技术特征:
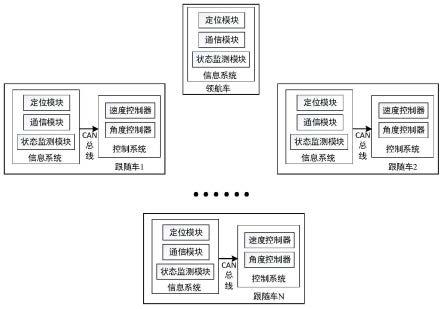
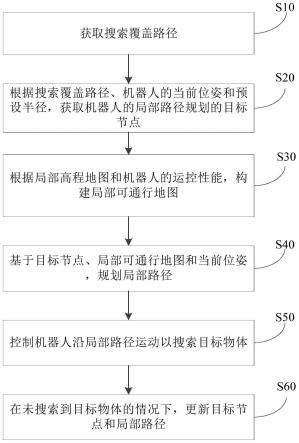
1.一种车联网环境下驾驶车辆编队保持与变换的控制系统,其特征是:包括数据采集与处理装置和接收和执行控制指令的控制装置,所述数据采集与处理装置和接收和执行控制指令的控制装置与车辆物理系统有线连接,实现接收数据采集与处理装置传输的信息并执行控制指令;所述数据采集与处理装置包括通信模块、定位模块和状态检测模块,用于车辆行驶所需信息数据的采集与处理;通信模块用于车辆间的信息交互;定位模块用于车辆自身位置信息、航向信息和速度信息的获取;状态检测模块用于车辆自身横摆角速度信息和前轮转角角度信息的获取;所述接收和执行控制指令的控制装置包括速度控制器和角度控制器,用于接收控制信息并执行控制指令;速度控制器用于将接收的期望速度信息转为速度控制指令;角度控制器:用于将接收的期望前轮转角角度信息转为角度控制指令。2.一种基于权利要求1所述控制系统的控制方法:其特征是:在建立领航-跟随模型的基础上,运用队形参数平滑变换方法、参考夹角时变方法及参考速度时变方法得到跟随参考行驶状态,分别基于纯跟踪方法和平滑追逐方法计算前轮转角控制量和速度控制量,使编队车辆在不同速度和队形参数下保持稳定的行驶状态;具体步骤如下:步骤1)联网车辆将自身信息,包括车辆id信息、位置信息、航向信息、速度信息、横摆角速度信息、前轮转角角度信息和编队请求上报至领航车辆;步骤2)领航车辆按照跟随车辆与领航车辆的距离、航向信息和编队请求,对跟随车辆按照1~n进行编号,形成编队序列信息,领航车辆周期的广播预编队信息;步骤3)跟随车辆接收到领航车辆的预编队信息后,与领航车辆建立v2v加入编队,完成编队;步骤4)编队完成后,领航车辆驾驶员选择队形,并将队形参数周期性下发至跟随车辆;步骤5)跟随车辆接收领航车辆下发的队形参数,队形参数与上一周期的队形参数相同,不进行处理;如队形参数与上一周期的队形参数不同,则对队形参数进行平滑处理;步骤6)对队形参数进行时变处理;步骤7)根据领航车位置、航向、速度、横摆角速度和队形参数计算跟随车辆参考位置、参考速度;步骤8)根据跟随车辆位置、速度、跟随车辆参考位置、参考速度和队形参数计算跟随车辆期望速度、期望前轮转角角度;步骤9)在编队行驶过程中,编队中的跟随车辆将利用通信模块将自身编号、位置、速度、航向信息周期性上报至领航车辆;步骤10)编队内车辆出入编队:在编队行驶过程中,如领航车驾驶员触发编号i跟随车辆离开编队,则编号i跟随车辆逐渐驶离编队;如有编队外车辆申请加入编队,则需向领航车辆上报入队请求,领航车辆接收到入队请求后,对编队外车辆进行编号处理后,允许编队外车辆加入编队;步骤11)进入下个队形参数下发周期,从步骤4)逐步开始。3.根据权利要求2所述的控制方法:其特征是:步骤3)所述跟随车辆接收到领航车辆的
预编队信息,具体为:s31:通信模块中,dsrc使用udp接口通信;s32:定位模块中,车辆使用gnss获取自身的位置信息、航向信息、速度信息。4.根据权利要求2所述的控制方法:其特征是:步骤4)中,所述队形参数如下:其中,表示领航车与编号i的跟随车辆的参考距离,表示领航车与编号i的跟随车辆两者后轴中心连线与领航车纵向速度方向的参考夹角。5.根据权利要求2所述的控制方法:其特征是:步骤5)中,所述队形参数平滑处理过程如下:s51:平滑后的参考距离由如下公式计算:其中,t表示当前时刻,t0表示队形参数发生变化的时刻,即队形变换开始时刻,分别表示编号i跟随车辆队形变换前、后的参考距离,t1表示队形参数平滑处理时间;s52:平滑后的参考夹角由如下公式计算:其中,公式中参数代表含义与s51公式中所代表含义一致,分别表示编号i跟随车辆队形变换前、后的参考夹角。6.根据权利要求2所述的控制方法:其特征是:步骤6)中,所述队形参数时变处理:s61:时变后的参考夹角由如下公式计算:其中,公式中参数代表含义与s51、s52公式中所代表含义一致,ω、v分别表示领航车辆的横摆角速度、速度。7.根据权利要求2所述的控制方法:其特征是:步骤7)中,所述跟随车辆参考位置和参考速度计算过程如下:s71:跟随车辆参考位置由如下公式计算:
其中,公式中参数代表含义与s51、s61公式中所代表含义一致,x、y分别表示领航车辆位置横坐标、纵坐标,θ表示领航车的航向角;s72:跟随车辆参考速度由如下公式计算:其中,公式中参数代表含义与s52、s61公式中所代表含义一致。8.根据权利要求2所述的控制方法:其特征是:步骤8)中,所述跟随车辆期望速度、期望前轮转角角度计算过程如下:s81:跟随车辆与领航车辆的距离由如下公式计算:其中,公式中参数代表含义与s71公式中所代表含义一致,x
i
、y
i
分别表示编号i跟随车辆的位置横坐标、纵坐标;s82:跟随车辆参考加速度由如下公式计算:其中,公式中参数代表含义与s51、s72、s81公式中所代表含义一致,v
i
表示编号i跟随车辆的速度,t2表示跟随车辆车间距离调整时间;s83:跟随车辆期望速度由如下公式计算:其中,公式中参数代表含义与s82公式中所代表含义一致;s84:跟随车辆期望前轮转角角度由如下公式计算:其中,公式中参数代表含义与s71、s81、s82、s83公式中所代表含义一致,θ
i
、l
i
分别表示编号i跟随车辆的航向、轴距,k表示系数。9.根据权利要求2所述的控制方法:其特征是:步骤10)中,所述编队内车辆出入编队方法如下:s91:编队内车辆出队时,领航车辆将编号i跟随车辆离队指令下发,编号i跟随车辆接收到离队指令后靠右驶离编队,并将离队状态上报至领航车;编号i跟随车辆完全驶离编队后,领航车辆将编号i跟随车辆出队信息下发至所有跟随车辆,并将i 1及以后的跟随车辆重新编号;出队和重新编号完成后,编号为i及以后的跟随车辆根据新的队形参数调整运动状态;s92:编队外车辆入队时,入队车辆向领航车辆上报入队请求,并将车辆自身位置、航向和速度信息上报至领航车辆,领航车辆检查编号列表是否有可用编号,如有可用编号,领航车辆根据车辆位置和速度,分配编号i,并插入至编号i-1和编号i 1跟随车辆之间;编号i 1及以后跟随车辆的队形参数发生改变,主动减速,等待编号i 1跟随车辆与编号i-1跟随车
辆达到目标队形状态,编号i 1跟随车辆上报入队准备就绪信息至领航车辆;领航车辆向编号i跟随车辆下发队列参数,编号i跟随车辆主动改变运动状态,待达到目标队形状态后,上报入队完成信息至领航车辆;入队完成后,领航车辆主动调整车辆进入正常行驶状态。
技术总结
本发明涉及一种车联网环境下驾驶车辆编队保持与变换的控制系统,包括数据采集与处理装置和接收和执行控制指令的控制装置,并与车辆物理系统有线连接,实现接收数据并执行控制指令;控制方法:在建立领航-跟随模型的基础上,运用队形参数平滑变换方法、参考夹角时变方法及参考速度时变方法得到跟随参考行驶状态,分别基于纯跟踪方法和平滑追逐方法计算前轮转角控制量和速度控制量,使编队车辆在不同速度和队形参数下保持稳定的行驶状态。有益效果:本发明提出线性队形变换方法,提高队形变换时编队系统的稳定性和安全性;考虑编队的融合和拆分、车辆入队和出队,提高编队的柔性和灵活性。灵活性。灵活性。
技术研发人员:潘世举 徐友春 朱愿 赵凯 何滨兵
受保护的技术使用者:中国人民解放军陆军军事交通学院军事交通运输研究所
技术研发日:2022.04.15
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。