼻锥的中心轴线成1度至30度范围内的角度。切割器可以包括凸台,凸台被配置为沿导管的内腔中的边缘滑动,以在切割器和可旋转驱动轴向近侧运动时,径向地运动切割器并使切割器延伸穿过切割器窗口。导管的内腔限定第一通道和第二通道,其中,内腔中的倾斜边缘被配置为在切割器和可旋转驱动轴向近侧运动时,将切割器从第一通道推至第二通道。切割器可以被配置为向远侧运动以将组织填塞至远侧鼻锥中。切割器可以被配置为在平行于鼻锥和平行于细长主体之间转换。细长主体可以包括相对于固定弯曲部设置在近侧的柔性段,其中,可以基于切割器和可旋转驱动轴相对于导管的近侧运动范围来调节柔性段的曲率范围。柔性段可以被配置为在切割器和可旋转驱动轴在导管内向近侧运动时呈现s形弯曲。粥样斑块切除装置还可以包括位于导管近端的手柄,其中,手柄包括锁,锁被配置为将柔性段锁定成弯曲形状。锁可以被配置为允许用户选择驱动轴相对于导管0.026英寸或更少的锁定位置。锁可以包括滑块按钮,滑块按钮被配置为向远侧和近侧滑动。向近侧滑动滑块按钮可以增加柔性段的曲率。手柄可以包括脊接头,脊接头允许滑块按钮相对于驱动轴轴向平移,同时允许驱动轴相对于滑块按钮旋转。柔性段可以包括与第二部分轴向相邻的第一部分,第一部分具有第一纵向脊,第二部分具有第二纵向脊,其中,第一纵向脊和第二纵向脊位于柔性段的相对侧上,并且其中,沿近侧方向施加至可旋转轴的力使得第一部分远离第一纵向脊横向弯曲,并且第二部分远离第二纵向脊横向弯曲。细长主体可以包括相对于固定弯曲部设置在近侧的柔性段,柔性段包括与第二部分轴向相邻的第一部分,第一部分具有第一纵向脊,第二部分具有第二纵向脊,其中,第一纵向脊和第二纵向脊位于柔性段的相对侧上。可旋转轴的进一步近侧运动可以使得柔性段压缩,从而使第一部分远离第一纵向脊横向弯曲,并且第二部分远离第二纵向脊横向弯曲,从而使柔性段呈现s形。固定弯曲部的角度可以在约1
°
至30
°
的范围内。
23.在一些示例中,一种粥样斑块切除装置的使用方法,该粥样斑块切除装置包括切
割器,切割器联接至导管内的可旋转驱动轴,导管具有固定联接至柔性段的远侧鼻锥,以及位于远侧鼻锥与柔性段之间的切割器窗口,该方法包括:在导管内向近侧运动可旋转驱动轴,以使切割器沿第一方向倾斜并延伸穿过切割器窗口;在导管内进一步向近侧运动可旋转驱动轴,以使柔性段远离柔性段的纵向脊弯曲,从而使柔性段呈现曲率;以及在导管内向远侧运动可旋转驱动轴,以使切割器沿与第一方向相反的第二方向倾斜并缩回导管内。该方法还可以包括在导管内向远侧运动可旋转驱动轴,以使柔性段伸直。向远侧运动可旋转驱动轴可以包括向远侧滑动粥样斑块切除装置的手柄上的滑块按钮,其中,向近侧运动可旋转驱动轴包括向近侧滑动滑块按钮。该方法还可以包括向近侧滑动粥样斑块切除装置的手柄上的滑块按钮,以增加柔性段的曲率。该方法还可以包括通过控制滑块按钮的远侧和近侧运动,选择柔性段的曲率范围。该方法还可以包括使用位于导管近端的手柄,将柔性段锁定为选定曲率的弯曲形状。向近侧运动可旋转驱动轴以使切割器延伸穿过切割器窗口可以包括使切割器的凸台沿导管的内表面的边缘滑动,以径向地运动切割器并使切割器延伸穿过切割器窗口。边缘可以相对于垂直于远侧鼻锥的纵向轴线的轴线倾斜。边缘可以被配置为当切割器的凸台沿边缘滑动时,使切割器相对于鼻锥倾斜。切割器窗口可以位于导管的一侧上。柔性段可以包括与第二部分轴向相邻的第一部分,第一部分具有第一纵向脊,第二部分具有第二纵向脊,其中,第一纵向脊和第二纵向脊位于柔性段的相对侧上,并且其中,进一步向近侧运动可旋转驱动轴使得第一部分远离第一纵向脊横向弯曲,并且第二部分远离第二纵向脊横向弯曲,从而使柔性段呈现s形。该方法还可以包括旋转可旋转驱动轴,同时使用联接至可旋转驱动轴的成像传感器拍摄导管外部的图像。该方法还可以包括通过旋转可旋转驱动轴来切割导管外部的组织。
24.在一些示例中,一种粥样斑块切除装置的使用方法,该粥样斑块切除装置包括切割器,切割器联接至导管内的可旋转驱动轴,导管包括鼻锥,鼻锥在导管的固定弯曲部处固定联接至细长主体,该方法包括:在导管内向近侧运动可旋转驱动轴,以使切割器沿第一方向倾斜并延伸穿过切割器窗口;以及在导管内向远侧运动可旋转驱动轴,以使切割器沿与第一方向相反的第二方向倾斜并缩回切割器窗口内。固定弯曲部的角度可以在约1
°
至30
°
的范围内。切割器可以在延伸穿过切割器窗口时相对于导管径向运动。当切割器延伸穿过切割器窗口时,切割器的切割刃的至少一部分可以对应于沿固定弯曲部的凸侧的最突出点。切割器的切割刃在主动模式下可以延伸穿过切割器窗口,并且其中,切割器的切割刃在被动模式下缩回导管内。在主动模式下,切割器可以基本上平行于鼻锥,并且在被动模式下,切割器可以基本上平行于细长主体。切割器的切割刃可以通过棘爪保持在被动模式,该方法还包括向可旋转驱动轴施加阈值平移力,以释放棘爪并使切割器从被动模式转换。切割器在主动模式和被动模式下可以是可旋转的。该方法还可以包括使用联接至可旋转驱动轴的成像传感器采集导管外部的图像。导管可以包括一个或多个开口,该一个或多个开口被配置为与成像传感器对准,并且用作成像传感器的位置标记。向近侧运动可旋转驱动轴以使切割器延伸穿过切割器窗口可以包括使切割器的凸台沿导管的内表面的边缘滑动,以径向地运动切割器并使切割器延伸穿过切割器窗口。该方法还可以包括向远侧运动切割器以将组织填塞至鼻锥中。在导管内向近侧运动可旋转驱动轴,以使切割器沿第一方向倾斜并延伸穿过切割器窗口可以包括使切割器在平行于鼻锥和平行于细长主体之间转换。细长主体可以包括相对于固定弯曲部设置在近侧的柔性段,该方法还包括在导管内进一步向近
侧运动可旋转驱动轴,以使柔性段弯曲。该方法还可以包括通过控制可旋转驱动轴在导管内的近侧运动程度来调节弯曲的曲率。柔性段可以被配置为在可旋转驱动轴在导管内向近侧运动时呈现s形弯曲。该方法还可以包括使用位于导管近端的手柄,将柔性段锁定为选定曲率的弯曲形状。向远侧运动可旋转驱动轴可以包括向远侧滑动粥样斑块切除装置的手柄上的滑块按钮,其中,向近侧运动可旋转驱动轴包括向近侧滑动滑块按钮。该方法还可以包括向近侧滑动粥样斑块切除装置的手柄上的滑块按钮,以增加细长主体的柔性段的曲率。该方法还可以包括将切割器锁定在切割器延伸穿过切割器窗口的主动模式。向近侧运动可旋转驱动轴可以包括按压并向近侧运动粥样斑块切除装置的手柄上的滑块按钮,其中,将切割器锁定在主动模式包括释放滑块按钮。该方法还可以包括将切割器锁定在切割器缩回切割器窗口内的被动模式。向远侧运动可旋转驱动轴可以包括按压并向远侧运动粥样斑块切除装置的手柄上的滑块按钮,其中,将切割器锁定在被动模式包括释放滑块按钮。该方法还可以包括旋转可旋转驱动轴,同时使用联接至可旋转驱动轴的成像传感器拍摄导管外部的图像。该方法还可以包括通过旋转可旋转驱动轴来切割导管外部的组织。
25.本文描述了这些及其它方面和优点。
附图说明
26.本发明的新颖性特征在权利要求书中具体列出。说明书中列出了利用本发明原理的一些描述性实施例,其中包括本发明利用的原理,结合说明书和附图,可以更好地理解本发明的特征和优势。在附图中:
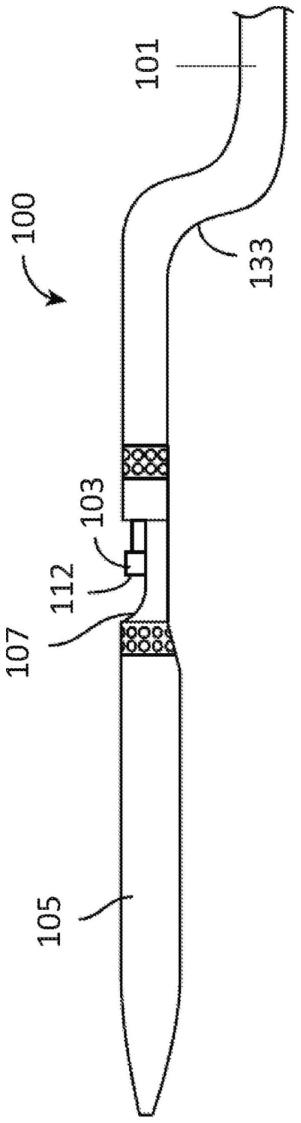
27.图1a示出具有固定凹凸的粥样斑块切除导管。
28.图1b示出位于血管中的图1a的粥样斑块切除导管。
29.图2示出图1a的粥样斑块切除导管的相对角度和尺寸图。
30.图3a示出粥样斑块切除导管的远端的变型,该变型包括用户致动弯曲部分,该弯曲部分具有加强构件,使得导管在被致动时变形为预定弯曲构型。
31.图3b示出图3a的粥样斑块切除导管的加强构件示意图。
32.图4a和4b示出具有远侧弯曲部分的粥样斑块切除导管的另一实施例。
33.图5a是粥样斑块切除导管的用户致动弯曲部分的俯视图。
34.图5b和5c是图5a的弯曲部分的透视图。
35.图5d是图5a的弯曲部分的扁平视图。
36.图6a示出包括用户致动弯曲部分的另一实施例的粥样斑块切除导管。
37.图6b示出包括环形脊和纵向脊的图6a的弯曲部分的框架。
38.图6c示出图6b的脊的侧视图。
39.图6d示出图6b的脊的横截面图。
40.图6e是图6b的脊的扁平视图。
41.图7a示出包括固定凹凸段和柔性段的粥样斑块切除导管的一部分。
42.图7b示出图7a的导管的弯曲部分的扁平视图。
43.图8a示出与粥样斑块切除导管一起使用的示例性柔性鼻锥。
44.图8b示出图8a的鼻锥的一部分的扁平视图。
45.图9a示出包括用户致动弯曲部分的另一实施例的粥样斑块切除导管。图9a中的导
管处于伸直构型。
46.图9b示出处于弯曲或被致动构型的图9a的粥样斑块切除导管。
47.图9c是图9a的导管的弯曲部分处于伸直构型的底部特写图。
48.图9d是图9a的导管的弯曲部分处于伸直构型的顶部特写图。
49.图9e是处于弯曲或被致动构型的图9a的导管的弯曲部分的特写图。
50.图9f是处于弯曲或被致动构型的图9a的导管的弯曲部分的另一特写图。
51.图10a示出具有衬套的导管的局部特写剖视图,衬套被配置为引导切割器运动穿过切割窗口。
52.图10b、10c和10d示出当切割器逐渐运动穿过切割窗口时,图10a的导管的局部特写剖视图。
53.图11a、11b和11c示出具有被配置为呈弯曲形状的柔性段的导管的侧视图。
54.图12示出具有被配置为呈弯曲形状的柔性段的另一导管的侧视图。
55.图13a示出具有固定弯曲部的导管的侧视图。
56.图13b示出图13a的导管的固定弯曲部的特写图。
57.图13c示出图13a的导管的局部特写剖视图,其中示出切割器处于被动模式。
58.图13d示出图13a的导管的局部特写剖视图,其中示出切割器处于主动模式。
59.图13e示出图13a的导管的局部特写剖视图,其中示出切割器处于被动模式和主动模式之间。
60.图14a示出用于具有固定弯曲部的导管的示例切割器和衬套的透视图。
61.图14b示出图14a的切割器和衬套的剖视图。
62.图14c示出图14a所示的衬套的近侧透视图。
63.图14d示出图14a所示的衬套的远侧透视图。
64.图14e示出图14a所示的衬套的剖视图。
65.图14f示出图14a所示的衬套的另一剖视图。
66.图14g示出图14a的切割器和衬套的剖视图,其中示出用于将切割器保持在被动模式的棘爪。
67.图15a至15c示出手柄的一部分的剖视图,手柄具有滑块锁,用于锁定驱动轴相对于导管的轴向位置:图15a示出在远侧位置接合的滑块锁;图15b示出在远侧位置未接合的滑块锁;并且图15c示出在近侧位置接合的滑块锁。
具体实施方式
68.本文描述了一种具有细长主体的粥样斑块切除导管,该细长主体包括弯曲远侧部分、鼻锥和可旋转环形切割器。弯曲部分(也可以称为弯曲/可弯曲部分或凹凸机构)可以有利地用于抵靠血管壁推动切割器以提高切割效率。
69.图1a和1b示出示例性粥样斑块切除导管100,包括沿细长导管主体的弯曲部分。参考图1a至图2,粥样斑块切除导管100可以包括具有弯曲部分133的导管主体101、位于导管主体101远端的可旋转环形切割器103,以及位于导管主体101远端的鼻锥105。鼻锥105可以包括切割窗口107,切割窗口107被配置为允许切割器103从中切割穿过。导管101还可以包括位于导管主体101中的弯曲部分133,以抵靠血管壁径向地推动切割器103。
70.弯曲部分133可以是固定凹凸(即具有预设形状)。此外,弯曲部分可以是弯曲的或弯折的,使得切割窗口107位于弯曲部分133的径向最外部(从而允许在使用时抵靠血管壁推动切割窗口107)。在一个实施例中,弯曲部分133可以例如通过使用嵌入外轴中的预偏转形状设定的镍钛诺带段来预成型。弯曲部分133可以具有有利地相对于血管壁定位切割器103以用于切割的形状。在一些情况下,弯曲部分133可以具有相反曲率(即一个向上弯曲,另一个向下弯曲)的两个拐点155、166,以形成近似“s”形。在一个实施例中,s形可以被配置为使得导管主体101的远端偏离但基本平行于导管主体101的近端。在其它实施例中,导管主体101的远端和近端可以彼此成很小的角度,以控制切割器与血管壁的接合角度。
71.因此,如图2所示,弯曲部分133的“s形”可以包括近侧段137,近侧段137具有从远侧拐点155的中心延伸至近侧拐点166的中心的长度b。此外,弯曲部分133可以包括远侧段135,远侧段135具有从切割刃112延伸至远侧拐点155的中心的长度a。此外,在“s形”的远端可以有远侧角1,在“s形”的近端可以有近侧角2。可以调节这些长度(a、b)和角度(1、2)以实现期望的凹凸或偏移,从而获得最佳组织壁附着。例如,长度a可以比长度b短,以确保切割器尽可能地接近角度1,从而提供切割器303的更好附着。角度1和角度2可以在120至180度之间,诸如140至160度之间。在一个示例中,长度a在5mm至10mm之间,长度b在10mm至15mm之间,角度1是140度,并且角度2是160度,以用于被配置为在血管中使用的直径为2.5至4mm的导管。
72.弯曲部分133可以有利地抵靠血管壁200径向地推动导管的远端,从而实现血管的最佳切割和/或成像,如图1b所示。
73.图3a至3b示出示例性导管300的另一实施例,包括位于导管主体中的弯曲部分333,弯曲部分333抵靠血管壁推进粥样斑块切除切割器。弯曲部分333的尺寸和特征可以与弯曲部分133类似。然而,与导管100的固定凹凸弯曲部分133不同,弯曲部分333可以是用户致动凹凸。因此,参见图3a和3b,导管300可以通过内轴313(可以是用于切割器的驱动轴)和外轴311之间的伸缩互动而偏转成弯曲部分333,内轴313和外轴311在远端处固定在一起,但在近端处相对于彼此自由运动。外轴311可以包括诸如镍钛诺或不锈钢的加强构件377a、377b,加强构件377a、377b被配置为将偏转偏压为设定形状。如图3b所示,可以有两个加强构件377a、377b,这两个加强构件377a、377b可以与外轴311轴向对准并且彼此轴向且径向偏移。因此,当向外轴311施加压缩时(诸如通过拉动内轴313或单独的拉线或轴),外轴的与加强构件377a、377b相对的部分379a、379b将收缩。两个部分379a、379b的收缩将产生与图1所示的导管100类似的s形。结果,导管将偏转为凹凸或s形构型,其中,轴的远端偏移并且平行于主轴主体。应当理解的是,加强构件的其它数量和布置也是可能的,也可能形成其它凹凸形状。
74.图4a至4b示出包括用户致动弯曲部分433的粥样斑块切除导管400的另一实施例。粥样斑块切除导管400包括细长主体401、附接至细长主体401的鼻锥405,以及切割窗口407,切割窗口407被配置为暴露从中穿过的环形切割器411。此外,导管400包括弯曲部分433。弯曲部分433包括具有相反曲率(即一个向上弯曲,另一个向下弯曲)的弯曲段425、426,以形成近似s形。在一个实施例中,s形可以被配置为使得导管主体401和/或鼻锥405的远端偏离但基本上平行于导管主体401的近端。在另一实施例中,细长主体401的远端和/或鼻锥405相对于导管主体401的近端形成一定角度。
75.因此,如图4b所示,凹凸433的“s形”可以包括近侧弯曲段426和具有长度c的远侧弯曲段425。此外,在“s形”的远端可以有远侧角1,在“s形”的近端可以有近侧角2。可以调节凹凸433的长度(c、d)和角度(1、2)以实现期望的凹凸或偏移,从而获得最佳组织壁附着。例如,角度1和角度2可以在120至175度之间,诸如140至160度之间。此外,在一些实施例中,近侧段426的长度d大于远侧段425的长度c。在一个示例中,长度c是5mm,长度d是8mm,并且角度1和角度2是150度,以用于被配置为在血管中使用的直径为2.5至4mm的导管。弯曲部分433可以被配置为在导管的使用过程中呈s形,如以上关于弯曲部分333所描述的。
76.图5a至5d中示出示例性的用户致动弯曲部分533(例如用作弯曲部分433)。弯曲部分533可以包括框架(例如由镍钛诺或不锈钢制成),框架包括在弯曲段525、526内沿细长主体501的圆周被图案化的一系列周向狭缝550(例如激光切口)。弯曲段525、526的框架还可以包括从中延伸穿过的纵向脊560a、560b(在本文中也称骨干)。纵向脊560a、560b可以设置为彼此分开大约180度(即位于细长主体501的相对侧上),并且基本上平行于细长主体501的纵向中心轴线延伸。框架还可以包括将两个弯曲段525、526分开的周向脊561。每个脊560a、560b和561分别由不包括狭缝的基本上实心的材料片形成。在使用时,随着周向狭缝550在弯曲过程中彼此压缩和/或重叠,纵向脊560a、560b形成弯曲段525、526的骨干。此外,在一些实施例中,框架可以与上方和/或下方的层层压在一起,诸如薄聚合物层,如tecothane。在其它实施例中,框架不层压,以提供更大的柔性。
77.参照图5d,狭缝550可以布置为图案,该图案被配置为提供柔性同时保持细长主体的结构完整性。因此,大多数狭缝550可以具有相同长度,但彼此偏移。例如,远侧段525中的狭缝可以布置在行(1、2)和列(a、b)。每个狭缝550(除了与脊560a邻接的较短狭缝之外)可以具有与列a b a的宽度相等的长度。此外,狭缝可以彼此偏移距离a b。因此,每个列a可以包括来自行1、行2中每个行的狭缝,而列b可以包括交替狭缝(来自行1或行2)。因此,列b为装置的开缝部分提供结构完整性。段526中的狭缝可以类似地布置,但可以偏移,使得每个列c(具有来自行3、行4中每个行的狭缝)与每个列d(具有来自行3或行4的狭缝)的中心轴线对准。偏移有助于在导管弯曲时提供稳定性。
78.在一些示例中,推动或拉动导管的轴,诸如切割器驱动轴、牵引轴或牵引线,可以致动弯曲部分533。也就是说,当向近侧拉回轴时,可以将轴压缩置于外部细长主体501上,导致狭缝550彼此压缩和/或上下运动,同时脊560a、560b保持自身长度。所得到的s形(参见图4b)允许切割器(恰好位于脊460a的远侧)抵靠血管壁被向上推动。
79.图5a至5d所示的狭缝550具有重复的对称图案。然而,图案不一定是对称的。在一些实施例中,狭缝可以全部具有相同长度。在其它实施例中,一些狭缝比其它狭缝长。在一个实施例中,狭缝宽0.0016",长0.0575",与下一行狭缝偏移0.0035"。
80.狭缝度更高的导管主体区域将比狭缝度更低的区域更具柔性。在一个实施例中,狭缝可以一直延伸穿过细长导管。在其它情况下,一些狭缝可以比其它狭缝更深或更浅,这也会影响相应区域的柔性。在弯曲部分的一些变型中,可以实现柔性节段之间的偏转范围。这可以通过狭缝的不同几何图案、狭缝的不同间隔、狭缝频率、狭缝尺寸等实现。在一些情况下,可以通过在某些区域中添加各种长度的附加脊或调节脊的宽度来调节刚度程度。
81.参照图6a至6e,示出了另一示例性弯曲部分633(例如用作弯曲部分433)。弯曲部分633包括框架,框架具有通过两个纵向脊660a、660b连接在一起的三个圆环形脊661a、
661b、661c的框架。纵向脊661a、661b、661c可以彼此分开约180
°
。在一些实施例中,远侧环661a、661b、661c可以在远端具有斜面,如图6c所示,以允许鼻锥605掉落或枢转。此外,圆环形脊661a、661b、661c与纵向脊660a、660b之间的空间可以是开放的或切开的(即不包括框架材料)。在一些实施例中,框架可以利用一个或多个薄聚合物层(例如tecothane)层压至细长主体601。环661a、661b、661c中可以包括用于将机构633焊接或层压至导管的细长主体上的孔。在其它实施例中,框架可以保持不层压,以提供更大的柔性。当向机构633施加压缩时,机构633可以弯曲离开每个脊660,形成s形。例如,通过向近侧拉动驱动轴,可以向机构633施加压缩。
82.参见图9a至9f,示出了具有弯曲部分933的另一示例性粥样斑块切除导管900。与粥样斑块切除导管100类似,粥样斑块切除导管900可以包括具有弯曲部分933的导管主体901、位于导管主体901远端的可旋转环形切割器903,以及位于导管主体901远端的鼻锥905。导管主体901和/或鼻锥905还可以包括切割窗口907,切割窗口907被配置为允许切割器903从中切割穿过。导管900还可以包括驱动轴(未示出),驱动轴附接至切割器903并且被配置为在被致动时旋转切割器903。在该实施例中,鼻锥905不相对于细长主体901铰接。相反,细长主体901的衬套991直接附接至鼻锥905的近端。没有铰链可以有利地防止鼻锥905卡在血管内。在该实施例中,切割器903和驱动轴的近侧或远侧运动可以致动弯曲部分933以抵靠血管壁径向地推动切割器903(例如切割窗口907外部)。
83.弯曲部分933包括具有近侧段992a和远侧段992b的管状框架。每个段992a、992b分别包括纵向脊960a、960b。纵向脊960a、960b设置为彼此分开大约180度。具有限定榫舌元件965a、965b、965c(参见图9c)的拼图图案的周向切口947(例如激光切口)可以设置为与每个脊960a、960b相对。在一些实施例中,拼图图案包括孔975,切口947在脊960a、960b处终止于孔975。当向机构933施加压缩时,机构933可以弯曲成s形,其中,近侧段992a沿第一方向弯曲,远侧段992b沿相反的第二方向弯曲。如图9f所示,在这种弯曲过程中,脊933c不压缩,从而形成各相应弯曲的外径,并且切口947压缩在一起以形成各相应弯曲的内径。
84.在一些实施例中,榫舌元件965a、965b、965c可以具有锥形结构,该锥形结构被配置为指示弯曲部分933在两个方向上的偏转量。例如,榫舌元件965a、965b、965c可以相对于彼此锁定在弯曲位置,从而在处于弯曲或偏转位置时,保持弯曲部分933对准并且在受到扭转作用时抵抗扭转。这也可以防止弯曲部分933过度弯曲。
85.在一些实施例中,近侧段992a可以比远侧段992b长。例如,近侧段992a可以形成弯曲部分933的长度的60至90%,诸如65%至70%,而远侧段992b可以形成弯曲部分933的长度的10%至40%,诸如30%至35%。远侧段992b比近侧段992a长可以有利地帮助确保切割器903在使用过程中压靠在血管壁上,而不会朝血管的中心向后倾斜。
86.弯曲部分933可以使用任何技术联接至粥样斑块切除导管的外轴,诸如焊接、粘合剂、(一个或多个)紧固件或其组合(例如经由孔907)。
87.参见图10a至10d,在本文描述的任意实施例中,切割器1003可以包括近侧凸台1011,近侧凸台1011被配置为在向近侧拉动驱动轴1013时与弯曲部分1033上的衬套1091相互作用。弯曲部分1033可以对应于导管的柔性段。在鼻锥1005未铰接的实施例中,近侧凸台1011与衬套1091之间的相互作用可以使切割器1033运动穿过窗口1007。例如,衬套1091的远侧边缘1015可以是成角度的,使得当向近侧拉动驱动轴1013时,凸台1011沿倾斜的远侧
边缘1015(例如相对于垂直于鼻锥1005的纵向轴线的轴线倾斜)滑动,以将切割器1003移出切割器窗口1007(参见从图10a至10d的运动)。也就是说,凸台1011与边缘1015之间的相互作用可以使切割器的至少一部分延伸穿过(例如弹出)窗口1007并倾斜,使得切割器1003相对于鼻锥1005和细长主体(例如图9a和9b中的901)成一定角度。换句话说,切割器1033相对于鼻锥向近侧运动可以使切割器的至少一部分延伸穿过窗口,并且使切割器1033的纵向轴线变得不平行于鼻锥1005和细长主体的纵向轴线。在一些实施例中,当切割器1003完全展开时,切割器1033的纵向轴线相对于鼻锥1005和细长主体的纵向轴线的角度在约1度至30度(例如1
°
至30
°
、5
°
至30
°
、20
°
至30
°
、1
°
至20
°
或10
°
至20
°
)的范围内。
88.在一些实施例中,近侧凸台与衬套之间的相互作用可以附加地或替代地使弯曲部分(也称柔性段)呈现其s形。例如,参见图11a至11c,向近侧拉动驱动轴1113(为了清楚起见切开示出)可以使切割器1103与衬套1191接合,以向弯曲部分1033施加压缩并迫使弯曲部分1133弯曲(即远离纵向脊1160a、1160b中的每一个)。在一些实施例中,通过经由驱动轴向弯曲部分1133施加变化的压缩量,可以递增地和/或连续地调节弯曲量。同样,向远侧推动驱动轴1113可以使弯曲部分1133伸直。锁定机构,诸如手柄上的机构,可以将弯曲部分1133固定在期望的弯曲量。下面参照图15a至15c描述具有锁定机构的手柄的一个示例。
89.在一些实施例中,向近侧拉动切割器1003第一程度和/或第一时间,以使部分切割器1003延伸穿过窗口1007并且相对于鼻锥和细长主体倾斜(例如图10a至10d所示),并且向近侧拉动切割器1003第二程度和/或第二时间,以使柔性部分弯曲,并且根据在近侧方向上施加至驱动轴的力的大小而呈现不同程度的s形(例如图11a至11c所示)。
90.参见图12,在一些实施例中,向近侧拉动切割器1203(例如经由驱动轴)可以首先使切割器1203从切割器窗口1207中弹出。然后进一步向近侧拉动切割器1203可以使弯曲部分1233呈现期望的s形(例如以连续可调节的方式)。首先使切割器1203从窗口中弹出可以有利地确保切割器1203可以完全延伸,无论假定曲率如何。向远侧推动切割器可以使弯曲部分1233伸直为期望程度。进一步向远侧推动切割器1203可以使切割器1203缩回窗口1207内。
91.参见图13a和13b,鼻锥1305可以相对于细长主体以固定角度θ固定地联接至细长主体1301或与细长主体1301一体形成。该固定角度可以在导管中形成位于鼻锥1305和细长主体1301之间的固定弯曲部1325(也称固定曲线)。切割窗口1307可以提供接近容纳切割器1303的导管内腔的通路。切割窗口1307可以位于固定弯曲部1325处或附近。在一些实施例中,切割窗口1307相对于弯曲沿导管设置在远侧。切割器1303可以被配置为在切割器1303和驱动轴相对于导管(即鼻锥和细长主体)平移时延伸穿过切割窗口1307。例如,可以拉动驱动轴和切割器1303以向近侧运动切割器1303,并使切割器1303延伸穿过切割窗口。同样,可以推动驱动轴和切割器1303以向远侧运动切割器1303,并使切割器1303缩回导管壳体中。
92.切割窗口1307可以位于由弯曲形成的导管的凸侧1350(例如与由弯曲形成的导管的凹侧1351相对)。这种构造可以使旋转的切割器1303更好地接近导管外部的物质以进行切割。弯曲1325的角度θ可以是变化的。在一些实施例中,角度θ的范围为约1度至30度(例如1
°
至30
°
、5
°
至30
°
、20
°
至30
°
、1
°
至20
°
或10
°
至20
°
)。因此,在一些实施例中,导管的凸侧1350处的弯曲1325的角度可以在约181
°
至210
°
(例如181
°
至210
°
、186
°
至210
°
、200
°
至
210
°
、186
°
至200
°
或190
°
至200
°
)的范围内。
93.细长主体1301可以包括与上面参照图11a至11c和图12所描述的柔性段一致的柔性段1333。例如,柔性段1333可以是增量和/或连续可调节的,以呈现根据驱动轴相对于鼻锥1305和细长主体1301的近侧运动量而改变程度程度的s形。柔性段1333可以具有比鼻锥1305、弯曲1325以及在一些情况下导管的其余部分更大的柔性。
94.图13c至13e示出弯曲1325的局部特写剖视图。切割器1303可以被配置为在被动模式(如图13c所示)和主动模式(如图13d所示)之间转换。图13e示出在被动模式(图13c)和主动模式(图13d)之间的切割器1303。
95.参见图13c,当切割器1303处于被动模式时,切割器1303的切割刃1312可以相对于窗口1307位于远侧,并且容纳在鼻锥1305中,使得切割器1303的切割刃1312被完全保护,不延伸穿过切割窗口1307。在被动模式下,可以防止切割刃1312切割导管外部的物质,由此防止切割刃1312切割组织,例如血管壁。例如当导管被操纵穿过血管以到达血管内的目标位置(例如以去除诸如斑块的物质)和/或从血管抽回(例如在从血管中去除物质之后),切割器1303可以被置于被动模式。在被动模式下,切割器1303的纵向轴线(例如旋转轴线)可以基本上平行于鼻锥1305的纵向轴线。在被动模式下,可以朝鼻锥1305向远侧推动切割器1303,以例如将物质(例如斑块)封装到鼻锥1305中。
96.参见图13d,当切割器1303处于主动模式时,切割器1303的切割刃1312可以延伸穿过切割窗口1307。在导管的凸侧,切割器1303(例如切割器1303的切割刃1312)可以延伸超过外壁,使得切割器1303可以有效地接近导管外部的物质以进行切割。例如,当切割器1303延伸穿过切割窗口1307(例如在主动模式下完全延伸)时,切割器1303的至少一部分(例如切割刃1312的至少一部分)可以对应于沿弯曲的凸侧的最突出特征或点。在主动模式下,切割器1303的纵向轴线(例如旋转轴线)可以基本上平行于细长主体(例如图13a中的1301)的纵向轴线。由于切割器1303可以平行于细长主体,因此当处于主动模式时,切割器1303可以相对于鼻锥1305成角度θ(图13b)。
97.图13e示出在被动模式和主动模式之间的切割器1303。切割器1303和驱动轴可以向近侧运动(例如从鼻锥1305拉开),以将切割器1303从被动模式转换为主动模式。同样,切割器1303和驱动轴可以向远侧运动(例如朝鼻锥1305推进),以将切割器1303从主动模式转换为被动模式。在被动模式和主动模式的转换过程中,切割器1303可以被配置为与导管内的内表面相互作用,以调节切割器1303相对于鼻锥1305和细长主体1301的位置和取向。
98.例如,在从被动模式转换为主动模式期间,向近侧拉动切割器1303(例如经由驱动轴),以使切割器1303的头部1390的近侧凸台1311(也称近侧面)沿衬套1391的远侧边缘1315滑动。这种相互作用使得切割器1303相对于细长主体1301的中心轴线径向向外运动,并延伸穿过切割窗口1307(例如从窗口中弹出)。这种相互作用还导致切割器1303倾斜,使得切割器1303的纵向轴线与细长主体1301的纵向轴线对准(例如变得基本平行)。
99.在从主动模式转换为被动模式期间,向远侧推动切割器1303(例如经由驱动轴),以使沿切割器1303的轴1385的倾斜表面1370沿衬套1391的内部边缘1371滑动,使得切割器1303相对于细长主体1301的中心轴线径向向内运动并缩回导管中。当切割器1303径向向内运动时,切割器1303的轴1385接触衬套1391的内表面1383,导致切割器1303倾斜,使得切割器1303的纵向轴线与鼻锥1305的纵向轴线对准(例如变得基本平行)。
100.被动模式和主动模式之间的转换可以是连续的,其中,切割器1303逐渐平移、倾斜和径向运动。当处于被动模式和主动模式时,切割器1303和驱动轴可以自由旋转。在一些情况下,切割器1303也可以在被动模式和主动模式之间转换的同时自由旋转。
101.可以使用手柄的锁定机构将切割器1303锁定在被动模式或主动模式。下面参照图15a至15c描述锁定机构的一个示例。
102.本文描述的任何导管均可以包括诸如国际申请pct/us2017/040431号和pct/us2019/028415号中描述的成像能力,上述各申请以整体内容通过引用并入本文。例如,切割器1303可以包括用于导管内的成像传感器的腔1363,以作为成像系统的一部分发送和/或接收图像数据。切割器1303可以被配置为在被动模式、主动模式和/或在主动和被动模式转换期间收集成像数据。在一些实施例中,导管包括用作附加窗口和/或成像传感器的(一个或多个)位置标记的一个或多个开口1399。
103.图14a和14b示出示例切割器1403和衬套1491的透视图和剖视图。切割器1403可以包括位于远端的头部1490、颈部1481和位于近端的圆柱轴1485。头部1490可以包括环形切割刃1412,在一些实施例中,环形切割刃1412可以是圆齿的。颈部1481的直径可以小于头部1490和近侧轴1485的直径,以在以主动模式旋转时为切割器1403提供间隙。在一些实施例中,轴1485可以包括环形槽1487,环形槽1487与衬套1491协作以用作棘爪(下面将详细描述)。衬套1491可以固定联接至并且定位于远侧鼻锥(例如图13a中的1305)与近侧细长主体(例如图13a中的1301)之间。在一些情况下,衬套1491焊接至鼻锥和/或细长主体。衬套1491可以包括基本上平行于鼻锥的第一部分1482和基本上平行于细长主体的第二部分1486。第一部分1482和第二部分1486之间可以有中间部分1484。
104.如上所述,衬套1491的特征可以与切割器1403相互作用,以控制切割器1403在主动模式和被动模式之间的运动。当向近侧拉动切割器1403时(例如从被动模式到主动模式),切割器1403的头部1490的近侧凸台1411(也称近侧面)可以被配置为沿衬套1491的远侧边缘1415滑动。这种相互作用使得切割器1403径向向外运动,并延伸穿过切割窗口。该切割器1403变得设置在衬套1491的远侧面的凹口1416(也称密封件或压痕)内,该凹口1416为切割器1403的近侧凸台1411提供在主动模式下旋转的空间。如图14a所示,远侧边缘1415可以根据切割器1403的圆柱头部1490形成月牙形台阶。
105.参见图14b,衬套1491可以包括内部边缘1471,内部边缘1471被配置为当向远侧推动切割器(例如从主动模式进入被动模式)时,使切割器1403沿成角度表面1470滑动,从而使切割器1403径向向内运动。此外,衬套1491的内表面1483接触切割器1403的轴1485,导致切割器1403倾斜并与鼻锥对准运动并缩回鼻锥内,如上文中所描述的。
106.图14c至14f示出衬套1491的替代视图,图中示出了衬套的近侧(图14c)、远侧(图14d)和剖视图(图14e和14f)。衬套的近侧开口1441可以具有椭圆形状,从而当在主动模式和被动模式之间转换时,为切割器的轴提供间隙。衬套的内表面可以形成在被动模式下用于切割器的第一通道1443,以及在主动模式下用于切割器的第二通道1445。第一通道1443和第二通道1445可以被配置为基于切割器是处于被动模式还是主动模式而将切割器保持在不同的角度。第一通道1443可以将切割器保持为与鼻锥对准(例如平行),第二通道1445可以将切割器保持为与细长主体对准(例如平行)。第一远侧表面1415可以位于衬套远端的突出唇缘1442上。如上文所述,衬套的第一远侧表面1415可以沿切割器头部的近侧面的成
角度表面滑动,以将切割器从被动模式推进至主动模式。同样如上文所述,衬套的表面1471可以沿沿切割器轴的成角度表面滑动,以将切割器从主动模式推进至被动模式。
107.如上文所述,切割器1403可以通过棘爪机构保持在被动模式。图14g示出切割器1403的轴1485上的环形槽1487,环形槽1487在切割器和衬套的突出表面1442之间提供间隙1489(也称间隔)。当在被动模式下,环形槽1487与内表面1442对准,并且切割器的切割刃容纳在导管中时,间隙1489允许切割器更自由地旋转。这种构造可以用作将切割器1403保持在被动模式的棘爪。例如,当向更远侧朝鼻锥推动切割器时(例如在将材料填充至鼻锥期间),或者当在转换至主动模式的过程中向更近侧拉动切割器1403时,槽1487不与内表面1442对准。这导致轴1485的位于槽1487两侧的部分接触衬套1491的内表面1442,从而增加了切割器1403与衬套1491之间的阻力(摩擦)。无论是在远侧方向还是近侧方向上,可能都需要向切割器1403施加阈值平移力,以便在被动模式下释放保持切割器1403的棘爪。
108.在一些实施例中,本文描述的任何粥样斑块切除装置均可以不包括成像能力。
109.参见图7a和7b,在一些实施例中,粥样斑块切除导管700可以包括弯曲部分777,弯曲部分777包括固定凹凸段707和柔性段717。固定凹凸段707可以靠近柔性段717(如图所示)或远离柔性段717。在一些实施例中,固定凹凸段707比柔性段717长。例如,固定凹凸段707可以是5至10mm,诸如8mm,柔性段717可以是2至6mm,诸如5mm。此外,在一些实施例中(如图所示),固定凹凸段707可以仅包括单弯曲而不是双弯曲(例如形成c形而不是s形)。弯曲的角度可以是例如120
°
至175
°
,诸如130
°
至160
°
,诸如大约145
°
。柔性段717可以被配置为在使用过程中(即在容器壁作用下时)被动地弯曲,例如以形成90
°
至180
°
之间的角度,诸如110
°
至170
°
,诸如130
°
至160
°
。
110.在一些实施例中,弯曲部分777可以由层压框架制成。参见图7b,弯曲部分777可以包括具有从中延伸穿过的多个周向狭缝750a、750b的框架。柔性段717的狭缝750a可以完全围绕圆周延伸(即其中没有纵向脊),而固定凹凸段707的狭缝750b可以终止于延伸穿过固定凹凸段707的纵向脊760处。环形脊761可以将柔性段717和固定凹凸段707分开。框架可由例如镍钛诺或不锈钢制成。此外,框架的一侧或两侧可以与聚合物薄层层压,例如tecothane。在一些实施例中,只有固定凹凸段707被层压,而柔性段717保持不层压。
111.参照图7b,狭缝750a、750b可以布置为图案,该图案被配置为在柔性段717提供柔性,同时在柔性段717和固定凹凸段707中保持细长主体的结构完整性。因此,大多数狭缝750a、750b可以具有相同长度,但彼此偏移。例如,柔性段717的狭缝750a可以布置在行(1、2)和列(a、b)。每个狭缝750a具有与列a b a的宽度相等的长度。此外,狭缝可以彼此偏移距离a b。因此,每个列a可以包括来自行1、行2中每个行的狭缝,而列b可以包括交替狭缝(来自行1或行2)。因此,列b为装置的开缝部分提供结构完整性。柔性段717的狭缝750a可以提供柔性,以允许导管700在位于身体内部时,在任何方向上实现期望曲率(即狭缝可以在弯曲的外部拉开,并且在弯曲的内部压缩和/或重叠)。例如,柔性段717可以弯曲以使切割器与容器的边缘对准。
112.此外,固定凹凸段707的狭缝750b(除了与脊560a邻接的较短狭缝之外)同样可以具有与列a b a的宽度相等的长度。此外,狭缝可以彼此偏移距离a b。因此,每个列a可以包括来自行1、行2中每个行的狭缝,而列b可以包括交替狭缝(来自行1或行2)。然而,在固定凹凸段707中,脊760可以被热定形以设定凹凸的角度,从而固定凹凸。
113.本文描述的弯曲段可以附加地或替代地包括在国际申请pct/us2019/028415号('415申请)中描述的任何选择性弯曲支撑特征,该申请整体以引用方式并入本文。在一些实施例中,可以对'415申请中描述的选择性弯曲支撑特征进行修改,以采取如本文中描述的s形,诸如通过包括位于轴的相对侧上的脊。另外,在一些实施例中,可以对'415申请中描述的选择性弯曲支撑特征进行修改,以通过压缩(例如通过拉动如在本文中描述的粥样斑块切除导管的驱动轴)而不是经由张力来致动。
114.在一些实施例中,本文描述的细长导管主体的弯曲部分可以形成具有相反曲率的两个不同拐点的大致s形。在其它实施例中,弯曲部分可以包括形成大致c形的单个拐点。此外,在一些实施例中,一个或多个弯曲可以是固定的。在其它实施例中,一个或多个弯曲可以是用户致动的(例如通过拉动驱动轴或单独的牵引轴或线)。此外,本文描述的任何设计均可以包括柔性段(例如细长主体或鼻锥的),该柔性段允许导管在使用时采取期望曲率。
115.在一些实施例中,可以在粥样斑块切除术之前或期间,基于动脉的曲率和斑块形成的位置进一步调节用户调节弯曲部分的弯曲量。例如,通过张紧导管的轴,弯曲部分可以收缩并采取更尖锐的角度。替代地,当轴松弛时,弯曲部分可以松弛并采用更宽的角度。在此类示例中,偏转角可以调节例如5至20度。此外,如本文所述,形状和角度可以递增地和/或连续地调节。
116.在一些实施例中,用户调节弯曲部分可以具有预成型的弯曲或曲率,该弯曲或曲率可以在粥样斑块切除术之前或期间进一步调节。在其它实施例中,在用户致动弯曲被致动之前,弯曲部分可以是直的。
117.在本文描述的任意实施例中,鼻锥可以被配置为保持由切割器减积的组织。此外,驱动轴和切割器被配置为向远侧运动以将组织填塞至鼻锥中。
118.在一些实施例中,框架的层压可以导致层压材料发热和收缩,推入开口狭缝中并固定框架的形状(例如在预成型凹凸中)。例如,弯曲部分533和/或633可以被层压以形成固定凹凸段,该凹凸段可以通过拉动驱动轴进一步调节,或者在整个程序过程中保持固定。在其它实施例中,框架的层压可以保持狭缝打开并且没有材料,从而允许更大的灵活性。
119.虽然在本文中描述为通过压缩(例如拉动驱动轴)来致动,但本文描述的弯曲部分也可以替代地通过张力(例如推动驱动轴)来致动。
120.具有本文描述的弯曲部分的粥样斑块切除导管有利地允许粥样斑块切除切割器更容易且更接近地定位在内部动脉壁的斑块附近。也就是说,弯曲部分可以被配置为使得切割器的暴露部分(例如延伸穿过切割器窗口的区域)运动得比切割器的未暴露侧更靠近血管壁。这种定位可以使动脉粥样斑块切除术中的切割更有效。
121.本文描述的任意弯曲部分可以单独使用或与偏转鼻锥的机构组合使用。在一些实施例中,鼻锥可以通过拉动切割器驱动轴来偏转。这种偏转机构在2016年3月16日提交的题为“atherectomy catheters devices having multi-channel bushings”的美国专利申请15/072,272号(现为美国专利9,592,075号)和2016年3月21日提交的题为“atherectomy catheters and occlusion crossing devices”的美国专利申请15/076,568号(现在为美国专利9/498,247号)中有所描述,上述两个专利申请以整体内容通过引用并入。在一些实施例中,在驱动轴上施加进一步张力(即在暴露鼻锥之后)可以导致对弯曲部分施加压缩,从而使弯曲部分呈现其最终弯曲构型。具有鼻锥偏转和弯曲部分两者可以实现更好的组织
内陷,并且因此实现更好或更有效的组织切割。
122.在鼻锥不偏转的实施例中,可以优化相应的切割窗口以允许组织自动内陷到切割窗口中。此外,使鼻锥不偏转并且完全依赖弯曲部分用于组织附着可以有利地防止切割器在封装过程中脱离鼻锥。此外,单独具有弯曲部分(即没有鼻锥致动)可以有利地消除在凹凸中部手术中必须使用额外的机构的需求,诸如拉动或推动轴,由此提高了使用的便利性并且增强了图像稳定性。
123.参见图8a,在一些实施例中,鼻锥805可以是柔性的。也就是说,细长主体可以包括一个或多个弯曲部(如本文所描述的),并且鼻锥805可以提供额外的柔性,以允许导管采取期望形状。例如,鼻锥805可以包括覆盖在层压层中的重复激光切割图案。如图8a所示,该图案可以包括围绕鼻锥的圆周延伸的一系列螺旋狭缝850。在一些实施例中,激光切割图案可以由不锈钢切割而来,并且可以与诸如tecothane的聚合物层压。其它柔性鼻锥设计在2015年9月15日提交的题为“tissue collection device for catheter”的美国专利申请14/776,749号(现为美国专利申请公开2016-0008025-a1号)和2017年6月1日提交的题为“catheter device with detachable distal end”的国际专利申请pct/us2017/035510号中有所描述,上述两个专利申请以整体内容通过引用并入本文。柔性鼻锥可以用作本文中描述的细长主体弯曲部分的任何特征的附加或替代。
124.本文描述的任意导管装置可以包括用于收集导管外部的图像的成像系统。在一些实施例中,成像系统包括联接至切割器和驱动轴的侧向光学相干断层扫描(otc)系统,用于在切割器和驱动轴旋转的同时收集导管外部的图像。示例的适当成像系统在国际申请pct/us2017/040431号和pct/us2019/028415号中有所描述,上述各申请以整体内容通过引用并入本文。
125.本文描述的任意导管装置可以包括用于锁定驱动轴(内轴)相对于外轴(导管)的轴向位置的锁定组件。锁定组件可以用于例如将导管远端组件保持在弯曲或伸直状态,或者将切割器保持设置在切割器窗口的外部或内部。在一些情况下,如本文所述,锁定组件允许对导管的曲率的连续调节。在一些示例中,锁定机构位于导管装置的手柄中。图15a至15c示出导管装置的手柄1500中的滑块锁1501的示例。在图15a中,滑块锁1501位于最远侧设置的滑块按钮1503所在的远侧位置。内驱动轴包括海波管1513和驱动键1515。驱动键1515具有方形横截面形状,该形状适配在托架1520远端的对应方形开口中。这种构造形成花键接头组件1521,花键接头组件1521将驱动键1515旋转地联接至托架1520,但允许驱动键1515相对于托架1520轴向平移。因此,当托架1520由驱动电机旋转时,内驱动轴(驱动键1515和海波管1513)也旋转,而花键接头组件1521允许内驱动轴(驱动键1515和海波管1513)相对于托架1520和驱动电机轴向平移。连接件1510围绕驱动键1515设置,并且用于将滑块按钮1503平移地联接至驱动键1515,同时允许驱动键1515独立于滑块按钮1503旋转。连接件1510包括轴承1511(例如滚珠轴承),轴承1511允许驱动键1515在连接件1510内旋转。滑块按钮1503刚性地联接至连接件1510。因此,滑块按钮1503的远侧和近侧运动引起内驱动轴(驱动键1515和海波管1513)的相应远侧和近侧运动。以这种方式,脊接头1521允许滑块按钮相对于驱动轴轴向平移,同时允许驱动轴相对于包括滑块按钮在内的手柄组件的其它部分旋转。
126.弯曲盘簧1509提供抵靠滑块按钮1503的阻力,以保持滑块按钮1503的齿1505与手
柄1500的壳体内的对应齿1507啮合,从而将驱动轴的轴向位置锁定在适当位置。为了运动滑块按钮1503,用户径向向内按压滑块按钮1503以压缩盘簧1509,并使滑块按钮1503的齿1505与手柄1500的壳体内的齿1507分离,如图15b所示。当按下滑块按钮1503时,用户可以向近侧或远侧滑动滑块按钮1503。滑块按钮1503设置在手柄1500的壳体的开口内,其中,开口由远侧边缘1517和近侧边缘1519限定,远侧边缘1517和近侧边缘1519限制滑块按钮1503的远侧和近侧运动。因此,当用户按下滑块按钮1503时,用户可以使滑块按钮1503在远侧边缘1517和近侧边缘1519之间平移任何距离。当用户从滑块按钮1503释放压力时,盘簧1509向滑块按钮1503施加向后的压力,以使滑块按钮1503的齿1505与手柄1500的壳体的齿1507重新啮合,从而相对于包括外轴在内的导管组件的非平移部分重新锁定驱动轴的位置。用户可以选择驱动轴在外轴内的平移程度,只要滑块按钮1503的平移在远侧边缘1517和近侧边缘1519之间即可。远侧边缘1517和近侧边缘1519之间的距离可以根据设计要求改变。在一些示例中,远侧边缘1517和近侧边缘1519之间的距离在约0.5英寸至约1.5英寸的范围内(例如0.5至1.5英寸、0.5至1.0英寸、0.5至0.75英寸,或0.75至1.5英寸,或0.75至1.0英寸)。齿1505和1507的节距与用户针对锁定驱动轴的位置的控制精细度相关联。在一些示例中,齿1505和1507的节距为约0.030英寸或更小(例如0.030英寸、0.028英寸、0.026英寸、0.025英寸、0.023英寸、0.020英寸、0.016英寸,或0.015英寸或更小)。在一些示例中,齿1505和1507的节距在约0.020英寸至约0.040英寸(例如0.020至0.040英寸、0.025至0.030英寸,或0.025至0.040英寸)的范围内。
127.图15c示出锁定在最近侧位置的滑块锁1501,其中,滑块按钮1503抵靠手柄1500的壳体的近侧边缘1519。如图所示,滑块按钮1503的齿1505与手柄1500的壳体内的齿1507重新啮合,从而锁定驱动轴(驱动键1515和海波管1513)相对于包括外轴在内的导管系统的其它部分的轴向位置。因此,滑块锁1501允许用户在驱动轴旋转时相对于外轴运动驱动轴,并且允许用户选择驱动轴在外轴内平移以及相对于外轴锁定的程度。此外,滑块按钮1503允许驱动轴的选定轴向位置相对于外轴锁定。这些特征允许用户选择导管的柔性段的曲率范围并将柔性段锁定在选定曲率。这些特征还允许用户将切割器锁定在主动模式(在主动模式下,切割器延伸穿过切割器窗口)或被动模式(在被动模式下,切割器缩回切割器窗口中)。例如,使滑块按钮1503处于最远侧位置(例如图15a)可以等同于切割器处于被动位置并且细长主体的柔性段处于伸直或未弯曲位置。将滑块按钮1503从该最远侧位置向近侧运动一点会导致切割器弹出切割器窗口。进一步向近侧运动滑块按钮1503可以导致柔性段弯曲(例如s形弯曲),同时滑块按钮1503的增加的近侧运动导致弯曲量增加。使滑块按钮1503处于最近侧位置(例如图15c)可以等同于切割器处于主动位置并且细长主体的柔性段处于最大弯曲位置。将滑块按钮1503从该最近侧位置向远侧运动会导致柔性段的曲率减小,同时,滑块按钮1503的增加的远侧运动导致弯曲量减少。进一步向远侧运动滑块按钮1503可以导致切割器缩回切割器窗口内。
128.图15c还示出导管的盐水冲洗系统的各部分。手柄1500可以包括连接至管1503的连接器1535,以提供导管的各部分内的流体(例如盐水)。尽管未示出,但柔性管1530可以延伸(在图15c中向上延伸)至连接器(例如鲁尔连接器),该连接器允许用户直接连接流体源(例如注射器或盐水袋)。流体可以流经连接器1535到达流体壳体1537,流体壳体1537提供驱动轴与外轴之间的流体通路。流体可以用于多种目的。例如,流体可以清除导管内的空
气,为驱动轴的旋转运动提供润滑,并且可以在导管的远端用透光流体(例如盐水)置换血液,使得成像系统可以在血管内获取导管外部的图像。在该示例中,流体壳体1537包括具有第一密封件(例如o形环)的远端1532和具有第二密封件(例如o形环)的近端1534,用于防止流体进入导管手柄组件的其它区域,诸如手柄1500的滑块锁1501区域。
129.应当理解的是,本文中关于一个实施例描述的任何特征可以与本文中关于另一实施例描述的任何特征进行组合或替换。
130.在本文中,当特征或元件描述为在另一特征或元件“上”时,其可以直接位于其它特征或元件上,或者也可以存在中间特征和/或元件。相反地,当特征或元件描述为“直接位于”另一特征或元件“上”时,不存在中间特征或元件。同样应当理解的是,当特征或元件描述为“连接”、“附接”或“联接”至另一特征或元件时,其可以直接连接、附接或联接至另一特征或元件,或者可以存在中间特征或者元件。相反地,当特征或元件描述为“直接连接”、“直接附接”或“直接联接”至另一特征或元件时,不存在中间特征或元件。虽然描述或示意是针对一个实施例,但所描述或所示的特征和元件可以应用于其它实施例。本领域技术人员同样应当理解的是,提到的设置为“邻近”另一特征的结构或特征可以具有与邻近特征重叠或位于其下的部分。
131.本文所用术语的目的仅在于描述特定实施例,并非旨在限定本发明。例如,除非上下文中有明确说明,否则如本文中所使用的,单数形式“一个”、“一”和“所述”旨在同样包含复数形式。应当进一步理解的是,本技术书中使用的术语“包括”和/或“包含”表示存在所述特征、步骤、操作、元件和/或部件,但不排除存在或添加一个或多个其它特征、步骤、操作、元件、部件和/或其组合。如本文中所使用的,术语“和/或”包括列出的相关项目中的一个或多个的任意或全部组合,并且可以缩写为“/”。
132.空间相对术语,如“下”、“下方”、“更低”、“上方”、“更高”等,可以在本文中使用以便于描述附图中所示的一个元件或特征与另外元件或特征的相对关系。应当理解的是,除了图中所示的取向之外,空间相关术语将涵盖设备在使用或操作时的不同取向。例如,如果附图中的设备是翻转的,描述为在其它元件或特征“下”或“下面”的元件将随之定向为在所述其它元件或特征的“上方”。因此,示例性术语“下”可以同时涵盖上下取向。设备可以以其它方式定向(旋转90度或处于其它取向),并且本文使用的空间相关描述也应进行相应的解读。类似地,除非另有明确说明,否则本文使用的术语“向上”、“向下”、“竖直”、“水平”等的目的仅在于解释说明。
133.虽然本文中使用的“第一”、“第二”可以用于描述不同的特征/元件(包括步骤),除非上下文中另有说明,否则这些特征/元件不应被这些术语限制。这些术语可以用于一个特征/元件与另一特征/元件的区分。因此,在不偏离本发明教导的情况下,下文中讨论的第一特征/元件也可以定义为第二特征/元件,类似地,下文中讨论的第二特征/元件也可以定义为第一特征/元件。
134.在整个申请书和权利要求书中,除非上下文另有要求,否则“包括”一词及其变化,诸如“包含”和“含有”,意指可以在方法或物品中联合采用的各种部件(如包括装置和方法的组合和设备)。例如,术语“包括”应理解为暗示包含任意所述元件或步骤,但不排除任意其它元件或步骤。
135.如申请书和权利要求中所用的,包括示例中所用的,除非另有明确说明,否则所有
数字均可以解读为以“约”或“大约”一词开头,即使术语没有明确表现出来。“约”或“大约”一词可以在描述大小和/或位置时使用,以指示所述值和/或位置在值和/或位置的合理期望范围内。例如,数值可以具有所述数值(或数值范围) /-0.1%、所述数值(或数值范围) /-1%、所述数值(或数值范围) /-2%、所述数值(或数值范围) /-5%、所述数值(或数值范围) /-10%等的值。本文中列出的任意数值均旨在包括其中所包含的所有子范围。
136.虽然上文中描述了各种说明性实施例,可以在不偏离权利要求书所描述的本发明范围的情况下对各种实施例进行任意数量的改变。例如,在替代实施例中经常可以改变所描述的执行各种方法步骤的顺序,并且在其它替代实施例中,可以完全跳过一个或多个方法步骤。各种设备和系统实施例的可选特征可以包含在一些实施例中,并且不包含在其它实施例中。因此,提供上述描述主要旨在示例性目的,并且不应理解为限制权利要求书中所阐述的本发明的范围。
137.本文中的示例和说明以说明而非限定的方式示出可以实践主题的特定实施例。如前所述,可以使用并从中衍生出其它实施例,从而在不偏离本公开范围的情况下进行结构和合理替换及改变。如果实际上公开了多于一个发明或发明概念,本发明主题的此类实施例可以用术语“发明”单独或共同指代,这样仅仅是为了方便,而非旨在主动将本技术的范围限制为任意单个发明或发明概念。因此,虽然本文示出并描述了特定实施例,旨在实现相同目的的任何布置均可以替代所示的特定实施例。本公开旨在涵盖各种实施例的任意及所有适应性修改或变型。在阅读上述说明的基础上,本文中没有特别描述的上述实施例及其它实施例的组合对于本领域技术人员来说是明显的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。