1.本发明属于氧炔动火作业安保技术领域,具体涉及基于多传感器数据融合的氧炔动火作业安全综保系统。
背景技术:
2.氧气和乙炔以一定的比例混合并点燃后可以剧烈燃烧,形成氧炔焰,同时释放大量热量。氧炔焰是工业上切割和焊接金属的常用手段之一,是施工现场使用率极高的动火作业施工手段。氧炔动火作业在变电站基建、扩建、技改、大修以及缺陷处理等场合同样广泛应用。氧炔动火作业中相关的氧气瓶、乙炔瓶属于特种设备,瓶内气体易燃、易爆,危险性较大,所以作业现场的安全管控至关重要。
3.氧炔动火作业引发的生产安全事故频发,给作业人员的生命财产安全造成了具大威胁,血的教训十分惨痛。2013年3月份,某厂破碎工段机修工韩某在进行气割作业时,氧气输送管突然炸裂,事故发生后,韩某及时躲避,炸裂管道未及时关闭,造成着火,幸亏车间其他人员及时赶到,将火扑灭,才避免了事故的再次扩大,此次事故造成韩某头部、身上多处炸伤;2015年4月29日,某选矿厂浮选车间西墙摆放的乙炔瓶突然着火,所幸现场应急组织得当,及时组织人员迅速绕道西门门柱处用干粉灰火器扑灭了火焰,未造成财物损失及人员伤害;2015年7月9日,某厂停电临时抢修,机修工李某某配合电工整改铜铅分离尾矿的自动取样机,在进行气割作业中,乙炔带突然从割炬后面的连接处崩开,造成其本人整个脸部、两个小手臂、肚皮烧伤的安全事故;2016年8月16日,某公司施工人员在实施斜坡道维修支护项目过程中,采用氧炔焰切割钢拱架上部凹陷的钢板时,引燃草垫、竹架板、圆木等可燃物造成火灾,产生的大量一氧化碳等有毒有害气体,经斜坡道随风流下行进入其他作业点,造成9名当班作业人员一氧化碳中毒死亡。
4.《国家电网公司电力安全工作规程》及其他相关安全规程对氧炔动火作业有如下规定:
5.1、使用中的氧气瓶和乙炔瓶应垂直固定放置,氧气瓶和乙炔瓶的距离不得小于5m,气瓶的放置地点不准靠近热源;
6.2、氧气瓶内的压力降达到0.2mpa,不准再使用;
7.3、环境温度低于0℃时,乙炔气瓶压力不得低于0.05mpa;环境温度在0~15℃时,乙炔气瓶压力不得低于0.1mpa;环境温度在15~25℃时,乙炔气瓶压力不得低于0.2mpa;环境温度在25~40℃时,乙炔气瓶压力不得低于0.3mpa。
8.4、使用中的氧气瓶、乙炔瓶禁止暴晒,禁止放在绝缘垫上;
9.5、风力达到5级以上时禁止进行露天动火作业。
10.针对氧炔动火作业的危险性,国家电网公司特制定以上安全规定,并对变电站内氧炔动火作业制定了相对完善的组织与管理措施,这些对扼制事故的发生具有一定积极作用,但目前保障氧炔动火作业安全的技术措施仍较少。
11.国内目前对动火作业有相对完善的安全规章制度等组织性措施。例如《国家电网
公司电力安全工作规程》规定在防火重点部位或场所以及禁止明火区作业,应填用变电站一级动火工作票或二级动火工作票。动火工作票一般至少一式三份,一份由工作负责人收执、一份由动火执行人收执、一份保存在安监部门或动火部门。动火工作票的签发人不准兼任该项工作的工作负责人。
12.目前施工现场保障动火安全的技术措施相对欠缺。在作业过程中,通常没有针对氧气瓶、乙炔瓶之间距离的精确测量和实时检测技术手段;一般没有针对作业环境参数实时监测的技术手段;作业中一般用软绳将气瓶绑在构架或柱子上,无专业的防倾倒技术措施;使用中气瓶应直立,但没有检测气瓶姿态的技术手段;未采取气瓶低压状态自动闭锁管路的相关技术措施;通常采用外部火源在割枪喷口处进行近距离点火,没有非接触式的一键点火技术。
13.近年来,随着我国各领域技术的飞速发展,国内学者和从业人员在此领域进行了大量的研究和尝试,如专利号为zl2017203100180公开一种简易便携式动火作业区域隔离装置,包括防火布、扁铁、钢管、钢筋,所述扁铁焊接为一个长方体单元框架,所述长方体单元框架四个侧面焊接有分布均匀的竖立钢管,每个侧面四角焊接有钢筋,所述长方体单元框架四个侧面和底面设置有防火布,所述防火布通过细铁丝扎绑在长方体单元框架上。本实用新型旨在解决动火作业产生火花形成火灾的安全隐患问题,安全事故防范功能较为单一;又如专利号为zl2015202179603公布了一种移动式易燃易爆区域动火作业危险监测预警装置,包括锥形不锈钢结构、摄像头、声光报警器、可燃气体检测仪、液晶显示器、硬盘、电池和服务器,摄像头位于锥形不锈钢结构顶部,液晶显示器、硬盘、电池、3g传输模块设置在锥形不锈钢结构上,液晶显示器与可燃气体检测仪连接,摄像头、可燃气体检测仪与声光报警器上均设有无线传输模块的技术方案,可用于易燃易爆区域动火作业危险监测预警。该装置仅能提供监测预警功能,并不具备事故应急处理等主动防御安全事故发生的能力。
14.随着经济社会的快速发展,各行业对电力的需求日益增加,变电站基建、扩建、技改及大修等工程项目众多,氧炔动火作业在各种施工现场被广泛应用。针对氧炔动火危险性大,缺少相应保障安全的技术措施之问题,研究一种基于多传感器数据融合的氧炔动火作业安全综保系统意义重大。
技术实现要素:
15.本发明的目的在于针对现有技术中存在的问题提供一种基于多传感器数据融合的氧炔动火作业安全综保系统,该系统通过融合北斗定位、红外测距、倾角、气体含量、温度、压力等多源传感数据,采用智能控制技术手段,可对氧炔动火作业现场进行多维度安全防护,有效扼制作业现场火灾、爆炸等安全事故的发生。
16.本发明的技术方案是:
17.基于多传感器数据融合的氧炔动火作业安全综保系统,对动火作业环境参数进行实时检测,
18.至少包括环境监测单元,均匀布置在施工现场四周,通过无线方式与智能总控终端进行通信连接,用于监测作业现场氧气浓度、可燃气体浓度、有毒有害气体浓度、温度和风速环境参数并上传至智能总控终端;
19.气瓶姿态检测与测距单元,水平安装于氧气瓶和乙炔瓶气瓶瓶体上,通过无线方
式与智能总控终端进行通信连接,用于检测室外、室内施工过程中氧气瓶、乙炔瓶之间距离参数、检测气瓶倾斜角度参数,并将所检测参数上传至智能总控终端;
20.气压检测与电磁控制单元,安装于氧气瓶和乙炔瓶气瓶减压阀与机械式压力表之间,通过无线方式与智能总控终端进行通信连接,包含气压传感器和电磁阀,气压传感器用于检测气瓶内气体压力参数并上传至智能总控终端,电磁阀用于执行控制指令切断气体管路;
21.智能总控终端用于接收各单元上传的信息,经运算处理后发出各种控制指令。
22.具体的,所述的环境监测单元包含七类传感器,分别为检测氧气浓度的氧气传感器、检测可燃气体浓度的可燃气体传感器、检测有毒有害气体浓度的一氧化碳传感器、硫化氢传感器和六氟化硫传感器、检测温度和风速的温度传感器和风速传感器,所述的氧气传感器、可燃气体传感器、一氧化碳传感器、硫化氢传感器、六氟化硫传感器、温度传感器和风速传感器分别与传智能总控终端无线连接。
23.具体的,所述的气瓶姿态检测与测距单元包含北斗定位模块、红外测距模块和加速度传感器,北斗定位模块用于检测室外施工过程中氧气瓶、乙炔瓶之间距离参数,红外测距模块用于检测室内、室外施工过程中氧气瓶、乙炔瓶之间距离参数,加速度传感器用于检测氧气瓶、乙炔瓶倾斜角度参数,所检测参数上传至智能总控终端。
24.具体的,所述的智能总控终端包含总控制器、报警装置、一键点火装置、触控屏和薄膜压力传感器,总控制器用于接收各单元上传的信息,经运算处理后发出各种控制指令,报警装置用于警示作业人员停止作业,一键点火装置用于开始作业时对割枪实施非接触式安全点火,触控屏用于向总控制器输入控制参数或读取各种检测数据信息,薄膜压力传感器安装于智能化割枪上用于检测割枪是否被作业人员拿持并在未被拿持时及时闭锁氧气、乙炔管路电磁阀。
25.具体的,所述的加速度传感器为三轴加速度传感器。
26.具体的,所述的氧气瓶和乙炔瓶上分别设置带接地线的防倾倒支架和柔性气瓶外套。
27.具体的,七类所述的传感器互为异构传感器,在作业现场设置多个节点,每个节点分别布置以上七类传感器实时监测各类环境因子,所有节点的同一种传感器构成同质传感器,同质传感器融合采用自适应加权数据融合算法。
28.具体的,所述的异构传感器采用lmbp神经网络算法。
29.具体的,所述的自适应加权融合算法包括如下步骤:首先获得各个传感器的测量值;然后对获取的同类传感器数据分组;再对每组数据进行局部自适应加权融合,利用自适应加权融合算法对同类传感器数据进行融合求得最佳融合结果,其自适应融合过程就是先计算各个传感器初始测量值的方差,再计算总均方差,得到的最优权值乘以初始值即是最佳融合结果。
30.变电站内氧炔动火作业危险性大,目前保证安全的技术措施相对欠缺,针对此问题研发基于多传感器数据融合的氧炔动火作业安全综保系统,可实施氧气乙炔气瓶精准测距、监测动火作业现场环境参数、实时检测气瓶姿态及气瓶压力等信息、实施割枪非接触式安全点火等,对变电站内氧炔动火作业过程进行全方位、多维度防护,降低氧炔动火作业施工安全风险,保障作业过程中人身、电网和设备安全。
31.多传感器数据融合(multi-sensor data fusion,msdf)是一个新兴的研究领域,是针对一个系统使用多种传感器这一特定问题而展开的一种关于数据处理的研究,多传感器数据融合技术是近几年来发展起来的一门实践性和应用性较强的技术,是多学科交叉的新技术,涉及到信号处理、概率统计、信息论、模式识别、人工智能、模糊数学等理论。多传感器数据融合就是充分利用同质或异构传感器,采用计算机技术将它们在时间或空间上的冗余或互补信息依据合适的规则组合,对传感器采集到的信息合理支配和利用,以完成所需要的决策和估计而进行的信息处理过程,其基本原理就像人的大脑综合处理信息的过程一样,将各种传感器进行多层次、多空间的信息互补和优化组合处理,最终产生对观测环境的一致性解释评价或描述。在这个过程中要充分地利用多源数据进行合理支配与使用,而信息融合的最终目标则是基于各传感器获得的分离观测信息,通过对信息多级别、多方面组合导出更多有用信息。这不仅是利用了多个传感器相互协同操作的优势,而且也综合处理了其它信息源的数据来提高整个传感器系统的智能化。
32.本发明提供的系统具有的有益效果是:1.提出了北斗定位测距与红外测距数据融合思想,通过北斗定位测距与红外测距数据信息融合,二者形成了功能性优势互补,确保了室内、室外施工过程中氧气、乙炔气瓶距离均能有效准确测量;2应用了基于分组自适应加权融合算法及lmbp神经网络算法的环境监测信息融合技术,环境监测单元的同质传感器融合采用分组自适应加权融合算法,消除监测数据误差;异构传感器采用lmbp神经网络算法,减少数据处理时间。两种算法的应用使监测数据更准确,数据处理更迅速,安全隐患响应快;3使用基于三轴加速度传感器的气瓶姿态检测,通过三轴加速度传感器实时检测气瓶竖直方向倾斜角度,确保动火作业时氧气瓶与乙炔瓶处于直立状态,并采用防倾倒支架有效防止气瓶意外倾倒;4引入了基于气压传感器的管路低压闭锁技术通过气压传感器实时检测气瓶压力,压力低于规定值时及时闭锁气体管路电磁阀;5气瓶防倾倒支架设计接地引线,气瓶通过防倾倒支架的接地引线实现可靠接地,可以保证瓶体上的静电电荷随时释放,避免静电积聚到一定程度时产生静电火花引发爆炸事故;6智能总控终端设计一键点火功能,通过带有一键点火功能的智能总控终端,可对割枪实施非接触式安全点火,能够避免采用其他火源(如打火机)点火时可能发生的烧伤事故;7引入了基于薄膜压力传感器的割枪使用状态检测技术,通过装有薄膜压力传感器的智能化割枪,可切实保证割枪未被动火执行人拿持时强制熄火,避免意外火灾事故发生;8设计隔热防晒的柔性气瓶外套,通过对气瓶设计加装隔热防晒的柔性外套,避免气瓶被阳光暴晒导致瓶内压力升高,确保作业安全;9.通过多传感器信息融合技术手段,实现对氧炔动火作业现场的多维度安全防护,提高动火作业安全系数,降低施工安全风险,有效扼制作业现场火灾、爆炸等安全事故的发生,实际应用意义重大,具有显著的社会效益,与单传感器系统相比,运用多传感器数据融合技术在解决探测、跟踪和目标识别等问题方面,能够增强系统生存能力,提高整个系统的可靠性和鲁棒性,增强数据的可信度,并提高精度,扩展整个系统的时间、空间覆盖率,增加系统的实时性和信息利用率等。
33.本发明提供的氧炔动火作业安全综保系统解决了变电站内氧炔动火作业危险性大,但保证安全的技术措施相对较少的问题,可以全面保障站内氧炔动火作业施工安全,从而极大程度降低了因氧炔动火作业安全事故带来的巨大经济损失。本项目的目的是保障动火作业安全,其核心在于安全,因此具体产生的经济效益不易量化计算,但安全无价,生命
高于一切!本发明更大的意义在于其巨大的社会效益。
附图说明
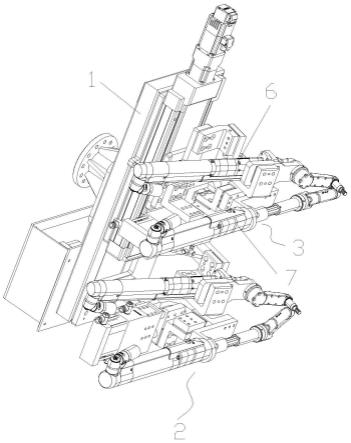
34.图1是本发明的结构示意图;
35.图2是本发明控制系统控制系统原理图;
36.图3是自适应加权数据融合算法结构示意图;
37.图4是lmbp神经网络算法流程图;
38.图5是北斗定位模块测距原理图。
具体实施方式
39.下面结合附图及具体实施方式对本发明的技术方案进行详细的说明。
40.实施例1
41.本实施例提供的基于多传感器数据融合的氧炔动火作业安全综保系统结构如图1所示,包括四个环境监测单元均匀布置在施工现场四周通过无线方式与智能总控终端进行通信连接;所述的环境监测单元包含七类传感器,分别为检测氧气浓度的氧气传感器、检测可燃气体浓度的可燃气体传感器、检测有毒有害气体浓度的一氧化碳传感器、硫化氢传感器和六氟化硫传感器、检测温度和风速的温度传感器和风速传感器,所述的氧气传感器、可燃气体传感器、一氧化碳传感器、硫化氢传感器、六氟化硫传感器、温度传感器和风速传感器分别与传智能总控终端无线连接。通过氧气传感器,能够有效检测作业现场氧含量,避免现场作业人员缺氧窒息;通过可燃气体传感器,能够有效检测乙炔等可燃气体含量,避免气体泄漏引起爆炸事故;通过一氧化碳、硫化氢、六氟化硫气体传感器,可以有效检测作业环境中有毒有害气体含量,避免作业人员中毒;通过温度传感器感知,可以保证氧气瓶、乙炔瓶附近存在热源时及时切断气路;通过风速传感器检测,确保风力大于5级时可靠闭锁气路。
42.包括两个气瓶姿态检测与测距单元,水平安装于氧气瓶和乙炔瓶气瓶瓶体上,通过无线方式与智能总控终端进行通信连接,用于检测室外、室内施工过程中氧气瓶、乙炔瓶之间距离参数、检测气瓶倾斜角度参数,并将所检测参数上传至智能总控终端;用于监测作业现场氧气浓度、可燃气体浓度、有毒有害气体浓度、温度和风速环境参数并上传至智能总控终端。
43.包括两个气压检测与电磁控制单元安装于氧气瓶和乙炔瓶气瓶减压阀与机械式压力表之间,通过无线方式与智能总控终端进行通信连接,包含气压传感器和电磁阀,气压传感器用于检测气瓶内气体压力参数并上传至智能总控终端,电磁阀用于执行控制指令切断气体管路,当氧气瓶和乙炔瓶瓶内气体用尽后,瓶内压力与大气压力平衡,空气很容易混入瓶内,氧气瓶内再次充装气体时纯度下降,乙炔瓶内再次充装气体后将形成乙炔与空气的混合气,纯度下降并且存在爆炸的严重安全风险,本系统通过气压传感器与温度传感器双源数据融合,保证氧气瓶、乙炔瓶内部压力不低于阈值下限。
44.智能总控终端用于接收各单元上传的信息,经运算处理后发出各种控制指令。所述的智能总控终端包含总控制器、报警装置、一键点火装置、触控屏和薄膜压力传感器,总控制器用于接收各单元上传的信息,经运算处理后发出各种控制指令,报警装置用于警示
作业人员停止作业,一键点火装置用于开始作业时对割枪实施非接触式安全点火,触控屏用于向总控制器输入控制参数或读取各种检测数据信息,薄膜压力传感器安装于智能化割枪上用于检测割枪是否被作业人员拿持并在未被拿持时及时闭锁氧气、乙炔管路电磁阀。通过装有薄膜压力传感器的智能化割枪,可切实保障割枪未被作业人员拿持时强制熄火;通过带有一键点火功能的智能化割枪,可避免采用其他火源(如打火机)点火时可能发生的烧伤事故;氧炔动火作业时,乙炔瓶、氧气瓶都不允许暴晒,因为暴晒会造成气瓶内压力升高,可能导致钢瓶爆炸,本系统通过加装隔热防晒的柔性气瓶外套,避免气瓶被阳光暴晒,确保作业安全。
45.所述的气瓶姿态检测与测距单元包含北斗定位模块、红外测距模块和加速度传感器,北斗定位模块用于检测室外施工过程中氧气瓶、乙炔瓶之间距离参数,红外测距模块用于检测室内、室外施工过程中氧气瓶、乙炔瓶之间距离参数,加速度传感器用于检测氧气瓶、乙炔瓶倾斜角度参数,所检测参数上传至智能总控终端。
46.所述的加速度传感器为三轴加速度传感器,三轴加速度传感器是基于重力工作的,由于加速度传感器在静止放置时受到重力作用,因此会有1g的重力加速度,利用这个性质通过测量重力加速度在x轴和y轴上的分量,即可计算出其在垂直平面上的倾斜角度。通过三轴加速度传感器对气瓶倾角的测量,可以保证动火作业时氧气瓶与乙炔瓶处于直立状态,并采用带有接地线的防倾倒支架,有效防止气瓶意外倾倒,同时可以随时释放静电电荷,避免静电积聚到一定程度产生静电火花引发爆炸。
47.所述的氧气瓶和乙炔瓶上分别设置带接地线的防倾倒支架和柔性气瓶外套。带有接地线的防倾倒支架通过支腿稳定气瓶重心,能够有效防止气瓶意外倾倒,同时可以随时释放瓶体静电电荷,避免静电积聚到一定程度产生静电火花引发爆炸。柔性气瓶外套采用隔热防晒的柔性材料制作,套装与气瓶瓶体上可避免气瓶被阳光暴晒,确保作业过程中气瓶安全。
48.实施例2
49.与实施例不同之处在于本实施例提供控制系统的具体结构及原理,原理如图2所示,室外作业时北斗定位模块与红外测距模块按采样周期同步对氧气瓶、乙炔瓶距离进行采样检测,结果取二者较小值,当结果小于5m时,总控制器输出指令闭锁c2h2管路电磁阀和o2管路电磁阀。室内作业时红外测距模块按采样周期对氧气瓶、乙炔瓶距离进行检测采样,当结果小于5m时,总控制器输出指令闭锁c2h2管路电磁阀和o2管路电磁阀;作业时三轴加速度传感器按采样周期对气瓶倾角进行采样,当倾角大于设定值时,总控制器输出指令闭锁c2h2管路电磁阀和o2管路电磁阀。
50.作业时环境监测单元的氧气传感器、可燃气体传感器、一氧化碳传感器、硫化氢传感器、六氟化硫传感器、温度传感器和风速传感器按采样周期对环境参数进行采样检测。同质传感器融合采用分组自适应加权融合算法,异构传感器采用lmbp神经网络算法,同质传感器数据融合信息的和异构传感器数据融合信息,全部由环境监测单元控制器运算处理,然后将结果无线传输至总控制器,总控制器处理后若环境参数不合格则输出报警信号或管路电磁阀闭锁信号,从而保证作业现场安全。
51.作业过程中,气压传感器按采样周期对气瓶内压力进行采样检测,当氧气瓶内的压力降达到0.2mpa,总控制器输出指令闭锁o2管路电磁阀。当环境温度低于0℃时乙炔气瓶
压力低于0.05mpa、环境温度在0~15℃时乙炔气瓶压力低于0.1mpa、环境温度在15~25℃时乙炔气瓶压力低于0.2mpa、环境温度在25~40℃时乙炔气瓶压力低于0.3mpa任一条件成立时,总控制器即刻闭锁c2h2管路电磁阀。
52.作业中,当检测到出现禁止作业的危险信号时,总控制器使能报警装置报警,动火执行人员应立即停止动火作业。开始作业时按下一键点火按钮,总控制器输出指令使一键点火装置对割枪实施非接触式安全点火。触控屏可供动火执行人向总控制器输入控制参数或读取各种检测数据信息。当薄膜压力传感器检测到割枪未被作业人员拿持时,总控制器即刻输出指令闭锁氧气、乙炔管路电磁阀,切断气路。
53.实施例3
54.本实施例提供使用的自适应加权融合算法与lmbp神经网络算法原理,结构示意图如图3所示,本发明采用氧气传感器、可燃气体传感器、一氧化碳传感器、硫化氢传感器、六氟化硫传感器、温度传感器和风速传感器对动火作业环境参数进行实时检测,7类传感器互为异构传感器。为综合评价动火作业环境,在作业现场设置多个节点,每个节点分别布置以上7类传感器实时监测各类环境因子,所有节点的同一种传感器构成同质传感器。
55.同质传感器融合采用加权数据融合的方法,在融合过程中,不存在数据的先验信息,故融合精度高,具有最优性、无偏性以及最小均方误差等优点,具有广泛的应用价值。采用自适应加权方法消除了测量差异对一致性度量的影响,有效地降低了非均匀数据干扰对估计值的影响。自适应加权融合算法结构为:首先获得各个传感器的测量值,然后对获取的同类传感器数据分组,再对每组数据进行局部自适应加权融合,利用自适应加权融合算法对同类传感器数据进行融合求得最佳融合结果。其自适应融合过程就是先计算各个传感器初始测量值的方差,再计算总均方差,得到的最优权值乘以初始值即可得最佳融合结果。
56.所述的自适应加权融合算法包括如下步骤:首先获得各个传感器的测量值;然后对获取的同类传感器数据分组;再对每组数据进行局部自适应加权融合,利用自适应加权融合算法对同类传感器数据进行融合求得最佳融合结果,其自适应融合过程就是先计算各个传感器初始测量值的方差,再计算总均方差,得到的最优权值乘以初始值即是最佳融合结果。
57.具体过程如下:假设对作业环境中某一类进行状态评估需要n个传感器,各传感器的测量值分别用a1、a2···an
表示,各测量值之间相互独立,方差用来表示,假设p1、p2···
pn为各传感器的权重值,则状态估计值满足权重满足则总均方差为
[0058][0059]
由于各测量值之间相互独立,并且都为a的无偏估计,可得
[0060]
[0061]
即可得总均方差是关于加权因子p的多元二次函数,则可知存在根据多元函数求极致理论,可求出当加权因子时,所对应的最小均方误差。则最优融合结果为
[0062][0063]
异构传感器采用lmbp神经网络算法,lmbp算法是一种标准的数值优化算法,是高斯-牛顿法与梯度下降法的结合。梯度下降算法比牛顿法易于收敛,但牛顿法的收敛速度要比梯度下降法快,利用阻尼因子进行插值,生成lm算法,其综合了两者的优点,优化后的bp神经网络可以加快收敛速度,减少数据传播时间,使传感器节点能耗降低,在系统无线传感器节点上有很好的应用效果。
[0064]
lmbp神经网络算法流程如图4所示,lmbp神经网络模型采用三层网络结构,即输入层、隐含层、输出层。前馈层和递归层的激励函数分别用purelin函数和poslin函数,训练函数为trainlm。lmbp神经网络先要根据获取数据设定阈值得到输入向量,然后利用输入向量训练lmbp神经网络模型,从而得到更新后的权重和阈值,新的权重和阈值从中心节点传输到终端节点,然后终端节点通过对输入量的判断得到动火作业环境信息。同质传感器数据融合信息的和异构传感器数据融合信息,全部由环境监测单元的控制器进行运算处理,然后将结果无线传输至智能总控终端,总控制器处理后得到预警信号或闭锁信号,从而确保动火作业现场安全。
[0065]
实施例3
[0066]
本实施例提供本发明使用的北斗定位模块测距与红外测距模块原理,如图5所示,假设a点经纬度坐标为(a1,b1),假定b点经纬度坐标为(a2,b2),地球半径为r,则根据球面余弦定理与勾股定理,ab之间距离为r*arccos[(sinb1)*(sinb2) (cosb1)*(cosb2)*cos(a1-a2)]。目前通过结合差分技术,北斗定位测距可实现厘米级精度。
[0067]
红外测距传感器的基本原理是利用红外信号遇到障碍物距离不同,反射强度也不同的原理,进行障碍物远近的检测。红外测距传感器具有一对红外信号发射与接收二极管,发射管发射特定频率的红外信号,接收管接收这种频率的红外信号,当红外的检测方向遇到障碍物时,红外信号反射回来被接收管接收,经过处理之后,通过数字传感器接口返回到控制器,控制器即可利用红外的返回信号来计算传感器与被测物之间距离。
[0068]
北斗定位测距应用于室外环境时,北斗信号不受遮挡,测距准确;高压室内环境由于受房屋遮挡,北斗信号较弱,不能有效测距,但红外测距不受影响,二者通过数据融合,优势互补。
[0069]
最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制;尽管参照较佳实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者对部分技术特征进行等同替换;而不脱离本发明技术方案的精神,其均应涵盖在本发明请求保护的技术方案范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。