1.本实用新型涉及一种掩模取放定位结构。
背景技术:
2.目前,国内外普遍使用机械手来搬运掩模,机械手将所述掩模搬运至工装内,然后通过加工设备或检测设备对所述工装内的掩模进行加工或检测,然后再通过机械手将完成加工、检测的掩模从所述工装中取走。但是,现有的工装无法精确定位所述掩模,进而导致掩模的位置精度较差,会影响加工精度和检测结果。
3.此外,机械手上需要安装一个用于抓取掩模的取料部件,现有的取料部件结构十分复杂,含有多个动作部件和驱动原件,导致取料部件的重量较重,因此增加了机械手的负载,导致机械手的刚性变差,因此机械手只能以较慢的速度带动现有的取料部件移动以搬运所述掩模,影响了效率。
技术实现要素:
4.本实用新型所要解决的技术问题是克服现有技术的缺陷,提供一种掩模取放定位结构,它能够精确定位物料以便提高物料的位置精度,还能够实现物料的取放。
5.为了解决上述技术问题,本实用新型的技术方案是:一种掩模取放定位结构,它包括固定支撑座、活动支撑座、取料部件、夹紧机构和定位机构;其中,
6.所述固定支撑座适于托住物料的前端部;
7.所述活动支撑座适于托住所述物料的后端部;
8.所述定位机构适于动作至抵住支承在所述固定支撑座和活动支撑座上的物料并用于限定所述物料在左右方向上的位置;
9.所述夹紧机构与所述活动支撑座相连并适于驱动所述活动支撑座朝向所述固定支撑座移动以将所述物料夹紧在所述固定支撑座和活动支撑座之间;
10.所述取料部件适于连接在动作机构上并在所述动作机构的带动下移动,所述取料部件适于在移动过程中托起支承在所述固定支撑座和活动支撑座上的物料以及将所述取料部件托起的物料放于所述固定支撑座和活动支撑座上。
11.进一步,所述掩模取放定位结构还包括安装座;其中,
12.所述固定支撑座固定连接在所述安装座上;
13.所述活动支撑座滑动连接在所述安装座上。
14.进一步提供一种所述夹紧机构的具体结构,所述夹紧机构包括夹紧气缸;其中,
15.所述夹紧气缸安装在所述安装座上、与所述活动支撑座相连并适于驱动所述活动支撑座滑动以将所述物料夹紧在所述固定支撑座和活动支撑座之间。
16.进一步提供一种所述定位机构的具体结构,所述定位机构包括左定位组件和右定位组件;其中,
17.所述左定位组件包括:
18.滑动连接在所述固定支撑座上的左定位块;
19.与所述左定位块相连并适于驱动所述左定位块滑动至抵住所述物料的左侧端的第一定位驱动部件;
20.所述右定位组件包括:
21.滑动连接在所述固定支撑座上的右定位块;
22.与所述右定位块相连并适于驱动所述右定位块滑动至抵住所述物料的右侧端的第二定位驱动部件。
23.进一步提供一种所述固定支撑座的具体结构,所述固定支撑座上设有至少一个适于托住所述物料的前端部的前承载部以及至少一个适于抵住所述物料的前侧部的前抵接部;
24.所述活动支撑座上设有至少一个适于托住所述物料的后端部的后承载部以及至少一个适于抵住所述物料的后侧部的后抵接部。
25.进一步,所述取料部件上设有至少一个适于托住所述物料的托举部。
26.进一步提供一种所述取料部件的具体结构,所述物料为方形结构并具有四个角部;
27.所述取料部件上设有与所述物料上的角部一一对应并适于托住对应的所述角部的托举部。
28.进一步,所述取料部件上具有左托臂和右托臂;
29.所述左托臂和所述右托臂上分别设有两个所述托举部。
30.进一步,所述取料部件上设有适于抵住所述取料部件上的物料的一端部的挡料部;
31.所述取料部件上连接有适于抵住所述物料的另一端部以将所述物料抵紧在所述挡料部上的抵紧机构。
32.进一步提供一种所述抵紧机构的具体结构,所述抵紧机构包括:
33.滑动连接在所述取料部件上的抵接块;
34.与所述抵接块相连并适于驱动所述抵接块滑动至抵紧所述物料的抵接驱动部件。
35.采用了上述技术方案后,所述动作机构可以但不限于是机械手,所述机械手适于驱动所述取料部件移动以托取所述固定支撑座和活动支撑座上的物料,所述机械手还适于驱动所述取料部件移动以将所述取料部件托取的物料放于所述固定支撑座和活动支撑座上,实现了物料的取放。
36.当所述物料支承在所述固定支撑座和所述活动支撑座上时,所述定位机构能够限定所述物料在左右方向上的位置,所述夹紧机构驱动所述活动支撑座移动进而将所述物料夹紧在所述固定支撑座和活动支撑座之间,以便限定所述物料在前后方向上的位置,进而提高了所述物料的位置精度,便于对所述物料进行加工和检测,有利于提高对所述物料的加工精度,有利于提高检测结果的准确性;其中,所述物料为掩模。
附图说明
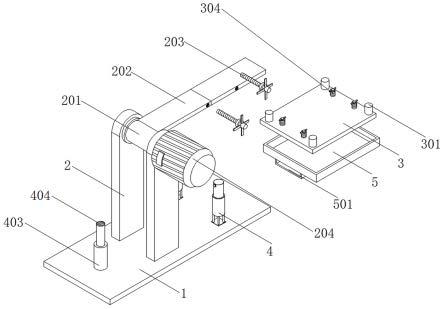
37.图1为本实用新型的掩模取放定位结构的爆炸图;
38.图2为本实用新型的掩模取放定位结构的结构示意图;
39.图3为本实用新型的掩模取放定位结构的俯视图。
具体实施方式
40.为了使本实用新型的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本实用新型作进一步详细的说明。
41.如图1~3所示,一种掩模取放定位结构,它包括固定支撑座1、活动支撑座2、取料部件3、夹紧机构和定位机构4;其中,
42.所述固定支撑座1适于托住物料5的前端部;
43.所述活动支撑座2适于托住所述物料5的后端部;
44.所述定位机构4适于动作至抵住支承在所述固定支撑座1和活动支撑座2上的物料5并用于限定所述物料5在左右方向上的位置;
45.所述夹紧机构与所述活动支撑座2相连并适于驱动所述活动支撑座2朝向所述固定支撑座1移动以将所述物料5夹紧在所述固定支撑座1和活动支撑座2之间,进而限定了所述物料5在前后方向上的位置;
46.所述取料部件3适于连接在动作机构上并在所述动作机构的带动下移动,所述取料部件3适于在移动过程中托起支承在所述固定支撑座1和活动支撑座2上的物料5以及将所述取料部件3托起的物料5放于所述固定支撑座1和活动支撑座2上;在本实施例中,所述动作机构可以但不限于是机械手,所述机械手适于驱动所述取料部件3移动以托取所述固定支撑座1和活动支撑座2上的物料5,所述机械手还适于驱动所述取料部件3移动以将所述取料部件3托取的物料5放于所述固定支撑座1和活动支撑座2上,实现了物料5的取放。
47.具体的,当所述物料5支承在所述固定支撑座1和所述活动支撑座2上时,所述定位机构4能够限定所述物料5在左右方向上的位置,所述夹紧机构驱动所述活动支撑座2移动进而将所述物料5夹紧在所述固定支撑座1和活动支撑座2之间,以便限定所述物料5在前后方向上的位置,进而提高了所述物料5的位置精度,便于对所述物料5进行加工和检测,有利于提高对所述物料5的加工精度,有利于提高检测结果的准确性。
48.在本实施例中,所述物料5可以为掩模或玻璃基板等矩形物料,所述活动支撑座2在滑动过程中始终能够托住所述物料5的后端部;其中,所述机械手的具体结构为本领域技术人员熟知的现有技术,本实施例中不作具体赘述。
49.如图2所示,所述掩模取放定位结构还可以包括安装座6;其中,
50.所述固定支撑座1固定连接在所述安装座6上;
51.所述活动支撑座2滑动连接在所述安装座6上。
52.在本实施例中,所述夹紧机构可以包括夹紧气缸;其中,
53.所述夹紧气缸安装在所述安装座6上、与所述活动支撑座2相连并适于驱动所述活动支撑座2滑动以将所述物料5夹紧在所述固定支撑座1和活动支撑座2之间。
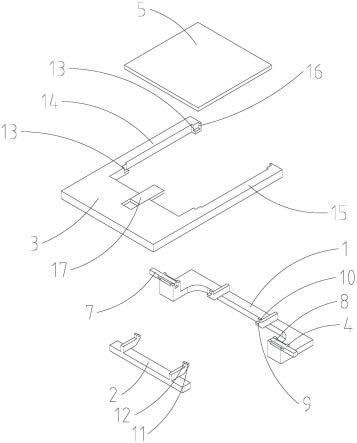
54.如图1~3所示,所述定位机构4可以包括左定位组件和右定位组件;其中,
55.所述左定位组件可以包括:
56.滑动连接在所述固定支撑座1上的左定位块7;
57.与所述左定位块7相连并适于驱动所述左定位块7滑动至抵住所述物料5的左侧端的第一定位驱动部件;
58.所述右定位组件可以包括:
59.滑动连接在所述固定支撑座1上的右定位块8;
60.与所述右定位块8相连并适于驱动所述右定位块8滑动至抵住所述物料5的右侧端的第二定位驱动部件;在本实施例中,首先所述第一定位驱动部件驱动所述左定位块7滑动至抵住所述物料5的左侧端,进而为所述物料5提供一个定位基准,然后所述第二定位驱动部件驱动所述右定位块8滑动至抵住所述物料5的右侧端,进而限定了所述物料5在左右方向上的位置。
61.如图1所示,所述固定支撑座1上设有至少一个适于托住所述物料5的前端部的前承载部9以及至少一个适于抵住所述物料5的前侧部的前抵接部10;
62.所述活动支撑座2上设有至少一个适于托住所述物料5的后端部的后承载部11以及至少一个适于抵住所述物料5的后侧部的后抵接部12;具体的,所述前承载部9和所述后承载部11用于托住所述物料5,所述前抵接部10和所述后抵接部12用于夹紧所述物料5。在本实施例中,所述前承载部9、所述后承载部11、所述前抵接部10和所述后抵接部12分别设有两个。
63.如图1所示,所述取料部件3上设有至少一个适于托住所述物料5的托举部13。
64.在本实施例中,所述物料5为方形结构并具有四个角部;所述取料部件3上设有与所述物料5上的角部一一对应并适于托住对应的所述角部的托举部13。
65.如图1~3所示,所述取料部件3上具有左托臂14和右托臂15;
66.所述左托臂14和所述右托臂15上分别设有两个所述托举部13;在本实施例中,所述取料部件3的结构很简单、重量很轻,因此能够降低所述机械手的负载,进而能够提高所述机械手的刚性,因此所述机械手能够快速移动,进而能够提高取放所述物料5的效率。
67.如图1所示,所述取料部件3上设有适于抵住所述取料部件3上的物料5的一端部的挡料部16;
68.所述取料部件3上连接有适于抵住所述物料5的另一端部以将所述物料5抵紧在所述挡料部16上的抵紧机构;这样设计的目的在于能够提高物料5在所述取料部件3上的位置精度,还能够在机械手动作过程中使所述物料5更稳定。
69.在本实施例中,所述抵紧机构可以包括:
70.滑动连接在所述取料部件3上的抵接块17;
71.与所述抵接块17相连并适于驱动所述抵接块17滑动至抵紧所述物料5的抵接驱动部件;其中,所述抵接驱动部件可以为抵接气缸,所述抵接气缸可以安装在所述取料部件3上。
72.本实用新型的工作原理如下:
73.所述动作机构可以但不限于是机械手,所述机械手适于驱动所述取料部件3移动以托取所述固定支撑座1和活动支撑座2上的物料5,所述机械手还适于驱动所述取料部件3移动以将所述取料部件3托取的物料5放于所述固定支撑座1和活动支撑座2上,实现了物料5的取放。当所述物料5支承在所述固定支撑座1和所述活动支撑座2上时,所述定位机构4能够限定所述物料5在左右方向上的位置,所述夹紧机构驱动所述活动支撑座2移动进而将所述物料5夹紧在所述固定支撑座1和活动支撑座2之间,以便限定所述物料5在前后方向上的位置,进而提高了所述物料5的位置精度,便于对所述物料5进行加工和检测,有利于提高对
所述物料5的加工精度,有利于提高检测结果的准确性;其中,所述物料5为掩模。
74.以上所述的具体实施例,对本实用新型解决的技术问题、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。