1.本发明涉及臂架控制领域,具体而言,涉及一种臂架回转控制方法、装置、可读存储介质、系统和车辆。
背景技术:
2.目前,现有臂架回转控制方法为:技术工程师通过泵车人机交互界面设置回转多路阀的最小电流和最大电流值,匹配遥控器手柄的最小值和最大值,通过线性计算得出当前遥控器手柄开度下的多路阀电流。由于操作手的个人经验差异,将导致不同的操作手对相同臂架所设置的最大标定值不一致,当最大标定值设置过小时会限制臂架动作速度,设置过大时会降低臂架动作的安全性;并且该方法为恒角速度控制,同样的手柄开度在不同的臂架姿态下臂架末端线速度不一致,对电流设置准确性提出了更高的要求。
3.因此,如何设计出一种能够控制臂架在不同姿态下线速度一定的臂架回转控制方法为目前亟待解决的问题。
技术实现要素:
4.本发明旨在至少解决现有技术或相关技术中存在的技术问题之一。
5.因此,本发明的一个目的在于提供了一种臂架回转控制方法。
6.本发明的另一个目的在于提供了一种臂架回转控制装置。
7.本发明的第三个目的在于提供了一种可读存储介质。
8.本发明的第四个目的在于提供了一种臂架系统。
9.本发明的第五个目的在于提供了一种车辆。
10.为实现上述目的,本发明的技术方案提供了一种臂架回转控制方法,包括:获取臂架末端实际线速度;基于臂架末端目标线速度和臂架末端实际线速度的速度差值,对臂架末端实际线速度进行速度补偿。
11.根据本发明提供的臂架回转控制方法,包括:获取臂架末端实际线速度;基于臂架末端目标线速度和臂架末端的实际线速度的速度差值,对臂架末端实际线速度进行速度补偿。本技术通过对臂架末端的实际线速度进行速度补偿,进而控制臂架的回转台转动,形成闭环控制回路,并能够进行反馈调节,使得臂架旋转时更加的平顺,不同的操作人员进行操作时,也能够达到相同的旋转速度,简化了操作手的旋转操控要求,且相比于现有方案还解决了臂架电流设置过小引起的臂架回转不动作问题。这里的补偿可以是正值,也可以是负值,当臂架末端的实际线速度小于目标线速度时,对其进行正值补偿,当臂架末端的实际线速度大于目标线速度时,对其进行负值补偿。
12.其中,基于臂架末端目标线速度和臂架末端实际线速度控制臂架回转台转动的步骤具体为:计算出臂架末端目标线速度和臂架末端实际线速度的差值,基于差值对臂架末端实际线速度进行反馈调节,从而实现对臂架末端实际线速度的反馈调节,直到臂架末端的实际线速度达到臂架末端目标线速度。
13.另外,本技术提供的技术方案还可以具有如下附加技术特征:
14.在上述技术方案中,基于臂架末端目标线速度和臂架末端实际线速度的速度差值,对臂架末端实际线速度进行速度补偿步骤包括:获取臂架末端目标线速度;计算臂架末端目标线速度和臂架末端实际线速度的速度差值;基于速度差值对臂架回转台的转速进行pid反馈调节,直到臂架末端实际线速度与臂架末端目标线速度相同。
15.在该技术方案中,通过获取臂架末端目标线速度和臂架末端实际线速度,并计算出两者的差值,基于两者的差值对臂架回转台的转速进行pid反馈调节,直到臂架末端实际线速度与臂架末端目标线速度相同。该种设置,通过将臂架末端实际线速度调节到与臂架末端目标线速度相同,从而使臂架按照目标线速度进行转动,能够使得臂架的转动更加的平顺,使得不同的操作人员进行操作时,也能够达到相同的旋转速度。
16.在上述技术方案中,获取臂架末端目标线速度的步骤包括:获取操作手柄的张开角度;基于操作手柄的张开角度与线速度之间的关系确定出臂架末端的目标线速度。
17.在该技术方案中,获取臂架末端目标线速度的步骤包括:获取操作手柄的张开角度,并基于操作手柄的张开角度与目标线速度之间的关系,从而确定出臂架末端的目标线速度。该种设置,根据操作手柄的张开角度与线速度之间的关系,确定出臂架末端的目标线速度,从而就能够根据操作手柄的张开角度与臂架末端的目标线速度的关系来控制臂架的转动,从而使得不同的操作人员操作时都能够根据手柄的张开角度来使臂架的线速度达到相同。
18.在上述技术方案中,臂架回转台包括臂架回转马达,基于速度差值对臂架回转台的转速进行pid反馈调节步骤包括:基于速度差值控制臂架回转马达的供油量,以对臂架回转台的转速进行pid反馈调节。
19.在该技术方案中,臂架回转台包括臂架回转马达,能够基于速度差值控制臂架回转马达的供油量,从而对臂架回转台的转速进行pid反馈调节。其中,回转台的转动是通过控制电流的大小,从而控制臂架回转马达的供油量,使臂架回转台转动。
20.在上述任一技术方案中,获取臂架末端实际线速度的步骤包括:获取臂架末端当前位置信息和回转台角速度;根据回转台角速度和臂架末端当前位置信息计算出臂架末端的实际线速度。
21.在该些技术方案中,获取臂架末端实际线速度的步骤包括:获取臂架末端当前位置信息和回转台角速度。根据回转台角速度和臂架末端当前位置信息计算出臂架末端的实际线速度,从而根据实际线速度和臂架末端目标线速度对臂架驱动装置进行控制。
22.在上述技术方案中,获取臂架末端当前位置信息的步骤包括:获取臂架末端与回转台回转中心线的距离,臂架末端与回转台回转中心线的距离即为臂架末端当前位置信息;或获取臂架的臂节角度,基于获取的臂节角度计算出臂架末端当前位置信息。
23.在该技术方案中,获取臂架末端当前位置信息的步骤包括:获取臂架末端与回转台回转中心线的距离,臂架末端与回转台回转中心线的距离即为臂架末端当前位置信息;或获取臂架的臂节角度,基于获取的臂节角度能够计算出臂架末端当前的位置信息。从而通过当前位置信息和回转台的角速度计算出臂架末端目标线速度。
24.本发明第二方面的技术方案提供了一种臂架回转控制装置,包括第一获取模块,用于获取臂架末端实际线速度;控制模块,用于基于臂架末端目标线速度和臂架末端实际
线速度的速度差值,对所述臂架末端实际线速度进行速度补偿。能够实现本发明第一方面任一技术方案提供的臂架回转控制方法的步骤。因此,该臂架回转控制装置具有第一方面技术方案中的臂架回转控制方法的全部有益效果,在此不再赘述。
25.在上述技术方案中,控制模块包括:第二获取模块,用于获取所述臂架末端目标线速度;计算模块,用于计算臂架末端目标线速度和臂架末端实际线速度的差值;pid调节模块,用于基于速度差值对臂架回转台的转速进行pid反馈调节,直到臂架末端实际线速度与臂架末端目标线速度相同。
26.在上述技术方案中,第二获取模块包括:获取子模块,用于获取操作手柄的张开角度;关系确定子模块,用于基于操作手柄的张开角度与目标线速度之间的关系确定出臂架末端的目标线速度。
27.在上述技术方案中,臂架回转台包括臂架回转马达,控制模块具体用于基于臂架末端目标线速度和臂架末端实际线速度控制臂架回转马达的供油量。
28.在该技术方案中,臂架回转台包括臂架回转马达,控制模块具体用于基于臂架末端目标线速度和臂架末端实际线速度控制臂架回转马达的供油量。
29.在上述技术方案中,第一获取模块具体用于获取臂架末端当前位置信息和回转台角速度,并根据回转台角速度和臂架末端当前位置信息计算出臂架末端的实际线速度。
30.在该技术方案中,第一获取模块具体用于获取臂架末端当前位置信息和回转台角速度,并根据回转台角速度和臂架末端当前位置信息计算出臂架末端的实际线速度。
31.在上述技术方案中,第一获取模块具体用于:获取臂架末端与回转台回转中心线的距离,臂架末端与回转台回转中心线的距离即为臂架末端当前位置信息;或获得臂架末端当前角度,基于获取的角度计算出臂架末端当前位置信息。
32.在该技术方案中,第一获取模块具体用于获取臂架末端与回转台回转中心线的距离,臂架末端与回转台回转中心线的距离即为臂架末端当前位置信息;或获得臂架末端当前角度,基于获取的角度计算出臂架末端当前位置信息。本技术对臂架末端当前位置信息的获取并不限于此,还可以采用其他的方式获取。
33.本发明第三方面的技术方案提供了一种可读存储介质,其上存储有程序或指令,程序或指令被执行时,实现如第一方面技术方案中的臂架回转控制方法的步骤。
34.根据本发明提供的可读存储介质,由于其包括第一方面技术方案提供的臂架回转控制方法。因此,本发明提供的可读存储介质具有第一方面技术方案提供的臂架回转控制方法的全部有益效果,在此不在赘述。
35.本发明第四方面的技术方案提供了一种臂架系统,包括回转台;第一传感器,对应回转台设置,用于测量回转台的角速度;臂架组件,设置在回转台上,回转台能够带动臂架组件进行转动,臂架组件包括至少一个臂节,多个臂架之间转动连接;位置信息确定装置,设置在臂架组件上,用于确定臂架末端当前位置信息;如第二方面技术方案中的臂架回转控制装置,臂架回转控制装置与回转台、第一传感器和位置信息确定装置分别连接,或第三方面技术方案中的可读存储介质。
36.根据本发明提供的臂架系统,包括回转台、第一传感器、臂架组件和位置信心确定装置。第一传感器与回转台对应设置,能够测量回转台的角速度。臂架组件设置在回转台上,从而回转台能够带动臂架组件进行转动,其中,臂架组件包括至少一个臂节,当臂节为
多个时,多个臂节之间转动连接设置。位置信息确定装置设置在臂架组件上,能够确定臂架末端当前的位置信息。并且,由于其臂架系统包括第二方面技术方案中的臂架回转控制装置,臂架回转控制装置与回转台、第一传感器和位置信息确定装置分别连接,或第三方面技术方案中的可读存储介质,因此,该臂架系统具有第二方面技术方案中的臂架回转控制装置,或第三方面技术方案中的可读存储介质的全部有益效果,在此不再赘述。
37.在上述技术方案中,臂架系统还包括:臂架回转马达,用于驱动回转台转动。
38.在该技术方案中,臂架系统还包括臂架回转马达,臂架回转马达能够驱动回转台转动,从而带动臂架系统进行工作。
39.在上述技术方案中,位置信息确定装置包括第二传感器组,设置在臂架组件上,用于测量臂架的所有臂节角度。
40.在该技术方案中,位置信息确定装置包括第二传感器组,设置在臂架组件上,用于测量臂架的所有臂节角度,进而根据测量出的臂节角度来计算出臂节末端的位置。
41.本发明第五方面的技术方案提供了一种作业车辆,包括第四方面技术方案中的臂架系统。
42.根据本发明提供的作业车辆,由于其包括第四方面技术方案中的臂架系统。因此,本发明提供的作业车辆具有第四方面技术方案中的臂架系统的全部有益效果,在此不在赘述。
43.本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
附图说明
44.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
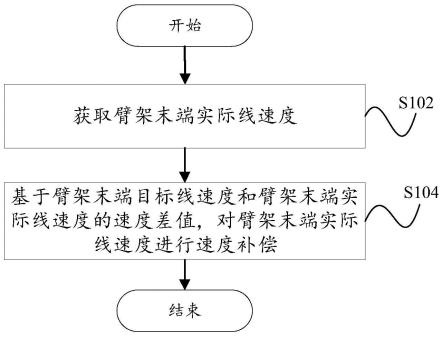
45.图1是本发明的一个实施例提供的臂架回转控制方法的流程示意图;
46.图2是本发明的另一个实施例提供的臂架回转控制方法的流程示意图;
47.图3是本发明的第三个实施例提供的臂架回转控制方法的流程示意图;
48.图4是本发明的一个实施例的臂架回转控制方法的臂架末端目标线速度与实际线速度的关系示意图;
49.图5是示出了本发明对臂架回转台的转速进行pid反馈调节时的原理示意图;
50.图6是本发明的实施例提供的臂架回转控制装置的方框图;
51.图7是本发明的实施例提供的臂架系统的方框图。
52.其中,图5至图7中的附图标记与部件名称之间的对应关系为:
53.1回转台,2臂架,3第一获取模块,4控制模块,42第二获取模块,44计算模块,46pid调节模块,5第一传感器,6臂架组件,7位置信息确定装置。
具体实施方式
54.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施例方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
55.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
56.实施例一
57.如图1所示,本发明第一个实施例提供了一种臂架回转控制方法。包括:
58.s102,获取臂架末端实际线速度。
59.s104,基于臂架末端目标线速度和臂架末端实际线速度的速度差值,对臂架末端实际线速度进行速度补偿。
60.根据本发明提供的臂架回转控制方法,包括:获取臂架末端实际线速度;基于臂架末端目标线速度和臂架末端的实际线速度的速度差值,对臂架末端实际线速度进行速度补偿。本技术通过对臂架末端的实际线速度进行速度补偿,进而控制臂架的回转台转动,形成闭环控制回路,并能够进行反馈调节,使得臂架末端实际线速度与目标线速度相同,从而通过线速度来控制臂架转动,使得臂架旋转时更加的平顺,不同的操作人员进行操作时,也能够达到相同的旋转速度,简化了操作手的旋转操控要求,且相比于现有方案还解决了臂架电流设置过小引起的臂架回转不动作问题。这里的补偿可以是正值,也可以是负值,当臂架末端的实际线速度小于目标线速度时,对其进行正值补偿,当臂架末端的实际线速度大于目标线速度时,对其进行负值补偿。
61.其中,基于臂架末端目标线速度和臂架末端实际线速度控制臂架回转台转动的步骤具体为:计算出臂架末端目标线速度和臂架末端实际线速度的差值,基于差值对臂架末端实际线速度进行反馈调节,从而实现对臂架末端实际线速度的反馈调节,直到臂架末端的实际线速度达到臂架末端目标线速度。
62.实施例二
63.如图2和图4所示,本发明第二个实施例提供了一种臂架回转控制方法。包括:
64.s202,获取臂架末端实际线速度。
65.s204,获取臂架末端目标线速度。
66.s206,计算臂架末端目标线速度和臂架末端实际线速度的速度差值。
67.s208,基于速度差值对臂架回转台的转速进行pid反馈调节,直到臂架末端实际线速度与臂架末端目标线速度相同。
68.根据本发明提供的臂架回转控制方法,包括:获取臂架末端实际线速度;获取臂架末端目标线速度;基于臂架末端目标线速度和臂架末端的实际线速度的速度差值,对臂架末端实际线速度进行速度补偿。通过获取臂架末端目标线速度和臂架末端实际线速度,并计算出两者的差值,基于两者的差值对臂架回转台的转速进行pid反馈调节,直到臂架末端实际线速度与臂架末端目标线速度相同。本技术通过对臂架末端目标线速度和臂架末端的实际线速度的速度差值进行补偿,进而控制臂架的回转台转动,形成闭环控制回路,并能够进行反馈调节,使得臂架旋转时更加的平顺,不同的操作人员进行操作时,也能够达到相同的旋转速度,简化了操作手的旋转操控要求,且相比于现有方案还解决了臂架电流设置过小引起的臂架回转不动作问题。如图3中可以看出臂架末端实际线速度和目标线速度的关系(图中v表示的是臂架末端的转动速度,t表示的是臂架末端转动的时间)。
69.在上述实施例中,获取臂架末端目标线速度的步骤包括:获取操作手柄的张开角
度;基于操作手柄的张开角度与线速度之间的关系确定出臂架末端的目标线速度。
70.在该实施例中,获取臂架末端目标线速度的步骤包括:获取操作手柄的张开角度,并基于操作手柄的张开角度与目标线速度之间的关系,从而确定出臂架末端的目标线速度。该种设置,根据操作手柄的张开角度与线速度之间的关系,确定出臂架末端的目标线速度,从而就能够根据操作手柄的张开角度与臂架末端的目标线速度的关系来控制臂架的转动,从而使得不同的操作人员操作时都能够根据手柄的张开角度来使臂架的线速度达到相同。
71.在上述实施例中,臂架回转台包括臂架回转马达,基于速度差值对臂架回转台的转速进行pid反馈调节步骤包括:基于速度差值控制臂架回转马达的供油量,以对臂架回转台的转速进行pid反馈调节。
72.在该实施例中,臂架回转台包括臂架回转马达,能够基于速度差值控制臂架回转马达的供油量,从而对臂架回转台的转速进行pid反馈调节。其中,回转台的转动是通过控制电流的大小,从而控制臂架回转马达的供油量,使臂架回转台转动。
73.在上述任一实施例中,获取臂架末端实际线速度的步骤包括:获取臂架末端当前位置信息和回转台角速度;根据回转台角速度和臂架末端当前位置信息计算出臂架末端的实际线速度。
74.在该些实施例中,获取臂架末端实际线速度的步骤包括:获取臂架末端当前位置信息和回转台角速度。根据回转台角速度和臂架末端当前位置信息计算出臂架末端的实际线速度,从而根据实际线速度和臂架末端目标线速度对臂架驱动装置进行控制。
75.在上述实施例中,获取臂架末端当前位置信息的步骤包括:获取臂架末端与回转台回转中心线的距离,臂架末端与回转台回转中心线的距离即为臂架末端当前位置信息;或获取臂架的臂节角度,基于获取的臂节角度计算出臂架末端当前位置信息。
76.在该实施例中,获取臂架末端当前位置信息的步骤包括:获取臂架末端与回转台回转中心线的距离,臂架末端与回转台回转中心线的距离即为臂架末端当前位置信息;或获取臂架的臂节角度,基于获取的臂节角度能够计算出臂架末端当前的位置信息。从而通过当前位置信息和回转台的角速度计算出臂架末端目标线速度。
77.实施例三
78.如图3和图5所示,本发明第三个实施例提供了一种臂架回转控制方法。包括:
79.s302,获取臂架末端实际线速度。
80.s304,获取操作手柄的张开角度。
81.s306,基于操作手柄的张开角度与线速度之间的关系确定出臂架末端的目标线速度。
82.s308,计算臂架末端目标线速度和臂架末端实际线速度的速度差值。
83.s310,基于速度差值对臂架回转台的转速进行pid反馈调节,直到臂架末端实际线速度与臂架末端目标线速度相同。
84.根据本发明提供的臂架回转控制方法,包括:获取臂架末端实际线速度;获取操作手柄的张开角度;基于操作手柄的张开角度与线速度之间的关系确定出臂架末端的目标线速度;计算臂架末端目标线速度和臂架末端实际线速度的速度差值;基于速度差值对臂架回转台的转速进行pid反馈调节,直到臂架末端实际线速度与臂架末端目标线速度相同。通
过获取臂架末端目标线速度和臂架末端实际线速度,并计算出两者的差值,基于两者的差值对臂架回转台的转速进行pid反馈调节,直到臂架末端实际线速度与臂架末端目标线速度相同。本技术通过对臂架末端目标线速度和臂架末端的实际线速度的速度差值进行补偿,进而控制臂架的回转台转动,形成闭环控制回路,并能够进行反馈调节,使得臂架旋转时更加的平顺,不同的操作人员进行操作时,也能够达到相同的旋转速度,简化了操作手的旋转操控要求,且相比于现有方案还解决了臂架电流设置过小引起的臂架回转不动作问题。
85.在上述实施例中,获取臂架末端实际线速度的步骤包括:获取臂架末端当前位置信息和回转台角速度;根据回转台角速度和臂架末端当前位置信息计算出臂架末端的实际线速度。
86.在上述实施例中,臂架回转台包括臂架回转马达,基于速度差值对臂架回转台的转速进行pid反馈调节步骤包括:基于速度差值控制臂架回转马达的供油量,以对臂架回转台的转速进行pid反馈调节。
87.在该实施例中,臂架回转台包括臂架回转马达,能够基于速度差值控制臂架回转马达的供油量,从而对臂架回转台的转速进行pid反馈调节。其中,回转台的转动是通过控制电流的大小,从而控制臂架回转马达的供油量,使臂架回转台转动。
88.在上述任一实施例中,获取臂架末端实际线速度的步骤包括:获取臂架末端当前位置信息和回转台角速度;根据回转台角速度和臂架末端当前位置信息计算出臂架末端的实际线速度。
89.在该些实施例中,获取臂架末端实际线速度的步骤包括:获取臂架末端当前位置信息和回转台角速度。根据回转台角速度和臂架末端当前位置信息计算出臂架末端的实际线速度,从而根据实际线速度和臂架末端目标线速度对臂架驱动装置进行控制。
90.在上述实施例中,获取臂架末端当前位置信息的步骤包括:获取臂架末端与回转台回转中心线的距离,臂架末端与回转台回转中心线的距离即为臂架末端当前位置信息;或获取臂架的臂节角度,基于获取的臂节角度计算出臂架末端当前位置信息。
91.在该实施例中,获取臂架末端当前位置信息的步骤包括:获取臂架末端与回转台回转中心线的距离,臂架末端与回转台回转中心线的距离即为臂架末端当前位置信息;或获取臂架的臂节角度,基于获取的臂节角度能够计算出臂架末端当前的位置信息。从而通过当前位置信息和回转台的角速度计算出臂架末端目标线速度。
92.如图6所示,本发明第二方面的实施例提供了一种臂架回转控制装置,包括第一获取模块3,用于获取臂架末端实际线速度;控制模块4,用于基于臂架末端目标线速度和臂架末端实际线速度的速度差值,对所述臂架末端实际线速度进行速度补偿。能够实现本发明第一方面任一实施例提供的臂架回转控制方法的步骤。因此,该臂架回转控制装置具有第一方面实施例中的臂架回转控制方法的全部有益效果,在此不再赘述。
93.在上述实施例中,控制模块4包括:第二获取模块42,用于获取所述臂架末端目标线速度;计算模块44,用于计算臂架末端目标线速度和臂架末端实际线速度的差值;pid调节模块46,用于基于速度差值对臂架回转台1的转速进行pid反馈调节,直到臂架末端实际线速度与臂架末端目标线速度相同。
94.在上述实施例中,第二获取模块42包括:获取子模块,用于获取操作手柄的张开角
度;关系确定子模块,用于基于操作手柄的张开角度与目标线速度之间的关系确定出臂架末端的目标线速度。
95.在上述实施例中,臂架回转台1包括臂架回转马达,控制模块4具体用于基于臂架末端目标线速度和臂架末端实际线速度控制臂架回转马达的供油量。
96.在该实施例中,臂架回转台1包括臂架回转马达,控制模块4具体用于基于臂架末端目标线速度和臂架末端实际线速度控制臂架回转马达的供油量。
97.在上述实施例中,第一获取模块3具体用于获取臂架末端当前位置信息和回转台1角速度,并根据回转台1角速度和臂架末端当前位置信息计算出臂架末端的实际线速度。
98.在该实施例中,第一获取模块3具体用于获取臂架末端当前位置信息和回转台1角速度,并根据回转台1角速度和臂架末端当前位置信息计算出臂架末端的实际线速度。
99.在上述实施例中,第一获取模块3具体用于:获取臂架末端与回转台1回转中心线的距离,臂架末端与回转台1回转中心线的距离即为臂架末端当前位置信息;或获得臂架末端当前角度,基于获取的角度计算出臂架末端当前位置信息。
100.在该实施例中,第一获取模块3具体用于获取臂架末端与回转台1回转中心线的距离,臂架末端与回转台1回转中心线的距离即为臂架末端当前位置信息;或获得臂架末端当前角度,基于获取的角度计算出臂架末端当前位置信息。本技术对臂架末端当前位置信息的获取并不限于此,还可以采用其他的方式获取。
101.本发明第三方面的实施例提供了一种可读存储介质,其上存储有程序或指令,程序或指令被执行时,实现如第一方面实施例中的臂架回转控制方法的步骤。
102.根据本发明提供的可读存储介质,由于其包括第一方面实施例提供的臂架回转控制方法。因此,本发明提供的可读存储介质具有第一方面实施例提供的臂架回转控制方法的全部有益效果,在此不在赘述。
103.如图7所示,本发明第四方面的实施例提供了一种臂架系统,包括回转台1;第一传感器5,对应回转台1设置,用于测量回转台1的角速度;臂架组件6,设置在回转台1上,回转台1能够带动臂架组件6进行转动,臂架组件6包括至少一个臂节,多个臂架2之间转动连接;位置信息确定装置7,设置在臂架组件6上,用于确定臂架末端当前位置信息;如第二方面实施例中的臂架回转控制装置,臂架回转控制装置与回转台1、第一传感器5和位置信息确定装置7分别连接,或第三方面实施例中的可读存储介质。
104.根据本发明提供的臂架系统,包括回转台1、第一传感器5、臂架组件6和位置信心确定装置。第一传感器5与回转台1对应设置,能够测量回转台1的角速度。臂架组件6设置在回转台1上,从而回转台1能够带动臂架组件6进行转动,其中,臂架组件6包括至少一个臂节,当臂节为多个时,多个臂节之间转动连接设置。位置信息确定装置7设置在臂架组件6上,能够确定臂架末端当前的位置信息。并且,由于其臂架系统包括第二方面实施例中的臂架回转控制装置,臂架回转控制装置与回转台1、第一传感器5和位置信息确定装置7分别连接,或第三方面实施例中的可读存储介质,因此,该臂架系统具有第二方面实施例中的臂架回转控制装置,或第三方面实施例中的可读存储介质的全部有益效果,在此不再赘述。
105.在上述实施例中,臂架系统还包括:臂架回转马达,用于驱动回转台1转动。
106.在该实施例中,臂架系统还包括臂架回转马达,臂架回转马达能够驱动回转台1转动,从而带动臂架系统进行工作。
107.在上述实施例中,位置信息确定装置7包括第二传感器组,设置在臂架组件6上,用于测量臂架2的所有臂节角度。
108.在该实施例中,位置信息确定装置7包括第二传感器组,设置在臂架组件6上,用于测量臂架2的所有臂节角度,进而根据测量出的臂节角度来计算出臂节末端的位置。
109.本发明第五方面的实施例提供了一种作业车辆,包括第四方面实施例中的臂架系统。
110.根据本发明提供的作业车辆,由于其包括第四方面技术方案中的臂架系统。因此,本发明提供的作业车辆具有第四方面技术方案中的臂架系统的全部有益效果,在此不在赘述。
111.在本说明书的描述中,术语“连接”、“安装”、“固定”等均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
112.在本说明书的描述中,需要理解的是,术语“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或单元必须具有特定的方向、以特定的方位构造和操作,因此,不能理解为对本发明的限制。
113.在本说明书的描述中,术语“一个实施例”、“一些实施例”、“具体实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
114.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。