1.本发明属于车联网技术领域,尤其涉及一种车联网环境下驾驶车辆编队保持与变换的控制系统及其控制方法。
背景技术:
2.随着人工智能技术、自动驾驶技术和物联网技术的迅速发展,智能交通系统(its)成为世界交通运输领域的前沿研究内容,编队控制技术是its的一项重要内容。编队车辆接收和执行控制指令的控制装置作为智慧交通系统的子系统,是保障行车安全、扩充道路容量的关键性环节。编队车辆控制策略是指在运动过程中,各智能车既要保持队形稳定,又要适应环境约束的车路协同控制技术。合适的控制策略可以提高道路车辆密度,从而提高编队车辆的行驶效率。
3.在现有的研究中,主要集中在单一编队队形保持上,而编队队形变换较少涉及;现有的研究大多集中在编队组建完成的条件下,对于实际应用中编队的融合和拆分、单个车辆的入队和出队等研究较少。
4.针对以上不足,本发明提出线性队形变换方法,提高队形变换时编队系统的稳定性和安全性;从编队系统和流程的角度分析,对编队接收和执行控制指令的控制装置进行模块化分析和方法设计,充分考虑编队的融合和拆分、车辆入队和出队,提高编队的柔性和灵活性。
技术实现要素:
5.本发明的目的在于克服上述技术的不足,而提供一种车联网环境下驾驶车辆编队保持与变换的控制系统及其控制方法,采用线性队形变换方法,提高队形变换时编队系统的稳定性和安全性。
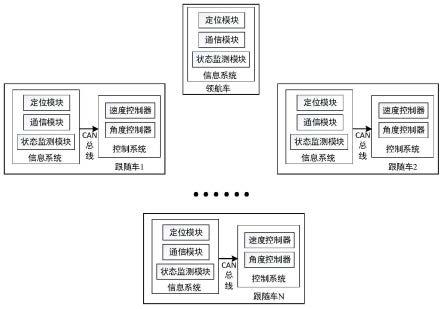
6.本发明为实现上述目的,采用以下技术方案:一种车联网环境下驾驶车辆编队保持与变换的控制系统,包括数据采集与处理装置和接收和执行控制指令的控制装置,所述数据采集与处理装置和接收和执行控制指令的控制装置与车辆物理系统有线连接,实现接收数据采集与处理装置传输的信息并执行控制指令;
7.所述数据采集与处理装置包括通信模块、定位模块和状态检测模块,用于车辆行驶所需信息数据的采集与处理;
8.通信模块用于车辆间的信息交互;
9.定位模块用于车辆自身位置信息、航向信息和速度信息的获取;
10.状态检测模块用于车辆自身横摆角速度信息和前轮转角角度信息的获取;
11.所述接收和执行控制指令的控制装置包括速度控制器和角度控制器,用于接收控制信息并执行控制指令;
12.速度控制器用于将接收的期望速度信息转为速度控制指令;
13.角度控制器:用于将接收的期望前轮转角角度信息转为角度控制指令。
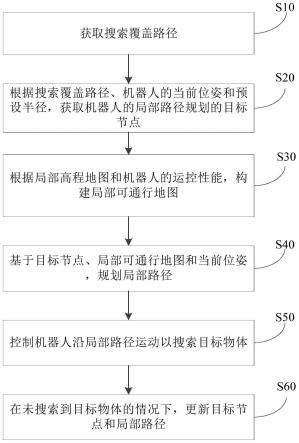
14.一种基于车联网环境下驾驶车辆编队保持与变换控制系统的控制方法:在建立领航-跟随模型的基础上,运用队形参数平滑变换方法、参考夹角时变方法及参考速度时变方法得到跟随参考行驶状态,分别基于纯跟踪方法和平滑追逐方法计算前轮转角控制量和速度控制量,使编队车辆在不同速度和队形参数下保持稳定的行驶状态;具体步骤如下:
15.步骤1)联网车辆将自身信息,包括车辆id信息、位置信息、航向信息、速度信息、横摆角速度信息、前轮转角角度信息和编队请求上报至领航车辆;
16.步骤2)领航车辆按照跟随车辆与领航车辆的距离、航向信息和编队请求,对跟随车辆按照1~n进行编号,形成编队序列信息,领航车辆周期的广播预编队信息;
17.步骤3)跟随车辆接收到领航车辆的预编队信息后,与领航车辆建立v2v加入编队,完成编队;
18.步骤4)编队完成后,领航车辆驾驶员选择队形,并将队形参数周期性下发至跟随车辆;
19.步骤5)跟随车辆接收领航车辆下发的队形参数,队形参数与上一周期的队形参数相同,不进行处理;如队形参数与上一周期的队形参数不同,则对队形参数进行平滑处理;
20.步骤6)对队形参数进行时变处理;
21.步骤7)根据领航车位置、航向、速度、横摆角速度和队形参数计算跟随车辆参考位置、参考速度;
22.步骤8)根据跟随车辆位置、速度、跟随车辆参考位置、参考速度和队形参数计算跟随车辆期望速度、期望前轮转角角度;
23.步骤9)在编队行驶过程中,编队中的跟随车辆将利用通信模块将自身编号、位置、速度、航向信息周期性上报至领航车辆;
24.步骤10)编队内车辆出入编队:在编队行驶过程中,如领航车驾驶员触发编号i跟随车辆离开编队,则编号i跟随车辆逐渐驶离编队;如有编队外车辆申请加入编队,则需向领航车辆上报入队请求,领航车辆接收到入队请求后,对编队外车辆进行编号处理后,允许编队外车辆加入编队;
25.步骤11)进入下个队形参数下发周期,从步骤4)逐步开始。
26.进一步地,步骤3)所述跟随车辆接收到领航车辆的预编队信息,具体为:
27.s31:通信模块中,dsrc使用udp接口通信;
28.s32:定位模块中,车辆使用gnss获取自身的位置信息、航向信息、速度信息。
29.进一步地,步骤4)中,所述队形参数如下:
[0030][0031]
其中,表示领航车与编号i的跟随车辆的参考距离,表示领航车与编号i的跟随车辆两者后轴中心连线与领航车纵向速度方向的参考夹角。
[0032]
进一步地,步骤5)中,所述队形参数平滑处理过程如下:
[0033]
s51:平滑后的参考距离由如下公式计算:
[0034][0035]
其中,t表示当前时刻,t0表示队形参数发生变化的时刻,即队形变换开始时刻,分别表示编号i跟随车辆队形变换前、后的参考距离,t1表示队形参数平滑处理时间;
[0036]
s52:平滑后的参考夹角由如下公式计算:
[0037][0038]
其中,公式中参数代表含义与s51公式中所代表含义一致,分别表示编号i跟随车辆队形变换前、后的参考夹角。
[0039]
进一步地,步骤6)中,所述队形参数时变处理:
[0040]
s61:时变后的参考夹角由如下公式计算:
[0041][0042]
其中,公式中参数代表含义与s51、s52公式中所代表含义一致,ω、v分别表示领航车辆的横摆角速度、速度。
[0043]
进一步地,步骤7)中,所述跟随车辆参考位置和参考速度计算过程如下:
[0044]
s71:跟随车辆参考位置由如下公式计算:
[0045][0046]
其中,公式中参数代表含义与s51、s61公式中所代表含义一致,x、y分别表示领航车辆位置横坐标、纵坐标,θ表示领航车的航向角;
[0047]
s72:跟随车辆参考速度由如下公式计算:
[0048][0049]
其中,公式中参数代表含义与s52、s61公式中所代表含义一致。
[0050]
进一步地,步骤8)中,所述跟随车辆期望速度、期望前轮转角角度计算过程如下:
[0051]
s81:跟随车辆与领航车辆的距离由如下公式计算:
[0052][0053]
其中,公式中参数代表含义与s71公式中所代表含义一致,xi、yi分别表示编号i跟随车辆的位置横坐标、纵坐标;
[0054]
s82:跟随车辆参考加速度由如下公式计算:
[0055][0056]
其中,公式中参数代表含义与s51、s72、s81公式中所代表含义一致,vi表示编号i跟随车辆的速度,t2表示跟随车辆车间距离调整时间;
[0057]
s83:跟随车辆期望速度由如下公式计算:
[0058][0059]
其中,公式中参数代表含义与s82公式中所代表含义一致;
[0060]
s84:跟随车辆期望前轮转角角度由如下公式计算:
[0061][0062]
其中,公式中参数代表含义与s71、s81、s82、s83公式中所代表含义一致,θi、li分别表示编号i跟随车辆的航向、轴距,k表示系数。
[0063]
进一步地,步骤10)中,所述编队内车辆出入编队方法如下:
[0064]
s91:编队内车辆出队时,领航车辆将编号i跟随车辆离队指令下发,编号i跟随车辆接收到离队指令后靠右驶离编队,并将离队状态上报至领航车;编号i跟随车辆完全驶离编队后,领航车辆将编号i跟随车辆出队信息下发至所有跟随车辆,并将i 1及以后的跟随车辆重新编号;出队和重新编号完成后,编号为i及以后的跟随车辆根据新的队形参数调整运动状态;
[0065]
s92:编队外车辆入队时,入队车辆向领航车辆上报入队请求,并将车辆自身位置、航向和速度信息上报至领航车辆,领航车辆检查编号列表是否有可用编号,如有可用编号,领航车辆根据车辆位置和速度,分配编号i,并插入至编号i-1和编号i 1跟随车辆之间;编号i 1及以后跟随车辆的队形参数发生改变,主动减速,等待编号i 1跟随车辆与编号i-1跟随车辆达到目标队形状态,编号i 1跟随车辆上报入队准备就绪信息至领航车辆;领航车辆向编号i跟随车辆下发队列参数,编号i跟随车辆主动改变运动状态,待达到目标队形状态后,上报入队完成信息至领航车辆;入队完成后,领航车辆主动调整车辆进入正常行驶状态。
[0066]
有益效果:本发明全面考虑了车辆数据采集与处理装置和接收与执行控制指令的控制装置在编队系统内的作用,优化了领航-跟随编队模型,解决编队形成、直线行驶、曲线行驶、队形变换和车辆出入队等编队行驶控制问题,具有普适性。能够保证编队的安全性和平稳性,缩短编队内车辆距离,提高编队的灵活性和道路的交通容量。
附图说明
[0067]
图1是编队模型示意图;
[0068]
图2是编队系统实施流程示意图;
[0069]
图3是编队模型示意图;
[0070]
图4是编队行驶中跟随车参考行驶状态存在偏离和回退现象示意图;
[0071]
图5是跟随车对参考行驶状态推算的时变队形参数示意图;
[0072]
图6是跟随车辆前轮转角控制量的示意图;
[0073]
图7是领航车和跟随车全局路径示意图;
[0074]
图8是跟随车与领航车相比路径偏差示意图。
[0075]
图中:
ⅰ‑
领航车,
ⅱ‑
跟随车。
具体实施方式
[0076]
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行详细描述。需要说明的是,在不冲突的情况下,本技术的实施方式及实施方式中的特征可以相互组合。在下面的描述中阐述了很多具体细节以便于充分理解本发明,所描述的实施方式仅仅是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。
[0077]
在本发明的各实施例中,为了便于描述而非限制本发明,本发明专利申请说明书以及权利要求书中使用的术语"连接"并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。"上"、"下"、"下方"、"左"、"右"等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也相应地改变。
[0078]
详见附图1,本实施例提供了一种车联网环境下驾驶车辆编队保持与变换的控制系统,包括数据采集与处理装置和接收和执行控制指令的控制装置,所述数据采集与处理装置和接收和执行控制指令的控制装置与车辆物理系统有线连接,接收数据采集与处理装置传输的信息并执行控制指令;
[0079]
所述数据采集与处理装置包括通信模块、定位模块和状态检测模块,所述数据采集与处理装置用于车辆行驶所需信息数据的采集与处理;
[0080]
通信模块用于车辆间的信息交互;
[0081]
定位模块用于车辆自身位置信息、航向信息和速度信息的获取;
[0082]
状态检测模块用于车辆自身横摆角速度信息和前轮转角角度信息的获取;
[0083]
所述接收和执行控制指令的控制装置包括速度控制器和角度控制器,所述接收和执行控制指令的控制装置用于接收控制信息并执行控制指令;
[0084]
速度控制器用于将接收的期望速度信息转为速度控制指令;
[0085]
角度控制器:用于将接收的期望前轮转角角度信息转为角度控制指令。
[0086]
基于编队车辆保持与变换行驶状态的接收和执行控制指令的控制装置的控制方法:在建立领航-跟随模型的基础上,运用队形参数平滑变换方法、参考夹角时变方法及参考速度时变方法得到跟随车参考行驶状态,分别基于纯跟踪方法和平滑追逐方法计算前轮转角控制量和速度控制量,使编队车辆在不同速度和队形参数下保持稳定的行驶状态,编队系统实施流程如图2所示。
[0087]
本发明具体实施步骤如下:
[0088]
步骤1)联网车辆将自身信息,包括车辆id信息、位置信息、航向信息、速度信息、横
摆角速度信息、前轮转角角度信息和编队请求上报至领航车辆;
[0089]
步骤2)领航车辆按照跟随车辆与领航车辆的距离、航向信息和编队请求,对跟随车辆按照1~n进行编号,形成编队序列信息,领航车辆周期的广播预编队信息;
[0090]
步骤3)跟随车辆接收到领航车辆的预编队信息后,与领航车辆建立v2v加入编队,完成编队;
[0091]
步骤4)编队完成后,领航车辆驾驶员选择队形,并将队形参数周期性下发至跟随车辆;
[0092]
步骤5)跟随车辆接收领航车辆下发的队形参数,队形参数与上一周期的队形参数相同,不进行处理;如队形参数与上一周期的队形参数不同,则对队形参数进行平滑处理;
[0093]
步骤6)对队形参数进行时变处理;
[0094]
步骤7)根据领航车位置、航向、速度、横摆角速度和队形参数计算跟随车辆参考位置、参考速度;
[0095]
步骤8)根据跟随车辆位置、速度、跟随车辆参考位置、参考速度和队形参数计算跟随车辆期望速度、期望前轮转角角度;
[0096]
步骤9)在编队行驶过程中,编队中的跟随车辆将利用通信模块将自身编号、位置、速度、航向信息周期性上报至领航车辆;
[0097]
步骤10)在编队行驶过程中,如领航车驾驶员触发编号i跟随车辆离开编队,则编号i跟随车辆逐渐驶离编队;如有编队外车辆申请加入编队,则需向领航车辆上报入队请求,领航车辆接收到入队请求后,对编队外车辆进行编号处理后,允许编队外车辆加入编队;
[0098]
步骤11)进入下个队形参数下发周期,从步骤4)逐步开始。
[0099]
进一步,所述步骤3)具体为:
[0100]
s31:通信模块中,专用短程通讯(dedicated short range communications)使用udp接口通信;
[0101]
s32:定位模块中,车辆使用gnss获取自身的位置信息、航向信息、速度信息。
[0102]
进一步地,所述步骤4)中,建立基于领航-跟随法的编队模型,如图3所示,队形参数如下:
[0103][0104]
其中,表示领航车与编号i的跟随车辆的参考距离,表示领航车与编号i的跟随车辆两者后轴中心连线与领航车纵向速度方向的参考夹角。
[0105]
进一步地,所述步骤5)中,为解决由队形切换导致的跟随车参考行驶状态突变问题,提出线性队形参数控制模型,对队形参数进行平滑处理,使跟随车参考状态由原队形向新队形平滑靠近,从而保证编队系统的安全稳定,队形参数平滑处理过程如下:
[0106]
s51:平滑后的参考距离由如下公式计算:
[0107][0108]
其中,t表示当前时刻,t0表示队形参数发生变化的时刻,即队形变换开始时刻,分别表示编号i跟随车辆队形变换前、后的参考距离,t1表示队形参数平滑处理时间;
[0109]
s52:平滑后的参考夹角由如下公式计算:
[0110][0111]
其中,公式中参数代表含义与s51公式中所代表含义一致,分别表示编号i跟随车辆队形变换前、后的参考夹角。
[0112]
进一步地,所述步骤6)中,编队行驶中跟随车参考行驶状态存在偏离现象和回退现象,如图4所示。当领航车行驶至位置b时,推算得到的动跟随车参考行驶状态在位置b
*
,明显偏离领航车行驶路径,且随着领航车横摆角速度和队形参数距离的增大,偏离现象逐渐严重;当领航车从位置a移动到位置b时,得到的跟随车参考行驶状态由位置a移动到位置b,未来时刻的位置b在位置a后侧,跟随车参考行驶状态出现回退现象。
[0113]
为提高跟随车参考行驶状态的准确度,充分考虑领航车速度、横摆角速度以及夹角参数对跟随车参考行驶状态推算的影响,提出时变队形参数优化方法,如图5所示。队形参数时变处理:
[0114]
s61:时变后的参考夹角由如下公式计算:
[0115][0116]
其中,公式中参数代表含义与s51、s52公式中所代表含义一致,ω、v分别表示领航车辆的横摆角速度、速度。
[0117]
进一步地,所述步骤7)中,队内车辆在保持队形转弯时,转弯半径不同、行驶速度不同,但横摆角速度相同。由图3中运动几何关系可得跟随车辆参考速度。跟随车辆参考位置和参考速度计算过程如下:
[0118]
s71:跟随车辆参考位置由如下公式计算:
[0119][0120]
其中,公式中参数代表含义与s51、s61公式中所代表含义一致,x、y分别表示领航车辆位置横坐标、纵坐标,θ表示领航车的航向角;
[0121]
s72:跟随车辆参考速度由如下公式计算:
[0122][0123]
其中,公式中参数代表含义与s52、s61公式中所代表含义一致。
[0124]
进一步地,所述步骤8)中,将跟随车与参考行驶状态之间的距离控制问题转换为常见的两车追逐问题,已知当前时刻两车距离、参考距离、当前速度、参考速度,通过设定追逐时间,得到当前时刻的加速度大小;几何跟踪方法是一种基于横向跟踪误差的非线性反馈函数,并且能实现横向跟踪误差指数收敛于0,根据跟随车辆位姿与参考行驶状态的相对几何关系,如图6所示,可以直观地获得车辆前轮转角的控制量。
[0125]
跟随车辆期望速度、期望前轮转角角度计算过程如下:
[0126]
s81:跟随车辆与领航车辆的距离由如下公式计算:
[0127][0128]
其中,公式中参数代表含义与s71公式中所代表含义一致,xi、yi分别表示编号i跟随车辆的位置横坐标、纵坐标;
[0129]
s82:跟随车辆参考加速度由如下公式计算:
[0130][0131]
其中,公式中参数代表含义与s51、s72、s81公式中所代表含义一致,vi表示编号i跟随车辆的速度,t2表示跟随车辆车间距离调整时间;
[0132]
s83:跟随车辆期望速度由如下公式计算:
[0133][0134]
其中,公式中参数代表含义与s82公式中所代表含义一致;
[0135]
s84:跟随车辆期望前轮转角角度由如下公式计算:
[0136][0137]
其中,公式中参数代表含义与s71、s81、s82、s83公式中所代表含义一致,θi、li分别表示编号i跟随车辆的航向、轴距,k表示系数。
[0138]
进一步地,所述步骤10)中,编队内车辆出入编队方法如下:
[0139]
s91:编队内车辆出队时,领航车辆将编号i跟随车辆离队指令下发,编号i跟随车辆接收到离队指令后靠右驶离编队,并将离队状态上报至领航车;编号i跟随车辆完全驶离编队后,领航车辆将编号i跟随车辆出队信息下发至所有跟随车辆,并将i 1及以后的跟随车辆重新编号;出队和重新编号完成后,编号为i及以后的跟随车辆根据新的队形参数调整运动状态;
[0140]
s92:编队外车辆入队时,入队车辆向领航车辆上报入队请求,并将车辆自身位置、航向和速度信息上报至领航车辆,领航车辆检查编号列表是否有可用编号,如有可用编号,领航车辆根据车辆位置和速度,分配编号i,并插入至编号i-1和编号i 1跟随车辆之间;编号i 1及以后跟随车辆的队形参数发生改变,主动减速,等待编号i 1跟随车辆与编号i-1跟随车辆达到目标队形状态,编号i 1跟随车辆上报入队准备就绪信息至领航车辆;领航车辆向编号i跟随车辆下发队列参数,编号i跟随车辆主动改变运动状态,待达到目标队形状态后,上报入队完成信息至领航车辆;入队完成后,领航车辆主动调整车辆进入正常行驶状
态。
[0141]
实施例
[0142]
本发明在建立领航-跟随模型的基础上,运用队形参数平滑变换方法、参考夹角时变方法及参考速度时变方法得到跟随车参考行驶状态,分别基于纯跟踪方法和平滑追逐方法计算前轮转角控制量和速度控制量,使编队车辆在不同速度和队形参数下保持稳定的行驶状态。本发明利用matlab/simulink搭建仿真平台,仿真试验环境为inter corei7,2.30ghz处理器,windows 10操作系统,仿真软件为matlab r2018b。车辆编队由1辆领航车ⅰ和3辆跟随车ⅱ组成,仿真时间为400s,步长为0.1s。
[0143]
一、试验设计和参数设置
[0144]
领航车行驶轨迹的函数表达如下:
[0145][0146][0147]
其中,ω表示领航车横摆角速度;a表示领航车加速度,t表示时刻。
[0148]
假设领航车和跟随车的初始位置分别为(0,0)、(-10,5)、(-15,-10)、(-20,5),初始航向分别为0、π/6、π/4、-π/6,初始速度均为零,纵队队形参数为菱形队形参数为假设在160s、310s时刻,分别由纵队变为菱形、菱形变为纵队。
[0149]
队形参数平滑处理时间t1=10,跟随车辆车间距离调整时间t2=2,跟随车轴距l1=l2=l3=1.5,系数k=0.03。
[0150]
二、瞬时计算步骤
[0151]
以跟随车1为例,在62.4s时刻的计算过程,描述本发明的实现步骤。
[0152]
s51:平滑后的参考距离由如下公式计算:
[0153][0154]
其中,t表示当前时刻,数值为62.4,t0表示队形参数发生变化的时刻,即队形变换开始时刻,数值为0,分别表示编号i跟随车辆队形变换前、后的参考距离,数值分别为5、5,t1表示队形参数平滑处理时间,数值为10;则数值为5。
[0155]
s52:平滑后的参考夹角由如下公式计算:
[0156][0157]
其中,公式中参数代表含义与s51公式中所代表含义一致,分别表示编号i跟随车辆队形变换前、后的参考夹角,数值分别为π、π;则数值为π。
[0158]
s61:时变后的参考夹角由如下公式计算:
[0159][0160]
其中,公式中参数代表含义与s51、s52公式中所代表含义一致,ω、v分别表示领航车辆的横摆角速度、速度,数值分别为-0.195、21.91,则数值为3.164。
[0161]
s71:跟随车辆参考位置由如下公式计算:
[0162][0163]
其中,公式中参数代表含义与s51、s61公式中所代表含义一致,x、y分别表示领航车辆位置横坐标、纵坐标,数值分别为52.19、-0.99,θ表示领航车的航向角,数值为-0.1188,则数值分别为47.21、-0.51;
[0164]
s72:跟随车辆参考速度由如下公式计算:
[0165][0166]
其中,公式中参数代表含义与s52、s61公式中所代表含义一致,数值为21.89。
[0167]
s81:跟随车辆与领航车辆的距离由如下公式计算:
[0168][0169]
其中,公式中参数代表含义与s71公式中所代表含义一致,xi、yi分别表示编号i跟随车辆的位置横坐标、纵坐标,数值分别为47.14、-0.53则ρi数值为5.07;
[0170]
s82:跟随车辆参考加速度由如下公式计算:
[0171][0172]
其中,公式中参数代表含义与s51、s72、s81公式中所代表含义一致,vi表示编号i跟随车辆的速度,数值为21.95,t2表示跟随车辆车间距离调整时间,数值为2,则数值为-0.025;
[0173]
s83:跟随车辆期望速度由如下公式计算:
[0174][0175]
其中,公式中参数代表含义与s82公式中所代表含义一致,则数值为21.925;
[0176]
s84:跟随车辆期望前轮转角角度由如下公式计算:
[0177][0178]
其中,公式中参数代表含义与s71、s81、s82、s83公式中所代表含义一致,θi、li分别表示编号i跟随车辆的航向、轴距,数值分别为-0.079、1.5,k表示系数,数值为0.03,则数值为0.004。
[0179]
三、试验结果
[0180]
领航车和跟随车全局路径如图7所示,跟随车与领航车相比路径偏差如图8所示。试验结果表明,3辆跟随车快速消除初始误差,在队形一定情况下,与领航车的横向最大误差分别为0.04m、0.21m、0.42m;在队形变换时,编队整体状态稳定平滑变化。
[0181]
上述参照实施例对该一种编队车辆保持与变换行驶状态的接收和执行控制指令的控制装置及其方法进行的详细描述,是说明性的而不是限定性的,可按照所限定范围列举出若干个实施例,因此在不脱离本发明总体构思下的变化和修改,应属本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。