1.本发明属于机器人控制技术领域,具体涉及多模式少驱动张拉移动机器人控制系统及控制方法。
背景技术:
2.张拉整体结构是由不连续的受压元件及连续的受拉元件组成的自应力网状结构,在张拉整体结构中加入驱动使其产生运动便形成了张拉移动机器人。
3.张拉移动机器人具有易变形的特点,通常具备多种运动模式,可应用于非结构化野外环境。由于张拉移动机器人需较多的驱动器来维持其运动过程中的动态稳定,因此机器人的控制系统较为复杂。
4.此外,传统张拉移动机器人在实际控制过程中,需先观察机器人状态,手动输入数据来控制多个电机实现运动,且机器人运动后,需手动令机器人恢复至初始状态,以便再进行下一次运动。这类控制方法的操作程序繁琐,大大降低了机器人的运动效率。
5.为解决现有张拉移动机器人存在的控制系统复杂、操作程序繁琐的问题,将张拉移动机器人中的独立受拉绳索聚集成可绕若干节点滑动的滑移绳索,形成滑移索驱动的张拉移动机器人。不仅能减少驱动数目,简化机器人控制系统,还可保持张拉整体结构可变形特征,使机器人具有少驱动多模式的特点。
6.目前这类少驱动多模式的张拉移动机器人成果较少,同时缺乏对其系统化的控制方法的研究。
技术实现要素:
7.本发明为解决现有技术存在的问题而提出,其目的是提供多模式少驱动张拉移动机器人控制系统及控制方法。
8.本发明的技术方案是:一种多模式少驱动张拉移动机器人控制系统,所述多模式少驱动张拉移动机器人控制系统设置有:传感器,与数据采集卡进行数据通讯,将采集到的数据传输到数据采集卡;数据采集卡,与控制器进行数据通讯,接收传感器采集到的外部数据信息和自身数据信息;控制器,与电机驱动器进行数据通讯,控制器结合外部数据信息和自身数据信息,调取到对应的运动步态,运动步态数据传输给电机驱动器;电机驱动器,与步进电机进行数据通讯,将运动步态数据转化为步进电机控制指令,将控制指令传输到步进电机;步进电机,为执行单元,控制指令控制步进电机的主轴输出;编码器,与控制器进行数据通讯,将步进电机的输出信息传输到控制器。
9.更进一步的,所述传感器包括激光测距传感器、力矩传感器,激光测距传感器采集移动机器人识别外部地形特征,力矩传感器检测采集移动机器人自身的运动状态信息。
10.更进一步的,所述力矩传感器包括力矩传感器1、力矩传感器2,力矩传感器1采集步进电机1的运动状态信息,力矩传感器2采集步进电机2的运动状态信息。
11.更进一步的,所述控制器包括嵌入式主控制模块、步进电机驱动模块、变压模块、电机接口、电源接口模块、主机开关。
12.更进一步的,所述嵌入式主控制模块包括控制指令接收模块、控制算法模块、运动控制模块;控制指令接收模块,接收红外控制器外部输入的控制指令;控制算法模块,用于机器人识别外部环境地形特征,并自适应切换相应的运动步态;运动控制模块,用于给出张拉移动机器人运动指令。
13.更进一步的,所述运动步态包括蠕动运动步态、尺蠖运动步态以及翻滚运动步态,所述运动步态为对步进电机1、步进电机2的转速、转向、周期、启停控制的数据集合。
14.更进一步的,所述控制指令包括机器人运动状态控制、电机转速控制、设定驱动芯片电流保护、读取电机状态信息、读取flash表指定位、修改flash表指定位、flash表恢复默认值。
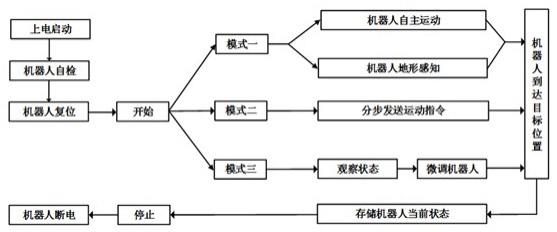
15.一种多模式少驱动张拉移动机器人控制系统的控制方法,包括以下步骤:a.运动前启动自检b.设定张拉移动机器人运动模式c.机器人在运动模式下进行运动d.检测运动过程中的外部地形特征e.机器人到达目标位置f.存储机器人当前状态g.停止。
16.更进一步的,步骤b中设定张拉移动机器人运动模式,其运动模式包括自主识别运动模式、指令操控运动模式、状态调整运动模式。
17.更进一步的,所述自主识别运动模式中包括对当前运动步态的判断,判断是否需要切换运动步态,所述运动步态包括蠕动运动步态、尺蠖运动步态、翻滚运动步态。
18.本发明的有益效果如下:本发明控制系统满足小型化要求且开发难度和成本低,驱动器硬件设计集成度高,同时将机器人多种步态的代码进行存储,仅需简单调用即可下发控制指令。
19.本发明传感及控制系统简单,可靠性好,驱动器采用驱控一体化设计,体积小,部署灵活且可靠性高,同时搭配传感系统准确识别地形特征及机器人自身状态,满足移动机器人在多种地形环境下的多种步态运动需求。
20.本发明的控制方法解决了传统移动机器人仅用单一运动模式无法有效适应真实环境多种地形的问题,通过预置机器人三种不同运动步态,配合传感系统感知不同地形特征而切换相应的步态,实现张拉移动机器人在多种地形环境中运动,同时控制系统无系留设计,满足野外环境的续航要求。
附图说明
21.图1为本发明中控制系统的结构框图;图2为本发明中红外控制器按键图;图3为本发明中控制实例流程图;图4为本发明中自主识别运动模式程序框图;图5为本发明中感知地形特征原理图;图6为本发明中指令操控运动模式程序框图;图7为本发明中嵌入式主控制模块接口图。
具体实施方式
22.以下,参照附图和实施例对本发明进行详细说明:如图1~7所示,一种多模式少驱动张拉移动机器人控制系统,所述多模式少驱动张拉移动机器人控制系统设置有:传感器,与数据采集卡进行数据通讯,将采集到的数据传输到数据采集卡;数据采集卡,与控制器进行数据通讯,接收传感器采集到的外部数据信息和自身数据信息;控制器,与电机驱动器进行数据通讯,控制器结合外部数据信息和自身数据信息,调取到对应的运动步态,运动步态数据传输给电机驱动器;电机驱动器,与步进电机进行数据通讯,将运动步态数据转化为步进电机控制指令,将控制指令传输到步进电机;步进电机,为执行单元,控制指令控制步进电机的主轴输出;编码器,与控制器进行数据通讯,将步进电机的输出信息传输到控制器。
23.所述传感器包括激光测距传感器、力矩传感器,激光测距传感器采集移动机器人识别外部地形特征,力矩传感器检测采集移动机器人自身的运动状态信息。
24.所述力矩传感器包括力矩传感器1、力矩传感器2,力矩传感器1采集步进电机1的运动状态信息,力矩传感器2采集步进电机2的运动状态信息。
25.所述控制器包括嵌入式主控制模块、步进电机驱动模块、变压模块、电机接口、电源接口模块、主机开关所述嵌入式主控制模块包括控制指令接收模块、控制算法模块、运动控制模块;控制指令接收模块,接收红外控制器外部输入的控制指令;控制算法模块,用于机器人识别外部环境地形特征,并自适应切换相应的运动步态;运动控制模块,用于给出张拉移动机器人运动指令。
26.所述运动步态包括蠕动运动步态、尺蠖运动步态以及翻滚运动步态,所述运动步态为对步进电机1、步进电机2的转速、转向、周期、启停控制的数据集合。
27.所述控制指令包括机器人运动状态控制、电机转速控制、设定驱动芯片电流保护、读取电机状态信息、读取flash表指定位、修改flash表指定位、flash表恢复默认值。
28.优选的,所述嵌入式主控制模块与步进电机驱动模块、变压模块、电源接口模块集成。嵌入式主控制模块与激光测距传感器模块、力矩传感器、电源及主机开关连接。
29.其中,力矩传感器安装于机器人步进电机处。两个步进电机中独立安装力矩传感器。
30.所述嵌入式主控制模块中控制电路用于接收外部控制指令,并发送电机控制信号到步进电机驱动模块;所述步进电机驱动模块用于接收所述电机控制信号对步进电机进行控制。
31.所述步进电机驱动模块的硬件接口包括:电机传感器及驱动接口、驱动器电源接口、电机电源接口、外部adc采集接口、程序下载接口。
32.所述步进电机驱动模块将电源芯片、驱动芯片、控制芯片皆集成到同一控制电路板上,电路板面积小、集成度高。
33.所述嵌入式主控制模块包括控制指令接收模块、控制算法模块、运动控制模块。
34.所述控制指令接收模块接受红外控制器依据nec协议实现,控制指令包括机器人运动状态控制、电机转速控制、设定驱动芯片电流保护、读取电机状态信息、读取flash表指定位、修改flash表指定位、flash表恢复默认值。
35.所述控制算法模块用于张拉移动机器人自我识别外部环境地形特征,并自适应切换相应的运动步态。所述控制算法通过调用激光测距传感器测量模块存储值并进行判别实现。
36.所述运动控制模块用于给出张拉移动机器人运动指令,包含三种基本运动步态,即蠕动运动步态、尺蠖运动步态以及翻滚运动步态,三种基本运动步态通过控制机器人两台步进电机的数据集规律运动实现。
37.如图2所示,远程控制包含自主识别运动模式、指令操控运动模式、状态调整运动模式控制按键和原地恢复机器人初始状态的恢复按键。
38.所述指令操控运动模式控制区包含蠕动运动步态、尺蠖运动步态和翻滚运动步态按键。
39.所述状态调整运动模式控制区包含张拉整体机器人电机1、电机2正反转及启停按键。
40.所述总体控制区包含开始、停止及激光测距三个命令按键。
41.所述机器人嵌入式主控制模块主要包括电机传感器及驱动接口、驱动器电源接口、串口通讯接口、电机电源接口、外部adc采集接口、程序下载接口,以及复位按键、拨码开关、状态显示led。
42.具体的,所述的状态显示led用于更加直观的观测驱动器控制状态,红色led用于通电指示,绿色led用于电机运行状态指示。所述拨码开关用于决定对应驱动器输出电机电流大小及频率。
43.需要说明的是,所述嵌入式主控制模块将电源芯片、驱动芯片、通信芯片、控制芯片集成到同一控制板上,控制板面积小、集成度高。
44.机器人的控制过程都是在张拉整体机器人躯体内部完成,张拉整体机器人在自我识别运动模式下能够自主运动并根据外部环境变化实现自适应运动状态切换,配合无系留设计机器人能够满足应用于真实环境的需求。同时配合红外控制器的设计增加张拉整体机器人运动的多样性,并能大大简化调试机器人的复杂性。
45.一种多模式少驱动张拉移动机器人控制系统的控制方法,包括以下步骤:
a.运动前启动自检b.设定张拉移动机器人运动模式c.机器人在运动模式下进行运动d.检测运动过程中的外部地形特征e.机器人到达目标位置f.存储机器人当前状态g.停止。
46.步骤b中设定张拉移动机器人运动模式,其运动模式包括自主识别运动模式、指令操控运动模式、状态调整运动模式。
47.所述自主识别运动模式中包括对当前运动步态的判断,判断是否需要切换运动步态,所述运动步态包括蠕动运动步态、尺蠖运动步态、翻滚运动步态。
48.步骤a 运动前启动自检,包括以下过程:打开滑移索张拉移动机器人控制器上的开关,机器人上电启动,检测自身状态,调用复位程序恢复为给定的初始状态。
49.步骤b设定张拉移动机器人运动模式,包括以下过程:点击红外控制器上所述运动模式控制区的按键,设定张拉移动机器人运动模式为自主识别运动模式、指令操控运动模式或状态调整运动模式。
50.步骤b中自主识别运动模式,具体包括以下步骤:首先,张拉移动机器人处于初始设定的蠕动运动步态开始向前运动。
51.然后,后台程序循环调用该步态对应的自定义的earthworm函数,每调用一次张拉移动机器人向前行进一个蠕动周期。
52.再后,激光测距传感器连续测量张拉移动机器人外部环境地形特征。
53.再后,通过距离变化感知并确认地形发生变化,向机器人所述主控制模块发送中断请求。
54.再后,机器人结束当前蠕动步态运动周期并记录当前电机位置信息,随后调用reset函数恢复至初始状态。
55.再后,移动机器人根据激光测距传感器测量数据,判断后续地形,随后确定该地形对应的蠕动、尺蠖或翻滚运动步态,并循环调用该步态对应的定义earthworm、inchworm或tumbling函数。
56.最后,张拉整体机器人继续向前行进若干周期直到下一次激光测距传感器感知地形变化并发送中断请求。
57.步骤b中指令操控运动模式,具体包括以下步骤:首先,张拉移动机器人处于复位后的初始状态,红外控制器循环调用key函数直到读取到用户按下一个指令操控运动模式控制区的3种运动步态按键。
58.然后,机器人主控制模块接收该运动步态相应的返回值。
59.再后,机器人主控模块根据返回值调用蠕动、尺蠖或翻滚运动步态相对应的earthworm、inchworm或tumbling函数,机器人按照该蠕动、尺蠖或翻滚运动步态运动一个周期。
60.最后,单个周期运动结束后机器人恢复到初始状态并等待用户给出下一周期运动
指令。
61.步骤b中状态调整运动模式,具体包括以下步骤:首先,观察张拉移动机器人当前状态,判断机器人是否需要进行电机位置调整。
62.然后,通过所述状态调整运动模式控制区电机正反转及启停按钮微调张拉移动机器人绳索长度,以更好地适应当前环境及状态下机器人的运动。
63.步骤b中张拉移动机器人在不同地形特征下选择的步态不同,其基于激光传感器的地形感知也有所不同,具体如下:将激光距离传感器安装于张拉整体机器人中上部,其距地面垂直距离记为h,机器人在运动过程中任意时刻位形不同,h值也随之变化。将传感器测量方向与竖直方向所成夹角记为,传感器测量值记为a。
64.ⅰ
.在平坦地面,机器人对应运动模式为尺蠖运动模式,此时传感器测量值a应在左右区间内波动。
65.ⅱ
.当机器人行进过程中遇到狭小空间,切换运动模式为蠕动运动模式,此时传感器测量值a应远小于。
66.ⅲ
.当机器人行进过程中遇到沟壑,切换运动模式为翻滚运动模式,此时传感器测量值a应远大于。
67.ⅳ
.当机器人行进过程中遇到下斜面,切换运动模式为翻滚运动模式,此时传感器测量值a应稍大于。
68.ⅴ
.当机器人行进过程中遇到上斜面或障碍物,两种场景下传感器测量值a都应稍小于,此时机器人仍保持原运动模式继续运动一段距离再次启动传感器进行测量,根据两次测量值的差值来判断地形特征为上斜面或障碍物,随后切换运动模式为上斜面的蠕动运动模式或越过障碍物的翻滚运动模式。
69.本发明控制系统满足小型化要求且开发难度和成本低,驱动器硬件设计集成度高,满足小型化需求,同时将机器人多种步态的代码进行存储,仅需简单调用即可下发控制指令。
70.本发明传感及控制系统简单,可靠性好,驱动器采用驱控一体化设计,体积小,部署灵活且可靠性高,同时搭配传感系统准确识别地形特征及机器人自身状态,满足移动机器人在多种地形环境下的多种步态运动需求。
71.本发明的控制方法解决了传统移动机器人仅用单一运动模式无法有效适应真实环境多种地形的问题,通过预置机器人三种不同运动步态,配合传感系统感知不同地形特征而切换相应的步态,实现张拉移动机器人在多种地形环境中运动,同时控制系统无系留设计,满足野外环境的续航要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。