1.本发明涉及自动驾驶汽车领域的一种高级驾驶员辅助系统,涉及一种受驾驶员心理负荷影响引起的车道偏移量的计算方法。
背景技术:
2.车道保持辅助驾驶系统是控制车辆的行驶方向,使车辆自动行驶在当前车道上,进而减轻驾驶员的操纵负担,提高驾驶安全性与舒适性。车道保持辅助驾驶系统主要由显示器、摄像头、控制器以及传感器组成,当车道偏离系统开启时,摄像头会时刻采集行驶车道的标识线,通过图像处理获得汽车在当前车道中的位置参数,当检测到汽车即将偏离车道时,传感器会及时收集车辆数据和驾驶员的操作状态,之后由控制器自动控制方向盘系统,恢复行驶方向。
3.l2级别自动驾驶是属于部分自动驾驶,基本操作是由车辆完成,而驾驶员负责周边监控和随时接管车辆,在全部行驶全过程中,驾驶人员一定要集中注意力,实时监控系统周边安全驾驶自然环境随时随地准备对接车子。l2级别自动驾驶车辆主要包括功能有acc自动巡航、自动跟车、自动泊车等等。
技术实现要素:
4.车辆在行驶的过程中车道保持受驾驶员主观思想活动的影响,而驾驶员在驾驶过程中的主观思想活动很大程度上受旁边车道车辆行驶状态影响。本发明提供了一种考虑驾驶员心理感受的辅助驾驶车辆行驶线确定方法,通过研究驾驶员受旁边车辆影响所产生的心理负荷从而引起车道偏移进行研究,对车道保持技术提供决策支持。
5.为了达成上述发明目的,本发明提出的一种由于驾驶员心理负荷引起l2级自动驾驶车辆车道偏移量的计算方法,包括以下步骤:
6.步骤s1:通过分析确定目标车辆在行驶过程中影响驾驶员心理负荷的主要因素。
7.通过车道保持系统中识别模块获取行驶车道宽度,驾驶车辆相对车道线的位置,偏离方向和速度确定目标车辆车道偏移量的范围其中w记为车道宽度,w记为目标车辆宽度,ε为测量误差ε
→
0。
8.影响驾驶员心理感受的主要因素包含质量、速度、体积、车辆数。其中目标车辆质量记为mn,左车道车辆质量记为m
li
(i≥0),右车道车辆质量记为m
rj
(j≥0);目标车辆速度记为vn,左车道车辆速度记为v
li
,右车道车辆速度记为v
rj
;目标车辆体积记为qn,左车道车辆体积记为q
li
,右车道车辆体积记为q
rj
,单位左车道车辆数记为n
l
,单位右车道车辆数记为nr。
9.步骤s2:对驾驶员受左右车道车辆影响产生的心理负荷进行量化,分别提出质量压迫力函数、速度压迫力函数、体积压迫力函数来分别量化车辆质量、速度、体积给予驾驶员心理负荷的大小。
10.其中质量压迫力函数fm记为:其中λ1(dev)∈c为质量压迫力常量,p
l
为左车道车辆离目标车辆左车道线距离,l
l
为目标车辆离左车道线距离,且p l>0。
11.速度压迫力函数fv记为:fv=[λ2(dev)
·
vn·vl(s)i(j)
·
|v
l(s)i(j)-vn|],
[0012]
其中λ2(dev)∈c为速度压迫力常量。
[0013]
体积压迫力函数fq记为:fq=λ3(dev)
·qn
·ql(s)i(j)
[0014]
其中λ3(dev)∈c为体积压迫力常量。
[0015]
步骤s3:将驾驶员所受心理压迫力划分为动能压迫力与视觉压迫力。
[0016]
其中压迫动能ea记为
[0017][0018]
动能压迫力函数fa记为
[0019][0020]
其中ka>0。
[0021]
动能压迫度记为oa记为其中f
amax
>0,oa∈[0,1]。
[0022]
视觉压迫力函数fb记为
[0023][0024]
视觉适应度ob记为:
[0025]
其中kb>0f
amax
>0,ob∈[0,1]。
[0026]
步骤s4:利用直觉模糊混合平均算子(ifha)对左右车道车辆进行信息集成。
[0027]
满足直觉模糊属性,为一组直觉模糊数。直觉模糊数sj(j=1,2,...,n)组成的直觉模糊集s记为
[0028][0029]
其中ωj=(ω1,ω2,...,ωn)为sj(j=1,2,...,n)的权重向量ωj∈[0,1]。
[0030]
权重向量加权直觉模糊数
[0031]
求加权直觉模糊数的得分函数,其中则sj的得分函数:其中,π
l(r)j
为直觉模糊集犹豫度,
[0032]
对加权直觉模糊数sj的得分函数从大到小进行排序,得到一组新的直觉模糊数
[0033]
确定有序加权平均算子权重其中vi=(v1,v2...vn)为排序后的加权直觉模糊数组的加权向量;
[0034]
步骤五;进行ifha算子的集成,得到集成后的速度压迫度i
l(r)a
与视觉适应度i
l(r)b
。
[0035]
ifha算子的集成公式记为
[0036][0037]
步骤s5:最后利用集成后的左右车道动能压迫度与视觉适应度,求出车道偏移的方向及偏移量大小。车道视觉密度为单位车道长度下的车辆数,单位左车道视觉密度记为ρ
l
,单位右车道视觉密度记为ρr。其中单位左车道视觉密度单位右车道视觉密度则左车道车辆对驾驶员的心理压迫度记为
[0038]
同理右车道车辆对驾驶员心理压迫度为
[0039][0040]
车道偏移量其中α>0向右偏移α
<0向左偏移。
[0041]
车辆在行驶的过程中车道保持受驾驶员主观思想活动的影响,而驾驶员在驾驶过程中的主观思想活动很大程度上受旁边车道车辆行驶状态影响。本发明通过研究驾驶员受旁边车辆影响所产生的心理负荷从而引起车道偏移进行研究,量化驾驶员心理负荷对车道偏移量的影响大小,对车道保持技术提供决策支持。
附图说明
[0042]
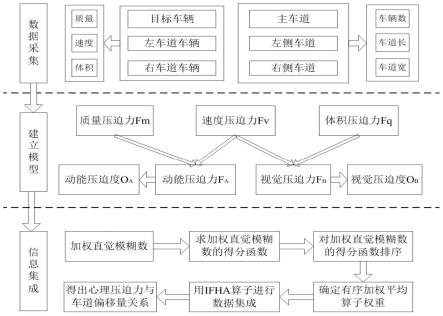
附图1是本发明的流程图。
[0043]
附图2是目标车辆行驶平面图。
具体实施方式
[0044]
以下将结合附图1,对本发明的技术方案进行详细说明
[0045]
如图1所示,本发明目的是提供了一种受驾驶员心理负荷影响,l2级自动驾驶汽车车道偏移量的计算方法。主要包含数据采集,建立模型,信息集成三步进行。其具体实施步骤如下:
[0046]
步骤s1:首先确定研究目标道路与目标车辆,对研究所需数据进行采集,所需信息如图2所示。
[0047]
主要采集的数据主要包含,车道信息与车辆信息。通过车道保持系统中识别模块搜集所需信息。取单位车道长度作为实验路段,获取车道宽度w,目标车辆宽度w。
[0048]
影响驾驶员心理负荷的主要因素包含质量,速度,体积,车辆数。其中目标车辆质量记为mn,左车道车辆质量记为m
li
(i≥0),右车道车辆质量记为m
rj
(j≥0);目标车辆速度记为vn,左车道车辆速度记为v
li
,右车道车辆速度记为v
rj
;目标车辆体积记为qn,左车道车辆体积记为q
li
,右车道车辆体积记为q
rj
;单位左车道车辆数记为n
l
,单位右车道车辆数记为nr。
[0049]
步骤s2:其次对提出的模型进行计算,根据本专利权利要求书3所示分别计算左右车道的质量压迫力,速度压迫力,体积压迫力;
[0050]
步骤s3:根据本专利权利要求书4,计算驾驶员所受压迫力划分为动能压迫力与视觉压迫力,分别计算压迫动能ea,动能压迫力函数fa与动能压迫度oa,视觉压迫力函数fb与视觉适应度ob。
[0051]
步骤s4:根据本专利权利要求书5,对驾驶员的动能压迫度与视觉适应度组成的直觉模糊集进行集成,得到左右车道集成后的速度压迫度与视觉适应度。
[0052]
步骤s5:根据本专利权利要求书6,计算左右车道视觉密度,利用集成后的左右车道动能压迫度与视觉适应度,求出车道偏移量大小。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
