技术特征:
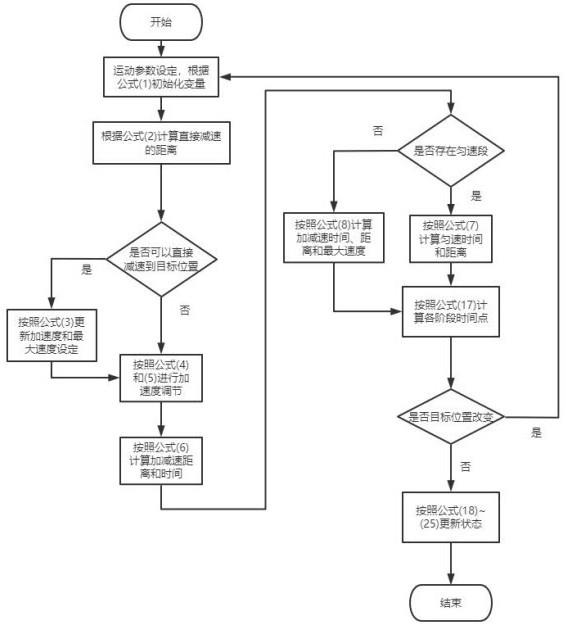
1.一种兼容运动中目标位置更新的s型曲线规划方法,其特征在于,包括以下步骤:将曲线规划分为7个阶段:加速段的加加速度段,加速段的匀加速段,加速段的减加速段,匀速段,减速段的加加速度段,减速段的匀加速段,减速段的减加速段;设定并初始化曲线规划的运动参数;根据运动参数计算曲线规划中直接减速的距离,并判断是否可以直接减速;依据判断结果计算加速到最大速度的加速时间t
acc
和加速距离s
acc
;根据所述加速时间t
acc
和加速距离s
acc
计算各阶段的时间点;实时检测是否有新的目标位置,若否,则根据时间点更新曲线规划各阶段状态;若是,则返回至初始步骤重新规划。2.根据权利要求1所述的方法,其特征在于,所述设定并初始化曲线规划的运动参数包括:设定新的目标位置p
e1
、当前位置p
s
、移动距离s、最大速度v
m
、平均加速度a和曲线规划各阶段的时间点如下:加速段的加加速度段t
0-t1,加速段的匀加速段t
1-t2,加速段的减加速段t
2-t3,匀速段t
3-t4,减速段的加加速度段t
4-t5,减速段的匀加速段t
5-t6,减速段的减加速段t
6-t7;初始化运动参数:其中,t为当前时刻,v
t
为t时刻实时速度,a
t
为t时刻实时加速度,s
t
为t时刻实时运动距离,p
t
为t时刻实时位置,v0为初始速度。3.根据权利要求2所述的方法,其特征在于,所述根据运动参数计算曲线规划中直接减速的距离s
dec1
,公式如下:,其中,β为减速段与加速段的平均加速度的比值,且0<β≤1。4.根据权利要求3所述的方法,其特征在于,所述判断是否可以直接减速具体如下:若s<s
dec1
,则最大速度v
m
和平均加速度a数值分别取其相反数,否则不变。5.根据权利要求4所述的方法,其特征在于,所述依据判断结果计算加速到最大速度的加速时间t
acc
和加速距离s
acc
,公式如下:。6.根据权利要求5所述的方法,其特征在于,根据所述加速时间t
acc
和加速距离s
acc
计算各阶段的时间点包括:判断是否存在匀速段,计算匀速时间t
avg
和匀速距离s
avg
:若abs(s)>abs(s
acc
s
dec
),则存在匀速段,公式如下: ,
若abs(s)≤abs(s
acc
s
dec
),则不存在匀速段,公式如下:s
avg
= 0,t
avg
= 0,并重新计算能够到达的最大速度v
m
、加速时间t
acc
和减速时间t
dec
以及对应的加速距离s
acc
、减速距离s
dec
,公式如下:;根据加速时间t
acc
、匀速时间t
avg
和减速时间t
dec
计算各阶段的时间点,公式如下:,其中,k为减速段或加速段内的最大加速度与平均加速度的比值且1<k≤2。7.根据权利要求5或6所述的方法,其特征在于,所述依据判断结果计算加速到最大速度的加速时间t
acc
和加速距离s
acc
中,设定加加速度平均值j
m
,引入加速段调节因子α,且存在如下关系式:,当 时,重新计算加速到最大速度的加速时间t
acc
和加速距离s
acc
、最大速度减速到0对应的减速时间t
dec
和减速距离s
dec
,公式如下:。8.根据权利要求7所述的方法,其特征在于,若abs(s)≤abs(s
acc
s
dec
),则能够到达的最大速度v
m
、加速时间t
acc
和减速时间t
dec
以及对应的加速距离s
acc
、减速距离s
dec
,公式如下:
。9.根据权利要求8所述的方法,其特征在于,所述实时检测是否有新的目标位置,若否,则根据时间点更新曲线规划各阶段状态;若是,则返回至初始步骤重新规划具体为:以dt为时间间隔,时间t从t0累加至t7,检测是否有新的目标位置,若有,返回至初始步骤重新规划;若没有,整个曲线规划过程的实时加加速度j
t
、实时加速度α
t
、实时速度ν
t
更新公式如下:第一段:,第二段:,第三段:,第四段: ,第五段:
ꢀ
,第六段:,第七段: ,整个曲线规划过程中的实时运动距离s
t
和实时位置p
t
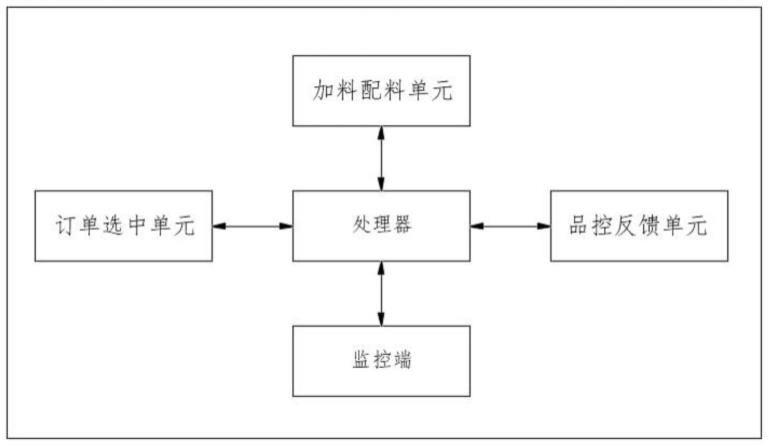
更新为:。10.一种兼容运动中目标位置更新的s型曲线规划系统,其特征在于,包括:划分模块,用于将曲线规划分为7个阶段:加速段的加加速度段,加速段的匀加速段,加速段的减加速段,匀速段,减速段的加加速度段,减速段的匀加速段,减速段的减加速段;运动参数模块,用于设定并初始化曲线规划的运动参数;判断模块,用于根据运动参数计算曲线规划中直接减速的距离,并判断是否可以直接减速;计算模块,用于依据判断结果计算加速到最大速度的加速时间t
acc
和加速距离s
acc
;时间点模块,用于根据所述加速时间t
acc
和加速距离s
acc
计算各阶段的时间点;检测更新模块,用于实时检测是否有新的目标位置,若否,则根据时间点更新曲线规划各阶段状态;若是,则返回至初始步骤重新规划。11.一种贴片机,其特征在于,包括存储器,存储有程序;处理器,用于执行所述存储器中的所述程序,以实现权利要求1-9中任意一项所述方法的步骤;驱动器,用于响应所述曲线规划过程,以实现贴片机的实际运动控制。
技术总结
本发明涉及贴片机控制技术领域,具体公开了一种兼容运动中目标位置更新的S型曲线规划方法及系统,所述方法包括以下步骤:将曲线规划分为7个阶段;设定并初始化曲线规划的运动参数;根据运动参数计算曲线规划中直接减速的距离,并判断是否可以直接减速;依据判断结果计算加速到最大速度的加速时间和加速距离;根据所述加速时间和加速距离计算各阶段的时间点;实时检测是否有新的目标位置,若否,则根据时间点更新曲线规划各阶段状态;若是,则返回至初始步骤重新规划。本发明支持带有初速度的曲线规划,兼容运动过程中目标位置改变后直接进行重新位置曲线规划,有效提高了生产效率。有效提高了生产效率。有效提高了生产效率。
技术研发人员:任贵平 孙海星 郭恩政 许礼昆 金长明 董宁
受保护的技术使用者:合肥安迅精密技术有限公司
技术研发日:2022.05.11
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。