技术特征:
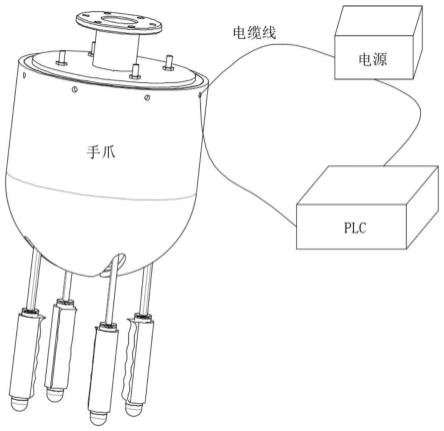
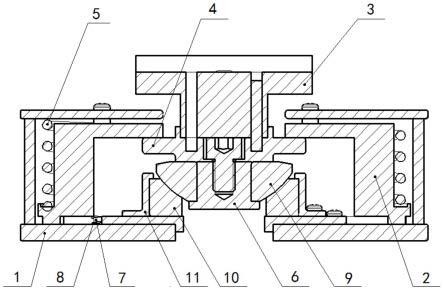
1.一种电磁驱动的多指柔性机械手爪,其特征在于,所述多指柔性机械手爪包括连接模块、若干个手指模块以及控制模块、电源模块;所述连接模块包括连接盘(3)、电磁屏蔽罩(4)以及若干个与手指模块一一对应的连接杆(2);所述连接盘(3)固定连接在电磁屏蔽罩(4)的顶口处,连接杆(2)沿连接盘(3)的周向均匀分布,并且均与连接盘(3)固定相连;所述手指模块包括电磁铁(5)、摆杆(6)、滑杆(7)、夹套(8)以及拉伸弹簧(11),所述摆杆(6)的顶端与连接杆(2)的底端铰接,并且摆杆(6)的下部伸出至电磁屏蔽罩(4)之外;所述电磁铁(5)装在摆杆(6)的上部,并且处在电磁屏蔽罩(4)之内,所述滑杆(7)套接在所述摆杆(6)的下端,可沿摆杆(6)上下滑动;所述夹套(8)紧套在滑杆(7)上;所述拉伸弹簧(11)一端与电磁屏蔽罩(4)连接,一端与电磁铁(5)连接;所述控制模块plc控制器(9),电源模块包括电源(10),所述plc控制器(9)通过控制通入电磁铁(5)的电流方向来实现手爪开合;所述电源(10)用来给电磁铁(5)供电。2.根据权利要求1所述的一种电磁驱动的多指柔性机械手爪,其特征在于,所述电磁屏蔽罩(4)采用高磁导率材料制作。3.根据权利要求1所述的一种电磁驱动的多指柔性机械手爪,其特征在于,所述手指模块具有4个或4个以上,分为若干对,并且沿连接盘中心轴线呈对称布置。4.根据权利要求1所述的一种电磁驱动的多指柔性机械手爪及,其特征在于,所述plc控制器(9)给相邻手指模块的电磁铁(5)同时通入方向相反的直流电时,手指模块收拢;给所有手指模块的电磁铁(5)同时通入方向相同的直流电时,手指模块张开。5.根据权利要求1所述的一种电磁驱动的多指柔性机械手爪及其控制,其特征在于,所述手指模块的滑杆(7)可沿摆杆(6)上下滑动,初始状态时滑杆(7)处于摆杆(6)的最下端,当手爪下降滑杆(7)触碰到工作台面或物料时,滑杆(7)可沿摆杆(6)向上滑动。6.根据权利要求1-5任一所述的一种电磁驱动的多指柔性机械手爪,其特征在于,所述电磁屏蔽罩(4)的底部开设有多个与摆杆(6)一一对应的径向滑槽,所述连接杆(2)的中部贯穿所述径向滑槽。7.根据权利要求1-5任一所述的一种电磁驱动的多指柔性机械手爪,其特征在于,所述夹套(8)采用弹性材料制成,并且夹套(8)朝向连接盘轴心的端面上开设有多道沟槽。8.根据权利要求1-5任一所述的一种电磁驱动的多指柔性机械手爪,其特征在于,所述滑杆(7)内开设有凹型导轨;所述摆杆(6)的底端固定连接有与凹型导轨适配的滑块,并且凹型导轨的顶部固定连接有套接所述摆杆(6)的限位环。9.根据权利要求8所述的一种电磁驱动的多指柔性机械手爪,其特征在于,所述凹型导轨的截面为非圆形。10.一种权利要求1所述的电磁驱动的多指柔性机械手爪的控制方法,其特征在于,通过plc控制器(9)控制通入每个电磁铁(5)的电流方向;当给相邻手指模块上的电磁铁(5)通入方向相反的直流电时,相邻电磁铁5之间磁极相反,使得电磁铁(5)之间相互吸引,带动手指模块相互靠拢,从而夹取物体;当给所有电磁铁(5)通入方向相同的直流电时,所有电磁铁(5)磁极相同,使得电磁铁5之间相互排斥,手指模块相互分离,从而释放物体;当所有电磁铁(5)失电时,手指模块在重力和弹簧拉力作用下自由张开,复位到初始状态。
技术总结
本发明公开了一种电磁驱动的多指柔性机械手爪及其控制方法,涉及机械手爪领域,提出一种手指长短可自适应调节、电磁驱动的柔性机械手爪,可抓取不同材料、形状、大小与放置姿态的物料。包括连接模块、若干个手指模块、控制模块和电源模块;所述连接模块包括连接盘、电磁屏蔽罩以及多个与手指模块一一对应的连接杆;所述手指模块包括电磁铁、摆杆、滑杆、拉伸弹簧以及夹套。抓取物料时,当手爪下降到预定位置时,控制模块PLC控制相邻手指模块上的电磁铁通入方向相反的直电流,夹住物料;当手爪夹取物料移动到指定位置后,控制模块PLC控制所有手指模块上的电磁铁通入方向相同的直电流,释放物料。手爪结构与控制简单,生产成本低,可靠性高。性高。性高。
技术研发人员:叶文华 张权 马庭田 梁睿君 冷晟 陈西忍 张朝宏
受保护的技术使用者:南京航空航天大学
技术研发日:2022.02.28
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。