1.本发明涉及车辆技术领域,尤其涉及一种基于路况复杂等级的疲劳驾驶预警方法、系统及计算机可读存储介质。
背景技术:
2.目前,为了提高驾驶员的行车安全,防止驾驶员疲劳驾驶,通常对驾驶员的持续行驶时间进行检测,当检测到驾驶员的持续行驶时间达到一个预设值时,就需要提醒驾驶员休息或采取一些安全措施以尽可能地保护驾驶员的驾驶安全。
3.面对不同的路况变化,驾驶员的情绪、注意力集中程度往往不同,驾驶员在一些复杂路况下行驶时,往往需要更加集中注意力驾驶而且能短时间内保持精神状态,例如驾驶员在凹凸不平、路况多变等较为复杂的路况下行驶时,驾驶员往往能在车辆震动、大脑刺激下较好的集中注意力,保持精神状态,对路况进行分析思考。然而由于高强度思考,驾驶员能坚持的最大持续行驶时间其实会相应缩短,尤其是驾驶员由复杂路况转变到在无拥堵的高度公路上等为简单的路况下行驶时,大脑神经会由紧绷状态进入相对放松状态,再加上平缓的路况下车辆相对平稳行驶,更容易让驾驶员犯困。若采用现有技术的方案,按照一定的预设值作为最大持续行驶时间,往往不能符合驾驶员的真实最大持续行驶时间,不能及时的提醒驾驶员休息或采取相应安全措施。
技术实现要素:
4.本发明所要解决的技术问题在于,提供一种基于路况复杂等级的疲劳驾驶预警方法、系统和计算机可读介质,以解决现有技术中没有结合路况信息仅对驾驶时间进行判断而不能及时提醒驾驶员休息或采取相应安全措施的问题。
5.为了解决上述技术问题,本发明一方面提供一种基于路况复杂等级的疲劳驾驶预警方法,包括:
6.确定车辆当前行驶的第一路况对应的第一复杂等级,并获取驾驶员在所述第一复杂等级的路况下的第一持续行驶时间;
7.根据所述第一路况和所述第一复杂等级确定车辆已行驶的第二路况和所述第二路况对应的第二复杂等级,并获取驾驶员在所述第二复杂等级的路况下的第二持续行驶时间,其中所述第二路况为车辆行驶过程中,按照车辆行驶路况的先后顺序,与所述第一路况最近的路况,并且所述第二路况对应的所述第二复杂等级不同于所述第一复杂等级;
8.判断所述第二复杂等级是否高于所述第一复杂等级,若是,则根据所述第二持续行驶时间确定驾驶员在所述第一复杂等级的路况下的最大持续行驶时间,
9.判断所述第一持续时间是否大于所述最大持续行驶时间,若是,则发送疲劳驾驶预警指令,用于控制车辆执行疲劳驾驶预警。
10.在一具体实施方式中,所述方法还包括:
11.获取驾驶员的当前驾驶状态信息、驾驶员在每一复杂等级的路况下的累计行驶时间和每一所述复杂等级对应的时间权重;
12.根据所述驾驶员状态信息、累计行驶时间和时间权重确定驾驶员的第一疲劳等级;
13.根据所述第一疲劳等级调整所述最大持续行驶时间。
14.在一具体实施方式中,所述根据所述第一疲劳等级调整所述最大持续行驶时间具体包括:
15.判断所述第一持续行驶时间是否小于所述最大持续行驶时间,若是,则判断所述第一疲劳等级是否大于第一预设疲劳等级,若是,则减小所述最大持续行驶时间。
16.在一具体实施方式中,所述根据所述第一疲劳等级调整所述最大持续行驶时间具体包括:
17.判断所述第一持续行驶时间是否小于最大持续行驶时间,若是,则判断所述第一疲劳等级是否小于第二预设疲劳等级,若是,则增大所述最大持续行驶时间。
18.在一具体实施方式中,所述根据所述驾驶员状态信息、累计行驶时间和时间权重确定驾驶员的第一疲劳等级具体包括:
19.根据所述驾驶员的当前驾驶状态信息确定所述驾驶员的第二疲劳等级;
20.根据所述累计行驶时间和时间权重确定驾驶员的第三疲劳等级;
21.根据所述第二疲劳等级和所述第三疲劳等级确定所述第一疲劳等级。
22.在一具体实施方式中,所述根据所述第二疲劳等级和所述第三疲劳等级确定所述第一疲劳等级具体包括:
23.若所述第二疲劳等级高于所述第三疲劳等级,则确定所述第二疲劳等级为所述第一疲劳等级;
24.若所述第二疲劳等级低于所述第三疲劳等级,则确定所述第三疲劳等级为所述第一疲劳等级。
25.在一具体实施方式中,所述确定车辆当前行驶的第一路况对应的第一复杂等级具体包括:
26.采集驾驶员在当前行驶的第一路况的预设时间段内的车辆操作频率和车辆在所述预设时间段内的最大震动幅度和震动频率;
27.根据所述车辆操作频率、最大震动幅度和震动频率确定车辆当前行驶的第一路况对应的第一复杂等级。
28.本发明另一方面提供一种基于路况等级的疲劳驾驶预警系统,包括:
29.第一复杂等级确定单元,用于确定车辆当前行驶的第一路况对应的第一复杂等级;
30.第一持续行驶时间获取单元,用于获取驾驶员在所述第一复杂等级的路况下的第一持续行驶时间;
31.第二复杂等级确定单元,用于根据所述第一路况和所述第一复杂等级确定车辆行驶的第二路况和所述第二路况对应的第二复杂等级,其中;
32.第二持续行驶时间获取单元,用于获取驾驶员在所述第二复杂等级的路况下的第二持续行驶时间;
33.最大持续时间确定单元,用于判断所述第二复杂等级是否高于所述第一复杂等级,若是,则根据所述第二持续行驶时间确定驾驶员在所述第一复杂等级的路况的最大持续行驶时间;
34.疲劳驾驶预警确定单元,用于判断所述第一持续时间是否大于所述最大持续行驶时间,若是,则发送疲劳驾驶预警指令,用于控制执行疲劳驾驶预警。
35.在一具体实施方式中,所述系统还包括:
36.信息获取单元,用于获取驾驶员的当前驾驶状态信息、驾驶员在每一复杂等级的路况下的累计行驶时间和每一所述复杂等级对应的时间权重;
37.第一疲劳等级确定单元,用于根据所述驾驶员状态信息、累计行驶时间和时间权重确定驾驶员的第一疲劳等级;
38.最大可持续行驶时间调整单元,用于根据所述第一疲劳等级调整所述最大持续行驶时间。
39.本发明还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现前述方法的步骤。
40.本发明实施例的有益效果在于:通过确定车辆当前行驶的路况对应的第一复杂等级以及驾驶员在所述第一复杂等级下的持续行驶时间,根据第一复杂等级获取第二复杂等级以及驾驶员在第二复杂等级下的持续行驶时间,在第二复杂等级大于第一复杂等级的情况下,根据第二持续行驶时间确定驾驶员在第一复杂等级下的最大持续行驶时间,若所述第一持续行驶时间大于最大持续行驶时间,则生成疲劳驾驶预警指令,控制车辆执行疲劳预警驾驶。该方法考虑了不同路况下驾驶员的精力消耗对最大持续行驶时间的影响,能实现在路况由复杂变为相对简单时,调整用于触发疲劳驾驶预警执行的最大持续行驶时间,及时的提醒驾驶员休息或采取相应的安全措施。
附图说明
41.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
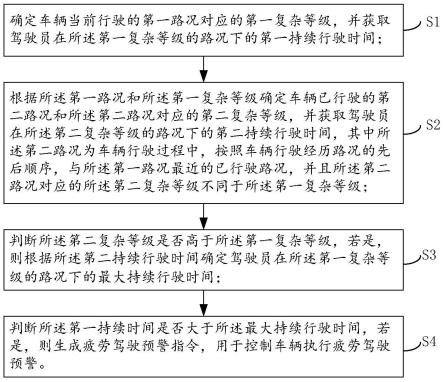
42.图1是本发明实施例一种基于路况复杂等级的疲劳驾驶预警方法的流程示意图。
具体实施方式
43.以下各实施例的说明是参考附图,用以示例本发明可以用以实施的特定实施例。
44.以下参照图1所示,本发明实施例一提供一种基于路况复杂等级的疲劳驾驶预警方法,包括如下步骤:
45.s1、确定车辆当前行驶的第一路况对应的第一复杂等级,并获取驾驶员在所述第一复杂等级的路况下的第一持续行驶时间。
46.具体地,确定车辆当前行驶的第一路况对应的复杂等级,根据确定的复杂等级从预设的若干个复杂等级中获得车辆的当前第一路况对应的第一复杂等级。实时计算驾驶员在所述第一复杂等级的路况下的第一持续行驶时间。
47.在一具体实施方式中,确定车辆当前行驶的第一路况对应的第一复杂等级具体包括:
48.a、采集车辆在当前第一路况的行驶过程中车辆在预设时间段内的最大震动幅度、最大震动频率以及驾驶员在所述预设时间段内的车辆操作频率。
49.具体地,通过传感器检测车辆在预设时间段内的最大震动幅度和震动频率。最大震动幅度和震动频率能间接反映路况复杂程度。
50.具体地,通过传感器检测驾驶员在预设时间段内的车辆操作频率,驾驶员在预设时间段内的车辆操作包括驾驶员控制转向灯、踩油门、踩加速板、调节档位等操作。车辆驾驶员的车辆操作频率在一定程度上间接反映驾驶员的思考强度和路况复杂程度。
51.b、根据所述最大震动幅度、震动频率和车辆操作频率确定车辆当前行驶的第一路况对应的第一复杂等级。
52.在一具体实施方式中,将车辆操作频率a、最大震动幅度b和最大震动频率c作为输入特征,输入预先训练的神经网络模型,通过神经网络模型计算获得对应的复杂等级。
53.在一具体实施方式中,还可以将车辆操作频率a、最大震动幅度b和最大震动频率c做为索引条件,通过查表的方式查询a、b、c所对应的复杂等级,从而获得第一复杂等级。
54.s2、根据所述第一路况和所述第一复杂等级确定车辆已行驶的第二路况和所述第二路况对应的第二复杂等级,并获取驾驶员在所述第二复杂等级的路况下的第二持续行驶时间,其中所述第二路况为车辆行驶过程中,按照车辆行驶经历路况的先后顺序,与所述第一路况最近的已行驶路况,并且所述第二路况对应的所述第二复杂等级不同于所述第一复杂等级。
55.具体地,所述第二复杂等级为按照车辆行驶所经历的路况的先后顺序,与当前路况最接近的且对应的复杂等级与所述第一复杂等级不同的前一路况所对应的复杂等级。
56.举例说明,假设车辆在一道路上行驶,当前时刻是行驶的第3个小时,前2个小时的路况为a等级,后面1个小时的路况为b等级,那么后面1小时对应的路况为第一路况,第一复杂等级为b等级,前面两小时对应的路况为第二路况,第二复杂等级就是a等级,第一持续时间就是1小时,第二持续时间就是2小时。
57.s3、判断所述第二复杂等级是否高于所述第一复杂等级,若是,则根据所述第二持续行驶时间确定驾驶员在所述第一复杂等级的路况下的最大持续行驶时间。
58.在一具体实施方式中,可以根据所述第二持续行驶时间通过查找表格来确定最大持续行驶时间,其中,所述表格中已存有所述第二持续行驶时间与所述最大持续行驶时间的对应关系。
59.在一具体实施方式中,还可以预先通过实验测试获得多组所述第二持续时间和与所述第二持续时间对应的最大持续行驶时间数据,根据所述多组数据拟合出一个用于计算最大持续行驶时间的数学模型,然后基于获取的第二持续行驶时间通过所述数学模型来计算最大持续行驶时间。
60.s4、判断所述第一持续行驶时间是否大于所述最大持续行驶时间,若是,则发送疲劳驾驶预警指令,用于控制车辆执行疲劳驾驶预警。
61.当第一持续行驶时间大于所述最大持续行驶时间,则说明驾驶员疲劳,驾驶员需要休息,因而生成疲劳驾驶预警指令,控制车辆执行疲劳驾驶预警。
62.在一具体实施方式中,所述方法还包括:
63.s5、获取驾驶员的当前驾驶状态信息、驾驶员在每一复杂等级的路况下的累计行驶时间和每一所述复杂等级对应的时间权重。
64.具体地,驾驶员的驾驶状态信息包括驾驶员在预设时间段内的生理特征信息,其中,生理特征信息包括预设时间段内驾驶员的眨眼次数、头部下坠次数、眼睛闭合程度等,当然也还可以包括驾驶员的心率、脑电波等参数。具体地,获取驾驶员在每一个复杂等级的路况下的累计行驶时间,以及预设的每一个复杂等级所对应的时间权重。例如,驾驶员在复杂等级为高、中、低的路况下的累计行驶时间分别为t1、t2、t3,复杂等级为“高”、“中”、“低”对应的时间权重为a1、a2、a3。
65.s6、根据所述驾驶员状态信息、累计行驶时间和时间权重确定驾驶员的第一疲劳等级。
66.具体地,根据驾驶员状态信息从若干个疲劳等级中确定出第二疲劳等级,根据每一所述复杂等级的路况下的累计行驶时间和所述复杂等级所对应的时间权重计算驾驶员的待分析时间,根据待分析时间从若干个预设的疲劳等级中确定出第三疲劳等级,根据第二疲劳等级和第三疲劳等级确定第一疲劳等级。
67.在一具体实施方式中,若驾驶员在复杂等级为高、中、低的路况下的累计行驶时间分别为t1、t2、t3,复杂等级为“高”、“中”、“低”对应的时间权重为a1、a2、a3,则待分析时间t为:t=t1*a1 t2*a2 t3*a3。
68.在一具体实施方式中,若第二疲劳等级高于第三疲劳等级,则将第二疲劳等级确定为第一疲劳等级,若第二疲劳等级低于第三疲劳等级,则将第三疲劳等级确定为第一疲劳等级。
69.在一具体实施方式中,如果若干个预设的疲劳等级以数值表示,数值越大代表越疲劳,则为每一预设的疲劳等级预先分配一个对应的权值,确定所述第一疲劳等级所对应的权值,获得第一权值,确定第二疲劳等级所对应的权值,获得第二权值,根据第一疲劳等级、第一权值、第二疲劳等级和第二权值计算获得第三疲劳等级。若通过该计算方法计算出来的第三疲劳等级不适预设的疲劳等级,则将第三疲劳等级修正为大于计算值中最小值。例如,预设5个疲劳等级分别用1、2、3、4、5表示,若第三疲劳等级的计算值为3.4,则从大于3.4的疲劳等级4和5中,选取最小的4,修正第三疲劳等级为4。
70.s7、根据所述第一疲劳等级调整所述最大持续行驶时间。
71.具体地,当所述第一持续时间未达到所述最大持续行驶时间时,若所述第三疲劳等级大于第一预设疲劳等级,则减小所述最大持续行驶时间。
72.具体地,当所述第一持续时间未达到所述最大持续行驶时间时,若所述第三疲劳等级小于第二预设疲劳等级,则增大所述最大持续行驶时间。
73.由于驾驶员精神状态逐渐变差的过程中,其判断能力、应变路况的能力都会逐渐变弱,但是驾驶员的精神状态又没有达到需要休息来恢复的程度,因此根据第一疲劳等级来控制车辆直行安全机制,就是为了在这一过程中给驾驶员的安全提供一定的保障,因为驾驶员的精神状态不同,其接管紧急路况的反应时间就需要越长,所以可以控制车辆的上限车速或者车距等,来为驾驶员提供与其疲劳状态相符合的接管时间。
74.本发明实施例的基于路况等级的疲劳驾驶预警方法,通过确定车辆当前行驶的路
况对应的第一复杂等级以及驾驶员在所述第一复杂等级下的持续行驶时间,根据第一复杂等级获取第二复杂等级以及驾驶员在第二复杂等级下的持续行驶时间,在第二复杂等级大于第一复杂等级的情况下,根据第二持续行驶时间确定驾驶员在第一复杂等级下的最大持续行驶时间,若所述第一持续行驶时间大于最大持续行驶时间,则生成疲劳驾驶预警指令,控制车辆执行疲劳预警驾驶。该方法考虑了不同路况下驾驶员的精力消耗对最大持续行驶时间的影响,能实现在路况由复杂变为相对简单时,调整用于触发疲劳驾驶预警执行的最大持续行驶时间,及时的提醒驾驶员休息或采取相应的安全措施。
75.基于本发明实施例一,本发明实施例二提供一种基于路况复杂等级的疲劳驾驶预警系统,包括第一复杂等级确定单元、第一持续行驶时间获取单元、第二复杂等级确定单元、第二持续行驶时间获取单元、最大持续时间确定单元、疲劳驾驶预警确定单元,其中,第一复杂等级确定单元用于确定车辆当前行驶的第一路况对应的第一复杂等级;第一持续行驶时间获取单元用于获取驾驶员在所述第一复杂等级的路况下的第一持续行驶时间;第二复杂等级确定单元用于根据所述第一路况和所述第一复杂等级确定车辆行驶的第二路况和所述第二路况对应的第二复杂等级,其中,所述第二路况为车辆行驶过程中,按照车辆行驶经历路况的先后顺序,与所述第一路况最近的已行驶路况,并且所述第二路况对应的所述第二复杂等级不同于所述第一复杂等级;第二持续行驶时间获取单元用于获取驾驶员在所述第二复杂等级的路况下的第二持续行驶时间;最大持续时间确定单元用于判断所述第二复杂等级是否高于所述第一复杂等级,若是,则根据所述第二持续行驶时间确定驾驶员在所述第一复杂等级的路况的最大持续行驶时间;疲劳驾驶预警确定单元用于判断所述第一持续时间是否大于所述最大持续行驶时间,若是,则发送疲劳驾驶预警指令,用于控制执行疲劳驾驶预警。
76.在一具体实施方式中,所述系统还包括信息获取单元、第一疲劳等级确定单元和最大可持续行驶时间调整单元,其中,信息获取单元用于获取驾驶员的当前驾驶状态信息、驾驶员在每一复杂等级的路况下的累计行驶时间和每一所述复杂等级对应的时间权重;第一疲劳等级确定单元用于根据所述驾驶员状态信息、累计行驶时间和时间权重确定驾驶员的第一疲劳等级;最大可持续行驶时间调整单元用于根据所述第一疲劳等级调整所述最大持续行驶时间。
77.在一具体实施方式中,所述最大可持续行驶时间调整单元用于判断所述第一持续行驶时间是否小于所述最大持续行驶时间,若是,则判断所述第一疲劳等级是否大于第一预设疲劳等级,若是,则减小所述最大持续行驶时间。
78.在一具体实施方式中,所述最大可持续行驶时间调整单元判断所述第一持续行驶时间是否小于最大持续行驶时间,若是,则判断所述第一疲劳等级是否小于第二预设疲劳等级,若是,则增大所述最大持续行驶时间。
79.基于本发明实施例一,本发明实施例三还提供一种计算机可读介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现前述方法的步骤。
80.有关本实施例的工作原理以及所带来的有益效果请参照本发明实施例一的说明,此处不再赘述。
81.以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。