1.本实用新型集装箱液袋生产技术领域,具体而言,涉及一种用于集装箱液袋生产的破包机。
背景技术:
2.集装箱液袋是一种新型的能够储存和运输各种非危险液体货物的软体包装容器。每个容器可正好放置于标准集装箱内,其容积为14-24立方米,最多可储运24000公升液体。在非危险液体运输上可以代替昂贵的罐箱、铁桶等传统包装。运价只需支付单程运费,没有空箱返运费和清洗费用,并能有效避免货物交叉污染大量减省装卸、包装及物料管理等费用符合环保及食品包装要求,产品原材料对环境无污染适合于海运、铁路、陆运等运输方。因为液袋内部有大量的液体,所以在运输途中需要面对液体的冲击和揉折。这使得液袋膜对机械强度有非常高的要求。
3.目前大部分液袋膜都是使用3层共挤吹膜线生产。茂金属(或高碳)聚乙烯含量的大都超过50%,甚至更高。同时使用低融指的高压聚乙烯(ldpe)提高加工性能,由于高压聚乙烯对薄膜性能的影响,因此在实际生产中在保证膜泡稳定的前提下尽量少用高压,以避免高压对薄膜物理强度的影响。在一些要求高的情况下,还会在配方中,尤其是中层,添加一定的超低密度聚乙烯或者聚烯烃塑性体。
4.因此在生产液袋膜之前需要大批量的塑料聚合物,并对成袋包装的塑料聚合物需要割破包装将塑料聚合物投入料斗中,然而,现有的破包投料工序需使用人工实现,也就是人工将料垛上的料包搬下,用壁纸刀割破包装,将料投入料斗中,此过程不仅费时费力,不仅工作效率低,而且具有较高的经济成本。
技术实现要素:
5.为了弥补以上不足,本实用新型提供了一种用于集装箱液袋生产的破包机,旨在解决现有的液袋膜生产的破包投料工序需使用人工实现,也就是人工将料垛上的料包搬下,用壁纸刀割破包装,将料投入料斗中的问题。
6.本实用新型是这样实现的:
7.本实用新型提供一种用于集装箱液袋生产的破包机,包括:
8.工作台,所述工作台上设置有立柱,相对于所述立柱的一侧设置有料斗,所述料斗上安装有刀架,所述刀架上可拆卸连接有切刀;
9.横向移动机构,所述横向移动机构设置于所述立柱上,所述横向移动机构可沿x轴方向往复运动,以使抓取组件抓取料包并运送至所述料斗进行破包任务;
10.纵向移动机构,所述纵向移动机构设置于所述横向移动机构上,所述纵向移动机构可沿y轴方向往复运动,以使所述纵向移动机构根据预设程序移动使所述抓取组件按顺序抓取料包,或调整料包的位置使料包与所述切刀的位置对应进行破包;
11.升降机构,所述升降机构设置于所述纵向移动机构上,所述升降机构可沿z轴方向
往复运动,以使所述抓取组件抓取料包或破包时通过所述升降机构对其进行调整高度。
12.在本实用新型的一种实施例中,所述立柱背离所述料斗的一侧安装有储气罐。
13.在本实用新型的一种实施例中,所述横向移动机构包括第一支撑臂、第一导轨、压块、第一滑块、横行滑板、第一电机和五轴控制器,所述第一支撑臂固定连接于所述立柱的上方,所述第一支撑臂上固定连接有两个所述第一导轨,两个所述第一导轨之间设置有两个所述压块,且两个所述压块分别靠近所述第一支撑臂的两端,两个所述压块之间可拆卸连接有第一同步带,所述第一滑块三个为一组,每个所述第一导轨上均滑动连接有一组所述第一滑块,两组所述第一滑块上固定连接有所述横行滑板,所述横行滑板上安装有所述第一电机,所述第一支撑臂靠近所述横行滑板的一端设置有五轴控制器。
14.在本实用新型的一种实施例中,所述第一电机的输出端套设有同步带齿轮,所述横行滑板相对于所述同步带齿轮的一侧开设有安装孔,所述安装孔内设置有两个导轮,所述第一同步带呈“几”字形的绕设方式分别绕设于所述同步带齿轮和两个所述导轮上。
15.在本实用新型的一种实施例中,所述纵向移动机构包括第一滑动件、第二导轨、第二支撑臂、安装铝条、电机座和安装座,所述第一滑动件固定连接于所述横行滑板上,所述第一滑动件上可滑动连接有两个所述第二导轨,两个所述第二导轨上固定连接有所述第二支撑臂,所述第二支撑臂背离所述第一电机的一侧固定连接有所述安装铝条,所述安装铝条的上方固定连接有第一齿条,所述横行滑板靠近所述第一齿条的一侧固定连接有所述电机座,所述电机座呈“口”字形结构,所述电机座的上方安装有第二电机,所述第二电机的输出端套设有第一齿轮,且所述第一齿轮位于所述电机座的内部,所述第一齿轮与所述第一齿条齿合连接,两个所述第二导轨靠近所述横行滑板的端部之间固定连接有所述安装座。
16.在本实用新型的一种实施例中,所述升降机构包括第二滑动件、挡架、第三导轨、第三支撑臂、第三电机、第三滑动件、第四导轨和移动臂,所述第二滑动件固定连接于所述安装座上,所述第二滑动件的外围固定连接有呈倒u形的所述挡架,所述挡架的顶部具有一u形的第一开口部并与所述挡架下方区域形成滑动空间,所述第二滑动件可滑动连接有两个所述第三导轨,两个所述第三导轨固定连接于所述第三支撑臂靠近所述第二支撑臂的一侧,所述第三支撑臂位于所述滑动空间内,所述第三支撑臂的一侧固定连接有第二齿条,所述挡架靠近所述第二齿条的外部一侧安装有所述第三电机,所述第三电机的输出端套设有第二齿轮,且所述第二齿轮位于所述滑动空间内,所述第二齿轮与所述第二齿条齿合连接,所述第三支撑臂的另一侧设置有所述第三滑动件,所述第三支撑臂的两端均设置有深沟球轴承,两个所述深沟球轴承之间连接有第二同步带以形成椭圆形布局,以使所述第三支撑臂、所述第三滑动件位于所述第二同步带内,所述第三支撑臂位于两个所述深沟球轴承的外侧均设置有防护罩,两个所述防护罩上均开设有可供所述第二同步带运动的第二开口部,所述第三滑动件可滑动连接有两个所述第四导轨,两个所述第四导轨固定连接于所述移动臂的一侧,所述移动臂的下方固定连接有固定座。
17.在本实用新型的一种实施例中,所述第二同步带上分别固定连接有第一固定块和第二固定块,所述第一固定块与所述第二滑动件固定连接,所述第二固定块与所述移动臂相对于所述第三支撑臂的一侧固定连接。
18.在本实用新型的一种实施例中,所述第一滑动件、所述第二滑动件和所述第三滑动件均由第二滑块和底板构成,所述第二滑块三个为一组,且两组第二滑块呈对称分布于
所述底板上。
19.在本实用新型的一种实施例中,所述抓取组件设置在所述固定座的下方,所述抓取组件包括抓手基板和抖料件,所述抓手基板的底部呈对称分布有两个所述抖料件;
20.其中,所述抖料件包括圆导轨、第三滑块、抓手滑板、真空吸盘和气缸,两个所述圆导轨固定连接于所述抓手基板的底部,每个所述圆导轨均可滑动连接有两个所述第三滑块,每横向分布的两个所述第三滑块之间均固定连接有所述抓手滑板,每个所述抓手滑板的底部均设置有所述真空吸盘,两个所述圆导轨的一侧均设置有所述气缸,两个所述气缸呈反向设置,两个所述气缸均固定连接于所述抓手基板的底部,两个所述气缸的输出端均与所述抓手滑板固定连接。
21.在本实用新型的一种实施例中,所述横向滑板背离所述料斗的一侧固定连接有固定板,位于所述固定板的下方固定连接有拖链板,所述固定板和所述拖链板之间可拆卸连接有第一拖链,所述第一支撑臂背离所述料斗的一侧并位于所述第一拖链的弯曲段连接有拖链滚轮;所述气源控制器和所述第二支撑臂之间固定连接有第二拖链;所述第三支撑臂背离所述第三电机的一侧设置有第三拖链,所述第三拖链的一端通过第一连接板与所述第三支撑臂固定连接、另一端通过第二连接板与所述挡架固定连接。
22.相较于现有技术,本实用新型的有益效果是:
23.(1)通过设置的横向移动机构,在五轴控制器的控制下可沿x轴方向往复运动,实现抓取组件可持续进行抓包和破包工作,从而提高了生产效率。
24.(2)通过设置的纵向移动机构,在五轴控制器的控制下可沿y轴方向往复运动,以使纵向移动机构根据预设程序移动使抓取组件按顺序抓取料包,或调整料包的位置使料包与切刀的位置对应进行破包,从而实现精准操作。
25.(3)通过设置的升降机构,在五轴控制器的控制下可沿y轴方向往复运动,以使抓取组件抓取料包或破包时通过升降机构对其进行调整高度。
附图说明
26.为了更清楚地说明本实用新型实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
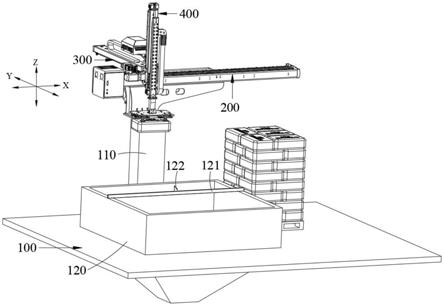
27.图1是本实用新型实施方式提供的一种用于集装箱液袋生产的破包机的立体图;
28.图2是本实用新型实施方式提供的一种用于集装箱液袋生产的破包机的另一视角示意图;
29.图3是本实用新型实施方式提供的一种用于集装箱液袋生产的破包机的横向移动机构结构示意图;
30.图4是本实用新型实施方式提供的一种用于集装箱液袋生产的破包机的横向移动机构部分结构示意图;
31.图5是本实用新型实施方式提供的一种用于集装箱液袋生产的破包机的同步带齿轮、导轮和第一同步带连接示意图;
32.图6是是本实用新型实施方式提供的一种用于集装箱液袋生产的破包机的纵向移
动机构结构示意图;
33.图7是本实用新型实施方式提供的一种用于集装箱液袋生产的破包机的纵向移动机构部分结构示意图;
34.图8是本实用新型实施方式提供的一种用于集装箱液袋生产的破包机的升降机构立体图;
35.图9是本实用新型实施方式提供的一种用于集装箱液袋生产的破包机的升降机构立体爆炸图;
36.图10是本实用新型实施方式提供的一种用于集装箱液袋生产的破包机的第一固定块、第二支撑臂和第二固定块原理示意图;
37.图11是本实用新型实施方式提供的一种用于集装箱液袋生产的破包机的抓取组件结构示意图;
38.图12是本实用新型实施方式提供的一种用于集装箱液袋生产的破包机的通信连接图。
39.附图标记说明:100、工作台;110、立柱;120、料斗;121、刀架;122、切刀;130、储气罐;200、横向移动机构;210、第一支撑臂;211、五轴控制器; 220、第一导轨;230、压块;231、第一同步带;240、第一滑块;250、横行滑板;251、安装孔;252、导轮;260、第一电机;261、同步带齿轮;270、固定板;280、拖链板;290、第一拖链;291、拖链滚轮;300、纵向移动机构;310、第一滑动件;311、第二滑块;312、底板;320、第二导轨;330、第二支撑臂; 340、安装铝条;341、第一齿条;350、电机座;351、第二电机;352、第一齿轮;360、安装座;370、气源控制器;371、第二拖链;400、升降机构;410、第二滑动件;411、第一固定块;420、挡架;421、滑动空间;430、第三导轨; 440、第三支撑臂;441、第二齿条;442、深沟球轴承;443、防护罩;4431、第二同步带;450、第三电机;451、第二齿轮;460、第三滑动件;470、第四导轨; 480、移动臂;481、第二固定块;482、固定座;483、第一连接板;484、第三拖链;485、第二连接板;490、抓取组件;491、抓手基板;492、抖料件;4921、圆导轨;4922、第三滑块;4923、抓手滑板;4924、真空吸盘;4925、气缸。
具体实施方式
40.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
41.因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
42.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
43.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽
度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
44.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
45.实施例
46.需要说明的是,以下所提到的x轴、y轴和z轴均以附图1中所示的x、 y、z坐标轴作为参考。
47.参照附图1-12所示,本发明提供一种技术方案:一种用于集装箱液袋生产的破包机,包括工作台100、横向移动机构200、纵向移动机构300和升降机构400;
48.工作台100上设置有立柱110,相对于立柱110的一侧设置有料斗120,料斗120上安装有刀架121,刀架121上可拆卸连接有切刀122;横向移动机构 200设置于立柱110上,横向移动机构200可沿x轴方向往复运动,以使抓取组件490抓取料包并运送至料斗120进行破包任务;纵向移动机构300设置于横向移动机构200上,纵向移动机构300可沿y轴方向往复运动,以使纵向移动机构300根据预设程序移动使抓取组件490按顺序抓取料包,或调整料包的位置使料包与切刀122的位置对应进行破包;升降机构400设置于纵向移动机构300 上,升降机构400可沿z轴方向往复运动,以使抓取组件490抓取料包或破包时通过升降机构400对其进行调整高度。
49.根据本实用新型的实施例中,立柱110背离料斗120的一侧安装有储气罐130。储气罐130主要为气缸4925提供气源,通过气源控制器370控制气缸 4925输出端的动力的输出。
50.参照附图1-5所示,横向移动机构200包括第一支撑臂210、第一导轨 220、压块230、第一滑块240、横行滑板250、第一电机260和五轴控制器211,第一支撑臂210固定连接于立柱110的上方,第一支撑臂210上固定连接有两个第一导轨220,两个第一导轨220之间设置有两个压块230,且两个压块230 分别靠近第一支撑臂210的两端,两个压块230之间可拆卸连接有第一同步带 231,第一滑块240三个为一组,每个第一导轨220上均滑动连接有一组第一滑块240,两组第一滑块240上固定连接有横行滑板250,横行滑板250上安装有第一电机260,第一支撑臂210靠近横行滑板250的一端设置有五轴控制器211。
51.在本实施例中,横向移动机构200沿x轴往复运动使抓取组件490进行取包和破包时,五轴控制器211控制第一电机260通电驱动同步带齿轮261旋转,通过同步带齿轮261与第一同步带231配合的作用力,使横行滑板250带动第一滑块240沿第一导轨220往复滑动完成取包和破包的任务。
52.进一步的,具体参照附图3和5所示,第一电机260的输出端套设有同步带齿轮261,横行滑板250相对于同步带齿轮261的一侧开设有安装孔251,安装孔251内设置有两个导轮252,第一同步带231呈“几”字形的绕设方式分别绕设于同步带齿轮261和两个导轮252上。
53.具体的,由于第一同步带231的两端被压块230固定在第一支撑臂210 上,第一同步带231在同步带齿轮261和两个导轮252完成“几”字形的绕设后形成比较紧绷的状态,第
一同步带231相当于给同步带齿轮261施加一定的绷紧力,因此在第一电机260带动同步带齿轮261旋转时,通过同步带齿轮261的锯齿和齿槽与第一同步带231的齿槽和锯齿配合可使横行滑板250进行直线运动。
54.参照附图1-2、6-7所示,纵向移动机构300包括第一滑动件310、第二导轨320、第二支撑臂330、安装铝条340、电机座350和安装座360,第一滑动件310固定连接于横行滑板250上,第一滑动件310上可滑动连接有两个第二导轨320,两个第二导轨320上固定连接有第二支撑臂330,第二支撑臂330背离第一电机260的一侧固定连接有安装铝条340,安装铝条340的上方固定连接有第一齿条341,横行滑板250靠近第一齿条341的一侧固定连接有电机座350,电机座350呈“口”字形结构,电机座350的上方安装有第二电机351,第二电机351的输出端套设有第一齿轮352,且第一齿轮352位于电机座350的内部,第一齿轮352与第一齿条341齿合连接,两个第二导轨320靠近横行滑板250的端部之间固定连接有安装座360。
55.在本实施例中,纵向移动机构300沿y轴运动调节抓取组件490的位置时,五轴控制器211控制第二电机351通电驱动第一齿轮352旋转,第一齿条 341通过第一齿轮352的作用,使第二导轨320带动第二支撑臂330在第一滑动件310的第二滑块311上滑动完成调节。
56.参照附图1-2、8-9所示,升降机构400包括第二滑动件410、挡架420、第三导轨430、第三支撑臂440、第三电机450、第三滑动件460、第四导轨470 和移动臂480,第二滑动件410固定连接于安装座360上,第二滑动件410的外围固定连接有呈倒u形的挡架420,挡架420的顶部具有一u形的第一开口部并与挡架420下方区域形成滑动空间421,第二滑动件410可滑动连接有两个第三导轨430,两个第三导轨430固定连接于第三支撑臂440靠近第二支撑臂330的一侧,第三支撑臂440位于滑动空间421内,第三支撑臂440的一侧固定连接有第二齿条441,挡架420靠近第二齿条441的外部一侧安装有第三电机450,第三电机450的输出端套设有第二齿轮451,且第二齿轮451位于滑动空间421内,第二齿轮451与第二齿条441齿合连接,第三支撑臂440的另一侧设置有第三滑动件460,第三支撑臂440的两端均设置有深沟球轴承442,两个深沟球轴承 442之间连接有第二同步带4431以形成椭圆形布局,以使第三支撑臂440、第三滑动件460位于第二同步带4431内,第三支撑臂440位于两个深沟球轴承442 的外侧均设置有防护罩443,两个防护罩443上均开设有可供第二同步带4431 运动的第二开口部,第三滑动件460可滑动连接有两个第四导轨470,两个第四导轨470固定连接于移动臂480的一侧,移动臂480的下方固定连接有固定座 482。
57.在本实施例中,升降机构400沿z轴调节抓取组件490的高度时,五轴控制器211控制第三电机450驱动第二齿轮451旋转,第二齿轮451通过第二齿条441的作用,使第三导轨430带动第三支撑臂440在第二滑动件410的第二滑块311上朝预设料包位置运动,同时,通过第一固定块411将第二同步带 4431固定在第二滑动件410上,第二同步带4431借势发生顺时针运动趋势,在第二同步带4431的动能传递下,使第四导轨470带动移动臂480在第三滑动件 460的第二滑块311上滑动完成调节。
58.进一步的,第二同步带4431上分别固定连接有第一固定块411和第二固定块481,第一固定块411与第二滑动件410固定连接,第二固定块481与移动臂480相对于第三支撑臂440的一侧固定连接。
59.具体的,参照附图9-10所示,由于第二同步带4431通过第一固定块411 固定在第二滑动件410上,第一固定块411作为第二同步带4431的一个固定点,当第三支撑臂440向下
移动时,第二同步带4431也随之产生顺时针的运动趋势,并且,第二固定块481与移动臂480固定,并与第三支撑臂440固定,因此,第二同步带4431也顺势带动了移动臂480向下运动。
60.第一滑动件310、第二滑动件410和第三滑动件460均由第二滑块311 和底板312构成,第二滑块311三个为一组,且两组第二滑块311呈对称分布于底板312上。
61.参照附图1-2、11所示,抓取组件490设置在固定座482的下方,抓取组件490包括抓手基板491和抖料件492,抓手基板491的底部呈对称分布有两个抖料件492;其中,抖料件492包括圆导轨4921、第三滑块4922、抓手滑板 4923、真空吸盘4924和气缸4925,两个圆导轨4921固定连接于抓手基板491 的底部,每个圆导轨4921均可滑动连接有两个第三滑块4922,每横向分布的两个第三滑块4922之间均固定连接有抓手滑板4923,每个抓手滑板4923的底部均设置有真空吸盘4924,两个圆导轨4921的一侧均设置有气缸4925,两个气缸 4925呈反向设置,两个气缸4925均固定连接于抓手基板491的底部,两个气缸 4925的输出端均与抓手滑板4923固定连接。
62.在本实施例中,气源控制器370可控制真空吸盘4924排空气体形成真空对料包进行吸附;气源控制器370控制气缸4925进气与排气使其输出端收缩或延伸,带动两个抓手滑板4923所连接的两个第三滑块4922在圆导轨4921上相向或相离运动,以使料包产生抖动,进而使料包快速排料。
63.需要说明的是,真空吸盘4924的连接以及实现原理属于常规的技术手段,因此,在此不再详细赘述。
64.可以知道的是,设备在传动的过程中,需达到比较精确的行程,由于常用的同步带在长期使用后会松动,不能达到良好的传动效果,因此第一同步带 231和第二同步带4431优选为钢丝同步带。
65.另外,横行滑板250背离料斗120的一侧固定连接有固定板270,位于固定板270的下方固定连接有拖链板280,固定板270和拖链板280之间可拆卸连接有第一拖链290,第一支撑臂210背离料斗120的一侧并位于第一拖链290 的弯曲段连接有拖链滚轮291;气源控制器370和第二支撑臂330之间固定连接有第二拖链371;第三支撑臂440背离第三电机450的一侧设置有第三拖链484,第三拖链484的一端通过第一连接板483与第三支撑臂440固定连接、另一端通过第二连接板485与挡架420固定连接。
66.在本实施例中,上述的第一拖链290、第二拖链371和第三拖链484在第一支撑臂210、第二支撑臂330和第三支撑臂440直线运动时进行撑开或卷曲,可使第一拖链290、第二拖链371和第三拖链484内部的电缆起到保护的作用,使电缆在反复发生弯曲达到了抗疲劳的作用,避免电缆被损伤,从而提高了电缆的使用寿命。
67.参照附图12所示,第一电机260、第二电机351、第三电机450和气源控制器370均与五轴控制器211通信连接,真空吸盘4924和气缸4925均与气源控制器370通信连接。
68.具体的,该一种用于集装箱液袋生产的破包机的工作原理:五轴控制器 211控制第一电机260通电驱动同步带齿轮261旋转,通过第一同步带231的两端被压块230固定在第一支撑臂210上,在同步带齿轮261与第一同步带231配合下使得第一滑块240在第一导轨220上朝料剁方向滑动;五轴控制器211控制第二电机351驱动第一齿轮352旋转,第一齿条341通过第一齿轮352的作用,使第二导轨320带动第二支撑臂330在第一滑动件310的第二滑块311上朝预设料包位置运动;五轴控制器211控制第三电机450驱动第二齿轮451旋转,
第二齿轮451通过第二齿条441的作用,使第三导轨430带动第三支撑臂 440在第二滑动件410的第二滑块311上朝预设料包位置运动,同时,通过第一固定块411将第二同步带4431固定在第二滑动件410上,第二同步带4431借势发生顺时针运动趋势,在第二同步带4431的动能传递下,使第四导轨470带动移动臂480在第三滑动件460的第二滑块311上朝预设料包位置运动,并使真空吸盘4924与料包接触,气源控制器370控制真空吸盘4924将料包吸附;利用升降机构400带动料包远离料剁,并利用横向移动机构200带动料包向料斗 120方向运动,在此过程中,利用纵向移动机调整料包需开口位置与切刀122位置对应,当料包即将抵达料斗120时,利用升降机构400带动料包朝料斗120方向运动,横向移动机构200继续带动料包向料斗120方向运动对料包进行完成开口后停止;五轴控制器211控制气缸4925的输出端收缩或延伸,带动两个抓手滑板4923所连接的两个第三滑块4922在圆导轨4921上相向或相离运动,以使料包产生抖动,进而使料包快速排料。
69.需要说明的是,第一电机260、第二电机351、第三电机450、五轴控制器211、气源控制器370和气缸4925的型号规格需根据该装置的实际规格等进行选型确定,具体选型计算方法采用本领域现有技术,故不再详细赘述。
70.第一电机260、第二电机351、第三电机450、五轴控制器211、气源控制器370和气缸4925的供电及其原理对本领域技术人员来说是清楚的,在此不予详细说明。
71.以上所述仅为本实用新型的优选实施方式而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。