1.本发明涉及一种监测安防领域,尤其涉及一种巡检机器人。
背景技术:
2.在工厂安防领域,视屏诊断技术是一项革新技术,也是当下工厂安防的典型应用,如今得到越来越广泛的应用,在大型监控系统的控制中心得到了很好的应用,通过视频的切换,同时连接数字视频,从而获取视频信号,巡检系统在工厂领域的应用,通常采用的方式是自动巡检的方式,主要过程是;通过网络给巡检系统发出命令,定期对设备,及工厂时实状况的监督,从而实现了对整个厂区设备统一监控,具体任务是完成现场设备和实施情况的数据和通信、数据传输及报警,能够自动监控和巡检,将工厂监控系统的管理水平提高到新的阶段,从而保证设备的稳定性。
技术实现要素:
3.本发明就是针对上述问题,提出一种巡检机器人包括机架、驱动组件、制动组件、张紧组件、随动轮组件、监测组件、电池组,机架为规则板材使用螺纹连接,所述驱动组件固定在机架上部,驱动组件由电池组提供动力,驱动组件的对称安装使巡检机器人运行平稳,所述制动组件固定在驱动组件一侧,制动组件由电池组件和弹簧提供,所述张紧组件固定在驱动组件底部使两侧驱动组件产生预紧力,所述随动轮组件固定在驱动组件两侧,所述监测组件固定在机架底部,所述电池组固定在机架。
4.进一步地,还包括摩擦轮、减速箱、私服电机,所述摩擦轮与减速箱连接,所述减速箱与私服电机连接,摩擦轮与伺服电机安装位置成90度以节省安装空间。
5.进一步地,还包括制动安装板、制动连接杆、活动杆、制动块、弹簧组件、第一电磁组件、第二电磁组件,所述制动连接杆上端固定在制动安装板上部,所述制动连接杆为z字型构件,所述制动连接杆一端与制动杆连接,所述制动杆一端与制动块连接,所述制动连接杆一端与弹簧组件连接,所述第一电磁组件与第二电磁组件固定在弹簧组件中。
6.进一步地,还包括张紧安装板和拉簧。
7.进一步地,还包括电机、齿轮组、皮带、伸缩杆、连接块、红外线检测仪、摄像头,所述电机连接齿轮组,所述齿轮组与皮带连接,所述伸缩杆固定在齿轮组和电机下方一端与连接块连接,所述皮带穿过伸缩杆与连接块连接,所述红外线检测仪和摄像头固定在连接块一侧。
8.进一步地,还包括烟雾传感器。
9.采用上述结构后,本发明具有如下优点:1、本发明通过驱动组件、制动组件、张紧组件、随动轮组件、监测组件、电池组,安装结构紧凑设计简单在运行过程中组件对称安装并有效节省空间。
10.2、本发明可在监测组件中使用齿轮组和伸缩杆有效调节摄像头高度,扩大检测范围,同时在连接块处可安装不同的传感器,以应对不同的工厂环境。
附图说明
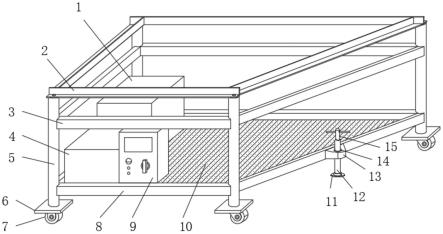
11.图1所示的是本发明的机构示意图;图2所示的是本发明驱动组件结构示意图;图3所示的是本发明制动组件结构图;图4所示的是本发明张紧组件机构示意图;图5所示的是本发明监测组件机构示意图;图6所示的是本发明使用状态示意图;其中:1、机架;100、驱动组件;101、摩擦轮;102、减速箱;103、私服电机;200、制动组件;201、制动安装板、202、制动连接杆、203、活动杆;204、制动块;205、弹簧组件、206、第一电磁组件;207、第二电磁组件;300 、张紧组件;301、拉簧;302、张紧安装板;400、随动轮组件;500、监测组件;501、电机;502、齿轮组;503、皮带;504、伸缩杆;505、烟雾传感器;506、连接块;507、摄像头;508、红外线检测仪;600、电池组件;7、轨道。
具体实施方式
12.下面结合附图和具体实施方式对本发明作进一步详细地说明。
13.具体实施例1;如图1至图6所示,机架1规则板材使用螺纹连接而成内部分成若干层其中驱动组件200由于重量最重安装在机架1机构几何中心位置保证机器人的整体稳定性,其中驱动组件200为左右对称安装,两个摩擦轮101之间间隙设置为导轨7横截面立板宽度,摩擦轮101与减速箱102连接平稳传输速度,私服电机103安装与摩擦轮101成90度便于节省空间,在对称安装的私服电机103之间安装张紧组件300,其中张紧安装板302固定在机架1上拉簧301对整个驱动组件200产生拉力最终效果使两个摩擦轮101产生预紧力贴紧导轨7,摩擦轮101安装面与制动组件200上的制动块204在相同水平高度,并与安装在机架1另两侧的随动轮组件400重点随动轮对导轨7形成三个接触点,以保证巡视机器人运行过程中保持直线运行,其中电池组件600安装在机架1底部并与驱动组件200同在机架1受力几何中心位置,提供给巡检机器人整个动力,监测组件500安装在机架1底部一侧,其安装位置与驱动组件200成对角状态,起到平衡自身重量的作用。
14.如图3所示的驱动组件200,安装在制动安装板201底部的第一电磁组件206和第二电磁组件207,在通电状态下相互吸引力克服弹簧组件205阻力贴合,带动制动连接杆202一端收缩,使制动连接杆202另一端张开向外分离,其中制动连接杆202带动活动杆203水平移动,固定在活动杆203一头的制动块204一般采用橡胶材质,因为该活动杆203使用频繁,通常采用铜杆和铜套,其中铜套固定在制动安装板201上;为了节省空间制动安装板201上安装了随动轮组件400;当第一电磁组件206和第二电磁组件207不产生吸力时弹簧组件205将制动连接杆202一端张开,使另一端靠拢使制动块204贴紧导轨7达到制动效果。
15.如图4所示张紧组件300,通过拉簧301使两组驱动组件200之间产生预紧力。
16.如图5所示监测组件500上电机501带动齿轮组件502,对皮带503的收方对摄像头507和红外线检测仪508高度位置的调节,如图摄像头507和红外线检测仪508都固定在连接块506下方,所述连接块506上可安装烟雾传感器505,连接块506处可安装伸缩杆504的活动长度范围为摄像头507摄像头的调节最大范围。
17.如图6为巡检机器人安装后运行状态,导轨7为工字钢机构,随动轮组件400上安装的若干支撑轮401在导轨上起到支撑和作用。
18.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本发明的保护范围。
技术特征:
1.一种简易巡检机器人,包括机架(1)其特征在于;还包括驱动组件(100)、制动组件(200)、张紧组件(300)、随动轮组件(400)、监测组件(500)、电池组(600),所述驱动组件(100)固定在机架(1)上部,所述制动组件(200)固定在驱动组件(100)一侧,所述张紧组件(300)固定在驱动组件(100)底部,所述随动轮组件(400)固定在驱动组件(100)两侧,所述监测组件(500)固定在机架(1)底部,所述电池组(600)固定在机架(1)。2.根据权利要求1所述简易巡检机器人,其特征在于,所述驱动组件(100)还包括摩擦轮(101)、减速箱(102)、私服电机(103),所述摩擦轮(101)、与减速箱(102)连接,所述减速箱(102)与私服电机(103)连接。3.根据权利要求1所述简易巡检机器人,其特征在于,所述制动组件(200)还包括制动安装板(201)、制动连接杆(202)、活动杆(203)、制动块(204)、弹簧组件(205)、第一电磁组件(206)、第二电磁组件(207),所述制动连接杆(202)上端固定在制动安装板(201)上部,所述制动连接杆(202)为z字型构件,所述制动连接杆(202)一端与制动杆(203)连接,所述制动杆(203)一端与制动块(204)连接,所述制动连接杆(202)一端与弹簧组件连接,所述第一电磁组件(206)与第二电磁组件(207)固定在弹簧组件(205)中。4.根据权利要求1所述简易巡检机器人,其特征在于,所述张紧组件(300)还包括张紧安装板(302)和拉簧(301)。5.根据权利要求1所述简易巡检机器人,其特征在于,所述监测组件(500)还包括电机(501)、齿轮组(502)、皮带(503)、伸缩杆(504)、连接块(506)、红外线检测仪(508)、摄像头(507),所述电机(501)连接齿轮组(502),所述齿轮组(502)与皮带(503)连接,所述伸缩杆(504)固定在齿轮组(502)和电机(501)下方一端与连接块(506)连接,所述皮带(503)穿过伸缩杆(504)与连接块(506)连接,所述红外线检测仪(508)和摄像头(507)固定在连接块(506)一侧。6.根据权利要求1或5所述简易巡检机器人,其特征在于,所述监测组件(500)上还包括烟雾传感器(505)。
技术总结
本发明涉及一种监测安防领域,尤其涉及一种巡检机器人,包括机架、驱动组件、制动组件、张紧组件、随动轮组件、监测组件、电池组,机架为规则板材使用螺纹连接,所述驱动组件固定在机架上部,驱动组件由电池组提供动力,驱动组件的对称安装使巡检机器人运行平稳,所述制动组件固定在驱动组件一侧,制动组件由电池组件和弹簧提供,所述张紧组件固定在驱动组件底部使两侧驱动组件产生预紧力,所述随动轮组件固定在驱动组件两侧,所述监测组件固定在机架底部,所述电池组固定在机架,安装结构紧凑设计简单在运行过程中组件对称安装并有效节省空间。间。间。
技术研发人员:高科 张大林 董建达
受保护的技术使用者:南昌职业大学
技术研发日:2021.01.08
技术公布日:2022/7/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。