1.本实用新型涉及温室大棚智能装置技术领域,具体是一种温室大棚多功能作业平台的移动装置。
背景技术:
2.蔬菜产业属于劳动密集型产业,设施蔬菜生产中种植、修剪、施肥、施药、采摘、运输等都离不开人的参与。“机器换人”是推动蔬菜产业转型升级的重要举措,有利于蔬菜产业的持续发展。国内在温室大棚用机器人技术研究及装备研制方面,已有相关研究:一种温室大棚用无轨道自主移动平台(专利公开号:cn206156246u)提出了一种温室大棚用无轨道自主移动平台,能够实现温室内灵活的移动,并具有升降功能,可用于施药、采摘、作物整理等作业,但其不足在于需在温室内建设半结构化的路面,该路面不利于后期翻地等农业作业,对农业生产产生一定影响。用于温室大棚智能喷洒轨道式行走装置(专利公开号:cn205865353u)提供了一种用于温室大棚的智能喷洒的轨道式行走装置,该装置运行于大棚顶部的运行轨道,采用高架轨道方式不影响农业生产,但不足之处在于该装置功能单一仅用于喷药,且高度调整方式采用调节丝杠调整,效率低下。一种喷杆系统及其悬挂自走式温室大棚专用多功能变形喷雾装置(专利公开号:cn205389739u)提出了一种喷杆系统及其悬挂自走式温室大棚专用多功能变形喷雾装置,能够根据靶标作物的不同形态结构来调节装置,以提高喷雾的穿透性,该装置仅搭建一行轨道,节约空间及成本,但其不足之处在于:功能单一,虽提及多功能但仅可用于喷雾;其结构决定了喷雾仅可自上而下喷,此喷雾方式对叶面的穿透性差,不能有效的喷至叶面底部,影响喷雾效果。一种温室多功能作业车(专利公开号:cn205011337u)提供了一种带有升降装置的多功能轨道作业车,其不足之处在于该装置轨道布设于温室的过道,影响农业生产,通过控制台控制作业车前后及上下移动,智能化程度低。一种用于果园作业的自主导航喷药机器人及其控制方法(专利公开号:cn109892311a)公开了控制系统接收和处理来自卫星定位装置、惯性导航装置等发来的数据,实现机器人的驱动控制、路径学习、自主导航、喷药控制、远程通信等功能,但是该系统只能依赖于卫星定位来实现定位,在温室大棚内,卫星天线受到遮挡,覆被时温室大棚内没有卫星定位信号,且通过卫星定位成本很高。
技术实现要素:
3.本实用新型针对上述问题,提供了一种温室大棚多功能作业平台的移动装置,具有运行通畅、不妨碍田间作业的优点,且具有易操作、控制方便,位置精准的优势。
4.本实用新型解决技术问题的技术方案为:
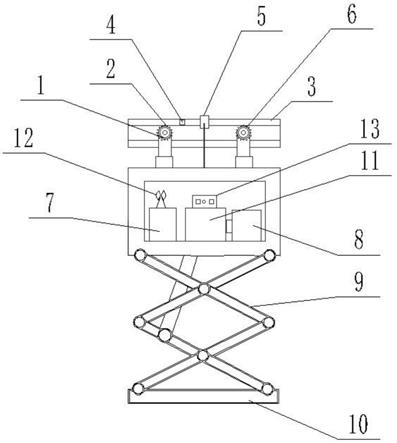
5.一种温室大棚多功能作业平台的移动装置,包括架体以及安装于架体上的电机、主动轮、挂载平台、能源系统和位置定位装置,所述的主动轮转动设置于架体的上端,所述的电机驱动主动轮转动,所述的挂载平台设置于架体的下端,所述的挂载平台上设置有作业装置,所述的能源系统为电机和位置定位装置提供电能。
6.进一步地,还包括电机控制器、控制系统,所述的控制系统分别与位置定位装置、作业装置、电机控制器连接,所述的电机控制器与电机连接。
7.进一步地,所述的挂载平台设置于升降装置上,所述的升降装置安装于架体上,所述的升降装置连接有升降控制器,所述的升降控制器与控制系统连接。
8.进一步地,还包括无线通讯系统和遥控器,所述的无线通讯系统设置于架体上,所述的无线通讯系统与控制系统连接,所述的遥控器与无线通讯系统无线连接。
9.进一步地,所述的升降装置为液压升降器。
10.进一步地,还包括从动轮,所述的从动轮转动设置于架体的上端。
11.进一步地,所述的位置定位装置包括识别设备和多个标识卡,所述的标识卡固定设置在温室大棚内。
12.
技术实现要素:
中提供的效果仅仅是实施例的效果,而不是发明所有的全部效果,上述技术方案中的一个技术方案具有如下优点或有益效果:
13.1、本实用新型通过主动轮转动设置于架体的上端,将主动轮与悬挂于棚内的运行轨道配合,通过电机提供动力可实现在棚内悬挂式运行,具有运行通畅、不妨碍棚内农事作业的优点。
14.2、本实用新型通过电机控制器和控制系统连接,控制系统可实时地获取电机的工作圈数等信息,并且可实时地控制电机的启停,可通过电机的工作圈数来辅助定位移动装置的位置,进而提高了定位的精准度和操控性。通过无线通讯系统和遥控器,可实现远程遥控操作,提高了操作的便捷性。
15.3、本实用新型通过挂载平台设置于升降装置上,利用升降装置可调整挂载平台的高度,从而调整作业装置的高度,从而适应不同的工作需求。
16.4、本实用新型通过设置从动轮,通过从动轮与主动轮均设置在运行导轨上,提高了移动装置在运行导轨上的稳定性。
17.5、通过识别设备实时地识别设置在棚内的标识卡,可实时定位本移动装置,相对比现有技术具有定位精准、耐干扰、成本低的优点。
附图说明
18.图1为本发明移动装置结构示意图;
19.图2为主动轮纵截面结构示意图;
20.图3为从动轮纵截面结构示意图;
21.图4为本发明移动装置组成部分逻辑结构图;
22.电机1,主动轮2,运行轨道3,标识卡4,识别设备5,从动轮6,控制系统7,升降控制器8,升降装置9,挂载平台10,能源系统11,无线通讯系统 12,电机控制器13。
具体实施方式
23.为了能清楚说明本方案的技术特点,下面通过具体实施方式,并结合其附图1
‑
3,对本发明进行详细阐述。下文的公开提供了许多不同的实施例或例子用来实现本发明的不同结构。为了简化本发明的公开,下文中对特定例子的部件和设置进行描述。此外,本发明可以在不同例子中重复参考数字和/或字母。这种重复是为了简化和清楚的目的,其本身不
指示所讨论各种实施例和/或设置之间的关系。应当注意,在附图中所图示的部件不一定按比例绘制。本发明省略了对公知组件和处理技术及工艺的描述以避免不必要地限制本发明。
24.一种温室大棚多功能作业平台的移动装置包括架体以及安装于架体上的电机1、主动轮2、挂载平台10、能源系统11和识别设备5,所述的主动轮2转动设置于架体的上端,所述的电机1驱动主动轮2转动,还包括从动轮6,所述的从动轮6转动设置于架体的上端,具体的,包括两个同轴设置的主动轮和两个同轴设置的从动轮,主动轮和从动轮并排设置,其中一个主动轮与电机的主动轴连接。且所述的主动轮与从动轮均滚动配合于运行轨道内,所述的运行轨道3设置于架体的上方,所述的运行轨道为工字钢轨,采用高架的方式安装于温室大棚内的种植垄间。所述的挂载平台10设置于架体的下端,所述的挂载平台10上设置有作业装置,所述的挂载平台上设置有作业装置的安装位置,具体的,所述作业装置为农用器械,如喷药器等,所述的识别设备5安装于架体的侧边,具体的,所述的识别设备为nfc读卡器,所述的运行轨道的一侧设置有多个标识卡4,通过识别设备感应标识卡来确定移动装置的位置,所述的能源系统11为电机1和位置定位装置提供电能。
25.还包括电机控制器13、控制系统7,所述的控制系统7分别与识别设备5、作业装置、电机控制器13连接,具体的,所述的作业装置的控制器与控制系统连接,所述的作业装置的启停可通过遥控器与控制系统7来控制,所述的电机控制器13与电机1连接。
26.所述的挂载平台10设置于升降装置9上,所述的升降装置9为液压升降器,所述的升降装置9安装于架体上,所述的升降装置9连接有升降控制器8,所述的升降控制器8与控制系统7连接,控制系统可通过控制升降装置来调整作业装置的高度。
27.还包括无线通讯系统12和遥控器,所述的无线通讯系统12设置于架体上,所述的无线通讯系统12与控制系统7连接,所述的遥控器与无线通讯系统12 无线连接。
28.具体的工作过程:通过遥控器遥控发出指令或通过控制系统的自动控制,电机工作从而带动移动装置在运行轨道上移动,在移动的过程中可以控制作业装置的启停以及通过升降装置9调整作业装置的高度,并且可通过识别设备5 与标识卡以及电机控制器中获取的电机转动圈数来精准定位移动装置的位置。
29.上述虽然结合附图对发明的具体实施方式进行了描述,但并非对本发明保护范围的限制,在本发明的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围以内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。