具有组织刺穿构件的活检钳
发明人:迪帕克
·
库玛
·
沙玛和希滕德拉
·
普罗希特优先权要求
1.本公开要求提交于2020年2月3日的美国临时专利申请系列no.62/969,392的优先权;该临时专利申请的公开内容由此以引用方式并入。
技术领域
2.本公开涉及内窥镜器械,并且更具体地,涉及用于内窥镜手术的活检钳。
背景技术:
3.组织样本通常进行检查以确定病理紊乱的存在。内窥镜活检钳可结合内窥镜一起使用,以用于从人体获取某些组织样本以用于分析。通常,样本必须从身体深处的位置获得,这些位置是难以通过简单使用钳卡爪进入的(例如,来自经由曲折路径可进入的区域的组织)。在某些情况下,容易获得的组织的质量可能不能让病理学家满意,无法做出准确的诊断。此外,已知钳卡爪对于切向咬合通常为难以操纵的。
技术实现要素:
4.本公开涉及一种活检钳装置。活检钳装置包括控制构件,该控制构件从近侧端部延伸至远侧端部;轭,该轭联接至控制构件的远侧端部,该轭包括从轭的远侧端部朝远侧延伸的组织接触结构;和第一和第二卡爪,其联接至轭。第一和第二卡爪朝向打开形态偏置,在该打开形态中卡爪彼此分开以将目标组织接收在其间,并且第一和第二卡爪可移动至闭合形态,在该闭合形态中卡爪的切割边缘朝向彼此移动以从围绕组织切割目标组织部分,该第一和第二卡爪限定了其间的组织接收空间以容纳切割组织。装置还包括囊体,该囊体可滑动地接收第一和第二卡爪每一者的近侧部分和轭。第一和第二卡爪当朝近侧撤回至囊体内的第一位置时约束至闭合形态;并且第一和第二卡爪构造成使得当第一和第二卡爪移动至该第一位置远侧的第二位置时,卡爪的远侧部分从囊体的约束解放出来并且在其自然偏置力下彼此分开至打开形态;组织接触结构定位成使得当轭以及第一和第二卡爪朝远侧移动并且第一和第二卡爪移动至打开形态时,组织接触结构朝远侧延伸以接合第一和第二卡爪之间的组织部分,以在第一和第二卡爪接触与所接合的组织部分相邻的组织时再次锚定所接合的组织部分的横向移动。
5.在一个实施例中,第一和第二卡爪包括限定基本上半球形杯的凹状内表面。
6.在一个实施例中,轭包括径向延伸突出部,该径向延伸突出部接触囊体的内表面以使轭以及第一和第二卡爪在囊体内居中。
7.在一个实施例中,第一卡爪联接至轭的第一侧,该第一侧相对于囊体的纵向轴线与轭的第二侧沿直径相对,第二卡爪联接至该第二侧。
8.在一个实施例中,控制构件非可旋转地联接至轭,并且该轭以及第一和第二卡爪可旋转地接收在囊体内,使得控制线材的旋转使轭以及第一和第二卡爪在囊体内旋转。
9.在一个实施例中,装置还包括柄部,该柄部在装置的使用期间保持在装置的使用者可触及的本体之外,该柄部包括第一致动器和第二致动器,该第一致动器可操作以使控制线材相对于囊体朝近侧和朝远侧移动,该第二致动器使控制线材绕着囊体的纵向轴线旋转。
10.在一个实施例中,端部执行器具有小于4mm的长度。
11.在一个实施例中,端部执行器具有不大于3.5mm的长度。
12.在一个实施例中,装置还包括柔性细长构件,该柔性细长构件从近侧端部延伸至远侧端部,该近侧端部联接至柄部,该远侧端部联接至囊体,该细长构件将控制构件接收在其中。
13.在一个实施例中,细长构件的尺寸设定成可滑动地接收在内窥镜的工作通道内。
14.在一个实施例中,细长构件经由衬套联接至囊体。
15.在一个实施例中,囊体绕着囊体的纵向轴线旋转。
16.在一个实施例中,细长构件形成为柔性线圈。在一个实施例中,组织接合结构形成为组织穿透尖刺。
17.在一个实施例中,装置还包括囊体的远侧端部处的多个突出部,该多个突出部径向向内朝向囊体的纵向轴线延伸,以防止第一和第二卡爪朝远侧滑出囊体。
18.本公开还涉及一种用于获得组织样本的方法,该方法包括将活检钳组件的远侧部分插入至活体内的目标区域,该远侧部分包括:控制构件和端部执行器,该控制构件从近侧端部延伸至远侧端部,该端部执行器包括第一和第二卡爪,该第一和第二卡爪在打开形态(其中第一和第二卡爪彼此分开以将目标组织接收在其间)和闭合形态(其中第一和第二卡爪的切割边缘朝向彼此移动以从围绕组织切掉目标组织)之间为可移动的,该第一和第二卡爪限定了其间的组织接收空间以容纳该切掉组织;使控制构件相对于第一和第二卡爪朝远侧移动以使联接于控制构件与第一和第二卡爪之间的轭朝远侧移动,使得轭构件的远侧突出部接触目标组织,该轭联接至第一和第二卡爪使得轭的远侧移动使第一和第二卡爪移动至打开形态;和使控制构件相对于第一和第二卡爪朝近侧移动以使卡爪移动至闭合形态,使得第一和第二卡爪的切割边缘从围绕组织切断目标组织部分。
19.在一个实施例中,该方法还包括将活检钳组件插入通过内窥镜的工作通道。
20.在一个实施例中,轭以及第一和第二卡爪可滑动地接收在囊体内,并且其中轭包括多个径向突出部,这些径向突出部的尺寸设定成可滑动地接合囊体的内表面以将轭以及第一和第二卡爪维持在囊体内居中。
21.在一个实施例中,组织还包括柄部,该柄部在装置的使用期间保持在装置的使用者可触及的本体之外,该柄部包括第一致动器和第二致动器,该第一致动器可操作以使控制构件相对于囊体朝近侧和朝远侧移动,该第二致动器使控制构件绕着囊体的纵向轴线旋转。
22.在一个实施例中,该方法还包括使第二致动器在第一方向上旋转,以使活检钳组件的远侧部分相对于柄部绕着囊体的纵向轴线旋转。
附图说明
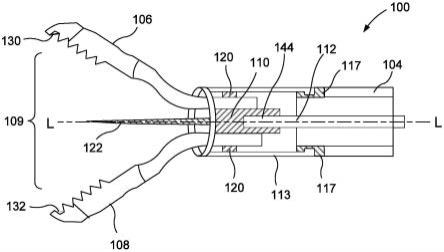
23.图1示出了根据本公开的一个示例性实施例的处于闭合形态的钳装置的端部执行
器的部分剖视图;
24.图2示出了处于打开形态的图1的端部执行器的部分剖视图;
24.图3示出了图1的端部执行器的囊体的部分透明透视图;
26.图4示出了结合图1的端部执行器使用的钳装置的柄部组件的部分剖视图;
27.图5示出了相邻于目标的处于打开形态的图1的端部执行器的部分剖视图;和
27.图6示出了抓持目标组织的图1的端部执行器的部分剖视图。
29.图7示出了图1的钳装置的部分剖视图。
具体实施方式
30.本公开以引用方式并入了提交于2019年1月22日的标题为“具有凸轮机构的活检钳(biopsy forceps with cam mechanism)”的共同待审申请美国专利申请系列no.16/253,951的全部公开内容。本公开可参考下述描述和附图来进一步理解,其中类似元件以相同附图标记来指代。本公开涉及一种用于切断并保留组织样本的内窥镜钳组件。本公开的示例性实施例描述了一种钳组件,该钳组件可推进通过柔性内窥镜(包括例如spyscope
tm
)或任何其它特别设计成和/或尺寸设定成用于与钳组件一起使用的内窥镜装置的工作通道,并且推进至组织道中。当前实施例还包括一种更紧凑钳设计以用于增加钳组件通过内窥镜装置的工作通道内的较大曲度以及沿着曲折路径(该曲折路径穿过例如活体内的器官的管腔)的通过性和可操纵性。应当指出的是,本文使用的术语“近侧”和“远侧”是指朝向装置的使用者(近侧)和远离装置的使用者(远侧)。
31.如图1-4和图7所示,根据本公开的一个示例性实施例的钳组件10包括远侧端部执行器100、近侧致动器组件102和细长构件104,细长构件104将端部执行器100连接至近侧致动器组件102。如图2所示,端部执行器100包括第一卡爪106、第二卡爪108、以及轭110,它们可滑动地接收在囊体113内。轭110联接至第一和第二卡爪106、108,并且还接收且联接至芯部线材112。囊体113的近侧端部经由衬套117联接至细长构件104。
32.如图4所示,近侧致动器组件102包括柄部114,柄部114包括近侧拇指环116和卷轴118,卷轴118相对于柄部114在纵向开槽构件115上滑动。在本实施例中,细长构件104形成为柔性线圈构件并且将控制线材112容纳于其中,控制线材112从近侧致动器组件102延伸至端部执行器100。控制线材112联接至卷轴118,并且细长构件104联接至纵向开槽构件115的远侧端部,使得当卷轴118在纵向开槽构件115上朝近侧和朝远侧移动时,控制线材112在细长构件104内朝近侧和朝远侧移动。
33.如上文所指示,轭110联接至控制线材112和卡爪106、108,而囊体经由衬套117联接至细长构件104。因此,当控制线材112经由卷轴118在纵向开槽构件115上的移动而朝近侧和朝远侧移动通过细长构件104时,轭110和卡爪106、108朝近侧和朝远侧移动通过囊体113。卡爪106、108形成使得它们朝向打开的组织接收形态偏置。因此,当卡爪106、108朝远侧移动以延伸出囊体113时,卡爪106、108彼此分开,使得目标组织可接收在其间。
34.当卡爪106、108朝近侧拉回至囊体113中时,卡爪106、108的径向外表面接触囊体113的壁并且被强制朝向组织抓持形态返回。如下文将描述,在组织抓持形态中,卡爪106、108被拉在一起以抓持、切断和保留接收在其间的组织。为有利于广泛范围的应用并到达小横截面的目标解剖区域,细长活检钳组件10可形成270cm和300cm之间,和更优选地270cm和
290cm之间的长度。
35.如在图1和2中可看出的,轭110包括两个径向突出部分120,径向突出部分120从轭110径向向外延伸以接合囊体113的内表面。当轭110和卡爪106、108在囊体113内朝近侧和朝远侧移动时,突出部分120将轭110和卡爪106、108保持居中于囊体113内。囊体113在远侧端部处具有两个突出部119,突出部119防止卡爪106、108朝远侧滑出囊体113。当卡爪106、108和轭110朝远侧移出囊体113的远侧端部时,突出部119的尺寸和形状设定成与突出部分120相接。
36.轭110还包括从其朝远侧突出的组织穿透尖刺122。该实施例的尖刺122基本上沿着囊体113的纵向轴线l延伸,使得当卡爪106、108在打开形态和组织抓持形态之间移动时,尖刺122保留基本上居中于卡爪106、108之间。因为卡爪106、108通过其自身自然偏置力来打开并且不需要连杆(例如,四杆连杆)来将卡爪106、108连接至控制线材112,所以尖刺122可沿着纵向轴线l直接地穿过,而不干扰卡爪106、108的动作。
37.图2示出了处于打开的组织接收形态的具有第一和第二卡爪106、108的端部执行器100。本实施例的第一和第二卡爪106、108通常为具有凸状外表面和凹状内表面的杯形,使得在闭合形态中,内部组织接收空间109形成于第一和第二卡爪106、108之间。第一和第二卡爪106、108的外周边边缘形成为组织切割边缘130、132,组织切割边缘130、132构造成当处于闭合形态时彼此配合。例如,在该实施例中,第一和第二卡爪106、108的周边包括互补锯齿形边缘或齿状物,使得第一卡爪106的锯齿的顶峰装配于第二卡爪108的锯齿的谷底内,反之亦然。在另一个实施例中,远侧切割边缘130、132可为平直切割边缘。
38.如图4所示,控制线材112从近侧端部142延伸至远侧端部144,近侧端部142经由联接至其的套筒143联接至卷轴118,远侧端部144联接至轭110。在该实施例中,套筒143为压接于控制线材112上的海波管。套筒143联接至旋转旋钮145,旋转旋钮145接收在卷轴118远侧的纵向开槽构件115内,使得当旋转旋钮145绕着纵向开槽构件115旋转时,控制线材112相对于柄部114旋转。套筒143可旋转地联接至卷轴118,使得当控制线材112经由旋转旋钮145旋转时,该卷轴保持在原位而不旋转。此外,如图4所看出的,细长构件104的近侧端部经由保持器147联接至柄部114的远侧端部。
39.当目标组织部分捕获于端部执行器100内,尖刺122有助于将该目标组织部分维持在相对于卡爪106、108的期望位置。具体地,如图5和6所示,当卡爪106、108从囊体朝远侧延伸并移动至打开的组织接收形态时,尖刺122在现在分开的卡爪106、108之间居中暴露。当端部执行器100朝远侧朝向目标组织推进时,尖刺122穿透目标组织,使得当卡爪106、108拉向彼此时,第一卡爪106和/或第二卡爪108在尖刺122任一侧或两侧上组织之间的接合不会将目标组织拉离中心,该拉离中心可能在获得的样本中包括非目标组织,或将一些目标组织移出中心,样本使得该目标样本组织中的一些未包括于将由卡爪106、108所抓持并切断的部分中。
40.通过维持使用者已将端部执行器直接瞄向的组织()居中于卡爪106、108之间,尖刺122确保了样本所包括的目标组织的量得以最大化。本领域的技术人员将理解,可使用其它类型的组织居中结构。例如,尖刺122可由突出结构来替代,该突出结构设计成接合目标组织并且以其它方式将目标组织维持居中于卡爪106、108之间,从而以小平坦方形形状、粘性结构、粗糙表面等来终止,只要该结构阻止了例如由卡爪106、108抵着相邻组织所施加的
横向力。
41.在一个示例性实施例中,端部执行器100具有减小长度刚性部分,该减小长度刚性部分允许该实施例的钳组件10更容易地穿越绕着急转弯半径的曲折路径。例如,通过消除与特定端部执行器相关联的连杆,本实施例的端部执行器100可具有例如3.5mm的刚性部分。这些部件以及端部执行器100的缩短允许端部执行器100更容易地穿过活体内的尖锐曲度。此外,结合尖刺122,端部执行器100的减少刚性长度减少了用以抓取期望量的目标组织所需的咬合次数。用以抓取期望量的目标组织所需的咬合次数的这种减少降低了端部执行器100至组织中的插入次数,从而降低对于周围组织的创伤。
42.返回图1,细长构件104联接至衬套117并且从其朝近侧延伸。细长构件104和衬套117可经由多种方法的任一者彼此联接,包括但不限于焊接、钎焊、粘合剂等。在一个示例性实施例中,细长构件104可由柔性的紧密缠绕的不锈钢螺旋线圈来形成,并且还可包括薄覆盖层或涂层,诸如本领域技术人员将理解的聚四氟乙烯(ptfe)层。柔性线圈104可具有例如圆形、矩形或其它横截面。如本领域技术人员将理解,其它形状的横截面可根据特定应用进行选择。ptfe减少了内窥镜的工作通道和细长构件104之间的摩擦,使得钳组件10在内窥镜内更容易地滑动。
43.在使用中,钳组件10维持于闭合形态并且插入至身体中,例如通过插入器械的工作通道,诸如内窥镜,该内窥镜可为例如spyscope ds。例如,内窥镜可插入至十二指肠,以便从胆道中取回组织样本。由于胆道的复杂解剖结构和位置,这通常要求端部执行器100相对于十二指肠的纵向轴线以锐角进行部署。端部执行器100的减小刚性长度有利于钳组件10通过这些较大曲线,从而增强了可操纵性并定位于期望位置。细长构件104连同端部执行器100一起沿着曲折路径穿过内窥镜,以进入总胆管。一旦远侧端部执行器100已根据需要定位成相邻于目标组织,则卷轴118在柄部114上朝远侧推进,从而使控制线材112和轭110朝远侧移动。轭110的这种远侧移动使卡爪106、108朝远侧移动以延伸出囊体113。
44.当卡爪106、108朝远侧移出囊体113时,这些卡爪106、108的自然偏置力使它们彼此远离移动成打开的组织接收形态。当卡爪106、108打开并且控制线材112向前推进时,尖刺122穿透目标组织,从而防止该组织横向偏离中心移动,这有助于增加目标组织所获得的样本可延伸的深度,如图5和图6所见。第一和第二卡爪106、108然后通过以下方式进行闭合:将控制线材112朝近侧撤回,朝近侧拉动轭110以及第一和第二卡爪106、108,直至卡爪106、108和囊体之间的接触将卡爪拉向彼此以抓持并切断目标组织。
45.当第一和第二卡爪106、108闭合时,沿着第一和第二卡爪106、108的轮廓的切割边缘从围绕组织切断了捕获于第一和第二卡爪106、108的组织接纳空间109中的组织,并且该切断组织样本保留于闭合卡爪106、108之间。一旦组织已收集于第一和第二卡爪106、108之间的组织接收空间109内,则钳组件10从内窥镜朝近侧回缩,并且组织从第一和第二卡爪106、108收回以用于诊断。如果诊断需要更多的组织,钳组件10可以通过内窥镜重新插入,以同样的方式进一步提取组织。
46.本领域的技术人员应当理解,对于上文所描述的实施例可在不脱离其发明构思的情况下做出改变。还应当理解,与实施例的一者相关联的结构特征和方法可并入其它实施例中。因此,应理解,本公开不限于所公开的特定实施例,而是修改也涵盖于如所附权利要求书所限定的本公开的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。