1.本发明实施例涉及自动驾驶技术,尤其涉及一种自动驾驶车辆的仿真系统。
背景技术:
2.自动驾驶车辆是指能够感知环境、自主规划路线并控制车辆到达目的地的一种智能车辆。它具备传统车辆无法比拟的优点,比如智能化,网联化等,是当前汽车工业发展的必然趋势和主要的技术创新领域。
3.随着自动驾驶技术的迅速发展,仿真测试对于自动驾驶技术安全应用的重要性在开发与验证领域越发明显,一个合理的完整的仿真平台能加速整个系统的开发和测试,提供正反馈。一个良好的高效的自动驾驶仿真系统贯穿了自动驾驶技术的开发、测试、应用以及运营等整个流程,它能把大量自动驾驶开发和测试的成本转化为gpu的物料成本和工程师的知识经验成本,从而大大降低开发成本。所以构建一个高效良好的自动驾驶仿真系统对自动驾驶技术的发展有着重要的意义。
4.然而,现有技术中的仿真方法主要以软件仿真为工具,以验证算法为目的,对自动驾驶系统的实时性、可靠性方面的考虑不够充分,对自动驾驶系统的性能评估也缺乏高效的参考依据。
技术实现要素:
5.为了解决现有技术中的问题,本发明提供一种自动驾驶车辆的仿真系统,以软件和硬件相结合的方式对自动驾驶系统进行相应的仿真测试,其软件仿真主要以构建仿真环境和环境感知为主,硬件结合了控制器在环和车辆模型在环,相较于实车在环,车辆模型在环进一步降低了测试成本,相较于车辆模型,进一步保证了测试实时性。同时考虑驾驶员在环,便于对自动驾驶与人工驾驶的控制性能进行综合对比,实现自动驾驶的高效率、低成本仿真。
6.本发明实施例提供了一种自动驾驶车辆的仿真系统,包括:控制子系统、以及分别与所述控制子系统相连的车辆子系统、感知子系统和环境子系统;
7.所述车辆子系统为根据自动驾驶测试需求搭建的车辆动力学模型,用于向所述控制子系统反馈车辆状态信号,以及接收控制子系统的车辆控制信号;
8.所述感知子系统为根据自动驾驶测试需求搭建的传感器模型,用于获取仿真场景中自动驾驶车辆周边的目标物体信息,并向所述控制子系统发送所述目标物体信息;
9.所述环境子系统为根据自动驾驶测试需求搭建的仿真交通环境,用于提供验证自动驾驶算法的虚拟交通环境;
10.所述控制子系统用于根据所述车辆子系统、感知子系统和环境子系统发送的信息控制所述车辆子系统的行驶路径、驾驶决策和运动状态,进行仿真测试;
11.其中,所述控制子系统包括:人类驾驶员/控制器硬件/人类驾驶员和控制器硬件组合。
12.可选的,当所述控制子系统为人类驾驶员时,所述系统为全人工驾驶的驾驶员在环仿真系统;
13.当所述控制子系统为控制器硬件时,所述系统为全自动驾驶的控制器硬件在环仿真系统;
14.当所述控制子系统为人类驾驶员和控制器硬件组合时,所述系统为部分自动驾驶仿真系统。
15.可选的,所述车辆子系统还和所述感知子系统通信连接,并向所述感知子系统发送车辆位姿信息。
16.可选的,所述控制子系统包括路径规划模块、驾驶决策模块以及运动控制模块;
17.所述路径规划模块用于接收所述感知子系统的信号,并根据感知到的信号规划出可行驶的路径;
18.所述驾驶决策模块根据规划结果和周边环境进行决策控制;
19.所述运动控制模块用于根据所述驾驶决策模块的决策结果控制所述车辆子系统的运动状态,进行仿真测试。
20.可选的,搭载所述车辆子系统的硬件设备通过以太网通讯接口和所述感知子系统通信;通过can接口和所述控制子系统通信。
21.可选的,所述感知子系统通过以太网通讯接口和所述控制子系统相连。
22.可选的,搭载所述感知子系统的硬件设备通过以太网通讯接口和所述控制子系统通信。
23.本发明的有益效果:
24.(1)兼顾了软件仿真和硬件仿真的优点,相比纯软件仿真,提高了自动驾驶系统仿真的实时性,相比纯硬件仿真,又降低了测试的成本,提高了测试的效率。
25.(2)考虑了驾驶员的因素,便于对自动驾驶与人工驾驶员的控制性能进行综合对比,对自动驾驶系统的性能评估缺乏高效的参考依据。
26.(3)引入了车辆模型在环,相较于虚拟车辆模型,其仿真结果更接近于实际结果,相较于实车测试,提高了测试安全性,缩短了开发周期。
附图说明
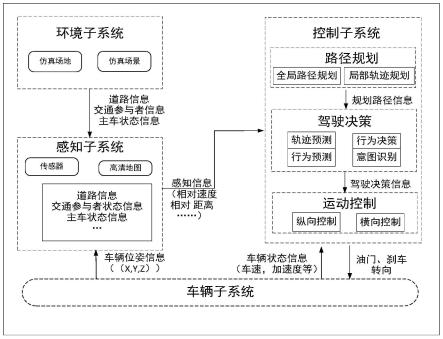
27.图1为本发明实施例提供的自动驾驶仿真系统总体架构图;
28.图2是本发明实施例一中的全人工驾驶在环仿真系统架构图;
29.图3是本发明实施例二中的全自动驾驶控制器硬件在环仿真系统架构图;
30.图4是本发明实施例三中的部分自动驾驶仿真系统架构图。
具体实施方式
31.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
32.图1为本发明实施例提供的自动驾驶仿真系统总体架构图,该系统包括:控制子系统、以及分别与所述控制子系统相连的车辆子系统、感知子系统和环境子系统。
33.其中,车辆子系统为根据自动驾驶测试需求搭建的车辆动力学模型,用于向所述控制子系统反馈车辆状态信号,以及接收控制子系统的车辆控制信号。本实施例中的车辆动力学模型不需要运行在虚拟的离线仿真环境中,该车辆模型可以实时加载到车辆模型实时在环的硬件设备中,能够更加真实地模拟测试中的实车状态。搭载该车辆子系统的实时硬件设备具备udp(以太网)通讯接口和can通讯接口,udp通讯接口主要用于和感知子系统的信号通信,can接口主要用于和控制子系统的信号通信,可通过can通讯接口向控制子系统反馈车辆状态信号,及接收控制器子系统的车辆控制信号。
34.感知子系统为根据自动驾驶测试需求搭建的传感器模型,用于获取仿真场景中自动驾驶车辆周边的目标物体信息,例如目标物体的相对车速、相对距离、车道线位置等。感知子系统运行在上位机中,具备udp通讯接口,用于和控制子系统进行通信,发送所感知到的目标物体信息。
35.环境子系统为根据自动驾驶测试需求搭建的仿真交通环境,用于提供验证自动驾驶算法的虚拟交通环境。具体的,环境子系统主要由两部分构成,一是根据测试需求建立的仿真场地,比如高速公路、封闭园区、公园等;二是根据测试需求建立的仿真功能场景,例如紧急制动、跟车、行人避让等。该系统运行在上位机中,通过3d渲染使得交通环境更加真实逼真。搭载该环境子系统的硬件设备具备usb接口和udp通讯接口,usb接口主要接收驾驶员操纵信号,并通过udp通讯将驾驶员的操纵信号发送到控制子系统中,另外车辆子系统中的位姿信号也是通过udp通讯发送的。
36.所述控制子系统用于根据所述车辆子系统、感知子系统和环境子系统发送的信息控制所述车辆子系统的行驶路径、驾驶决策和运动状态,进行仿真测试。
37.具体的,控制子系统包括路径规划模块、驾驶决策模块、运动控制模块。路径规划模块接收感知子系统的信号,根据感知到的环境信息规划出可行驶的路径。驾驶决策模块根据规划结果和周边环境进行决策控制,解决自动驾驶车辆的行驶策略问题。运动控制模块分为纵向运动控制和横向运动控制,该模块包括自动驾驶控制算法模型和驾驶员人工操纵模型组成,分别针对自动驾驶模式和人工驾驶模式;搭载控制子系统的设备具备udp通讯接口和can接口,udp通讯接口主要用于和感知子系统进行信号传输,can通信接口主要用于接受车辆子系统的状态信号和发送车辆控制信号。
38.本实施例中,根据控制子系统载体的不同,所提出的仿真平台可开展全自动驾驶仿真、全人工驾驶仿真及部分自动驾驶仿真。环境子系统、车辆子系统、感知子系统及控制器控制子系统构成了全自动驾驶系统的控制器硬件在环仿真平台;将其中的控制子系统替换为驾驶员操纵装置硬件,由驾驶员充当控制子系统的角色,则构成了全人工驾驶的驾驶员在环仿真平台。在上述仿真平台中,可将控制器硬件及驾驶员操纵装置硬件同时应用于仿真系统,分别负责部分车辆控制功能,则构成了部分自动驾驶系统的控制器硬件及驾驶员在环仿真平台。
39.具体的,在全人工驾驶下,人类驾驶员可作为控制子系统,其硬件载体一般是可以提供驾驶员操作行为的外接设备。驾驶员通过视觉,听觉处理环境子系统中和感知子系统中的各种感知信息,经过人类大脑的信息处理,对路径规划、驾驶决策和运动控制做出判断执行,而后将驾驶动作作用于车辆子系统。
40.在全自动驾驶下,控制子系统运行在自动驾驶控制器中,硬件载体一般为快速原
型控制器或域控制器,系统中的路径规划、驾驶决策、运动控制都是在该控制器硬件中实时计算的。
41.在部分自动驾驶下,控制子系统有纵向控制系统和横向控制系统两部分,纵向控制系统运行在自动驾驶控制器硬件中,构成控制器硬件在环;横向控制系统由驾驶员装置组成,构成驾驶员在环。为了保证仿真的实时性和系统可靠性,车辆子系统运行在相应的硬件设备中,其硬件载体一般为运算能力较强的高性能实时目标机。
42.本实施例的技术方案,以软件和硬件相结合的方式对自动驾驶系统进行相应的仿真测试,其软件仿真主要以构建仿真环境和环境感知为主,硬件结合了控制器在环和车辆模型在环,相较于实车在环,车辆模型在环进一步降低了测试成本,相较于车辆模型,进一步保证了测试实时性。同时考虑驾驶员在环,便于对自动驾驶与人工驾驶的控制性能进行综合对比,实现自动驾驶的高效率、低成本仿真。
43.实施例一:全人工驾驶系统仿真实施例
44.图2所示的实施例是全人工驾驶在环仿真系统架构图,该实施例中,人类驾驶员视为控制子系统,硬件载体为驾驶员操纵装置罗技g29,但不限于g29,只要可以提供驾驶员操作行为的外接设备皆可,该子系统是整个仿真系统的核心部分。环境子系统和感知子系统作为整个仿真系统的重要组成部分,其主要作用是提供测试场地和输出感知信息,一般由相关的软件组成,例如prescan,matlab、roadrunner等,其硬件载体为高性能计算机工作站。车辆子系统作为仿真系统中的被控对象,要求计算精度高,系统稳定性强,所以硬件载体一般为高性能实时目标机。
45.本实施中以现实中常见的驾驶员变道超车为例,详细说明该仿真系统的组成及工作模式。该例子中参考现实场景道路并用场景软件roadrunner搭建了直线双车道公路,同时从相关的库中引入了前车、行人等交通参与者模型,并且设置环境因素为晴天,道路状况良好,摩擦系数正常,环境中搭建的建筑物参考了实际建筑物,以上要素构成了仿真的环境子系统。该软件中的感知模型库提供了毫米波雷达,前视摄像头等传感器模型,组成了仿真的感知子系统,在该模式下,感知子系统通过前车碰撞预警、盲区预警等给予驾驶员一定程度的感知预判。控制子系统则是驾驶员,其中驾驶员集成了相当一部分的感知子系统功能,因为驾驶员通过视觉、听觉可以获得前车距离、自车速度、车道情况、行人等环境信息,驾驶员从获取的环境信息做出超车预判,并且超车时控制了油门和刹车的力度,可以顺利完成变道超车的动作。通过matlab/simulink软件建立的十四自由度车辆动力学模型作为车辆子系统,其硬件载体为高性能实时目标机,该硬件的运算能力强,实时性,稳定性优异,当驾驶员采取超车动作时,其控制信号传到高性能实时目标机中,经过运算,该硬件的车辆子系统输出相应的车辆状态信息,例如自车车速、横摆角速度、纵向位移、横向位移等,同时反馈到高性能计算机工作站的环境子系统,再经过3d渲染出车辆的实时位置。高性能计算机工作站和罗技g29是通过usb进行信号传输的,高性能实时目标机和罗技g29是通过can进行信号交换的,高性能计算机工作站和高性能实时目标机通过以太网udp进行通讯。该例子阐述了全人工驾驶模式下仿真系统中各子系统的工作状况以及系统之间的信号流。
46.实施例二:全自动驾驶仿真系统实施例
47.图3所示的实施例是全自动驾驶仿真系统架构图,由图可知,该实施例与全人工驾驶系统仿真实施例最大的区别在于控制子系统,该控制子系统由自动驾驶控制器构成,硬
件载体为快速原型控制器,一般该类型的硬件设备有speedgoat basline、dspace等,该硬件不仅稳定性强,抗震性好,并且便于携带。该实施例中的自动驾驶控制器接受环境子系统和感知子系统的信息,实时计算出规划路径,驾驶决策和运动控制命令,该系统不仅负责计算输出纵向控制中的油门刹车信号,而且负责输出横向控制中的转向命令。对于车辆子系统,与同上述图2所述的一样,运行在高性能目标实时机中。
48.以自动驾驶中的典型场景“封闭园区的低速自动驾驶”为例详细说明全自动驾驶仿真的组成以及工作模式。对于环境子系统利用相关软件建立测试场景,例如prescan、百度apollo、panosim等,对于封闭园区的获取,从开源网站openstreetmap中截取需要的金龙厂区地图,然后根据要求进行改进,完成之后添加其他车辆以及交通参与者模型,对于建筑物使用第三方软件sketchup进行建模,导入.dae文件,形成3d建筑物。这样就建立了封闭园区环境子系统。从软件库中导入3个激光雷达,1个毫米波雷达,3个摄像头,根据实际设备的参数设置这些虚拟传感器的参数,具体参照了海格深蓝车型的传感器方案,s由此构成了仿真系统的感知子系统,环境子系统和感知子系统均运行在高性能计算机工作站中。对于控制子系统,如上述所说,硬件载体为快速原型控制器,该子系统通过以太网接受来自感知子系统的相对速度,相对距离,横摆角速度,gps位置等信息,通过路径规划算法、决策算法和控制算法的计算,得到可行驶路径,局部轨迹、驾驶决策信息、控制信息等,通过can将这些信息发送到车辆子系统的高性能实时目标机中,以建立的14自由度车辆动力学为车辆子系统,可以提供更加精确的车辆状态和反馈信息,该14自由度动力学模型接受油门、刹车和转向信号,同时经过高性能实时目标机的实时计算将得到的车速,车辆坐标,大地坐标等状态信息反馈到自动驾驶控制器和高性能计算机目标工作站中,再通过环境3d渲染出来,使仿真效果更加真实。
49.实施例三:部分自动驾驶仿真系统实施例
50.图4所示的实施例是部分自动驾驶仿真系统架构图,由图可知,该实施例与人工驾驶和全自动驾驶系统仿真实施例最大的区别在于控制子系统的构成不同,该实施例中控制子系统由两部分组成,分别是人工驾驶和自动驾驶控制器,硬件载体分别为罗技g29和快速原型控制器。该控制子系统针对纵向控制和横向控制,采用驾驶员负责转向控制,自动驾驶控制器负责油门和刹车控制,体现了l1级自动驾驶的仿真需求。
51.以现实中的高速公路自适应巡航控制为例详细说明部分自动驾驶仿真系统的组成以及工作模式。该例子中从开源网站openstreetmap中截取一段高度公路场景,形成.osm文件,导入相关建图软件,例如prescan、roadrunner等,需要注意,导入文件的时候有些地方会报错,需要根据实际数据手动更改,地图完成之后,根据自适应巡航控制从相关的软件库中加入若干前车、后车模型,这样就建立了环境子系统。因为现阶段大多数主机厂针对自适应巡航采用的传感器方案一般都是毫米波 摄像头,所以从软件感知库中加入毫米波雷达和摄像头构成仿真的感知子系统,该感知子系统可以获知环境子系统中与前车的相对距离,相对速度等信息,这两个子系统子在高性能计算机工作站中经过运算,将相对距离、相对速度信息通过udp发送到控制子系统中。因为高速公路自适应巡航控制系统属于高级辅助驾驶,也属于纵向辅助驾驶的一种,只能对油门和刹车进行自适应调节,并不能对前轮转角进行自适应调节,所以控制子系统中外接设备罗技g29负责转向控制,该设备通过usb将驾驶员的转向信号发送到高性能实时目标机中,以控制车辆的转向运动对于转向的控制。
快速原型控制器中运行纵向自适应控制算法,该算法可以根据设置的巡航速度以及从感知子系统输入的相对速度和相对距离,可以使自车以一定速度一定距离跟随前车,当前车驶离时可以控制自车以巡航速度进行行驶。控制子系统通过can将油门、刹车和转向信号输入到高性能实时目标机performance中的车辆子系统,该例子中的车辆子系统为14自由度车辆动力学模型,当然仿真要求较低可以使用7自由度,另外也可以引入第三方车辆动力学软件,比如carsim、trucksim等。经过高性能实时目标机的实时计算,该车辆模型输出了自车速度、自车的位置坐标、横摆角及角速度、俯仰角、侧偏角等状态信息。通过can将这些状态信息反馈到快速原型控制器中,另外通过udp将位置坐标反馈到高性能计算机工作站中的环境子系统,进行环境中的实时定位。该例子很好的放映了部分自动驾驶系统仿真中各子系统的工作模式及信号交换,以及软件硬件的结合优势。说明本发明适用于
52.以上实施例说明本发明所提出的仿真平台适合多级别下的自动驾驶仿真,同时综合了软件仿真、硬件仿真的优势,另外引入驾驶员因素,便于后期开展驾驶数据对比。
53.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。