具有改进的氧气存储的氧气箱
1.相关申请的交叉引用
2.本技术要求2019年11月27日提交的美国临时专利申请第62/941,500号的优先权和权益,在此通过引用将其全部内容并入本文。
技术领域
3.本发明总体上涉及便携式氧浓缩器(poc),并且更具体地涉及通过含有吸附材料的氧气箱而具有改进的氧气存储的氧浓缩器。
背景技术:
4.有许多用户需要补充氧气作为长期氧气治疗(ltot)的一部分。目前,接受ltot的绝大多数用户被诊断为属于慢性阻塞性肺病(copd)的一般类别。一般诊断包括慢性支气管炎、肺气肿和相关肺部疾病等常见疾病。其他用户也可能需要补充氧气,例如维持升高活动水平的肥胖个体,患有囊性纤维化的用户或患有支气管肺发育不良的婴儿。
5.医生可以为这些用户开出氧浓缩器或便携式医用氧气箱的处方。通常规定特定的连续氧气流速(例如,1升每分钟(lpm)、2lpm、3lpm等)。该领域的专家还认识到,锻炼为这些用户提供了长期的好处,可以减缓疾病的进展,提高生活质量并延长用户的寿命。然而,大部分固定形式的锻炼,例如踏车和固定自行车,对于这些患者来说是过于费力的。因此,人们早就认识到需要移动性。直到最近,这种移动性已经通过使用安装在具有小推车轮的手推车上的小型压缩氧气箱或气瓶而变得容易。这些箱的缺点是它们包含有限量的氧,它们较重,当安装时重量约为50磅。
6.氧浓缩器已经使用了约50年,以通过富氧气体向患有呼吸功能不全的用户提供补充氧气。用于提供这些流速的传统氧浓缩器体积庞大且笨重,使得普通的走动活动变得困难且不切实际。近来,制造大型固定式家用氧浓缩器的公司开始开发便携式氧浓缩器(poc)。poc的优点在于它们理论上可以无限供应富氧气体。为了使这些装置更小用于移动性,生产富氧空气所需的各种系统都被浓缩了。
7.氧浓缩器可以实施诸如真空摆动吸附(vsa)、压力摆动吸附(psa)或真空压力摆动吸附(vpsa)的产生富氧空气。例如,摆动吸附(psa)涉及使用压缩机来增加罐(称为筛床)内的气体压力,罐包含气体分离吸附剂的颗粒,气体分离吸附剂比氧更强烈地吸引氮气。环境空气通常包括大约78%的氮气和21%的氧气,余量由氩气、二氧化碳、水蒸气和其他痕量气体组成。如果进料气体混合物例如空气在压力下通过含有气体分离吸附剂的筛床或罐,气体分离吸附剂比氧更强烈地吸引氮,则部分或全部氮将被吸附剂吸附,并且从罐出来的气体将富含氧。当吸附剂达到其吸附氮气的能力的终点时,吸附的氮气可以通过排气解吸。然后罐准备好进行另一“循环”以产生富氧空气。通过在双罐系统中交替罐,一个罐可以浓缩氧气(所谓的“吸附阶段”),而另一个罐被净化(“净化阶段”)。这种交替导致氧气与氮气几乎连续地分离。以这种方式,氧气可以积聚在例如储存容器或其他联接到气罐的可加压容器或导管中,用于各种用途,包括向用户提供补充氧气。关于氧浓缩器的更多细节可以在例
如2009年3月12日公开的题为“氧浓缩器装置和方法”的美国公开专利申请no.2009-0065007中找到,其通过引用并入本文。
8.真空摆动吸附(vsa)提供了替代的气体分离技术。vsa通常使用真空装置通过筛床的分离过程抽取气体,该真空例如配置为用筛床产生真空的压缩机。真空摆动吸附(vpsa)可理解为使用组合的真空和加压技术的混合系统。例如,vpsa系统可以对用于分离过程的筛床加压,并且还施加真空以净化床。
9.poc中使用的气体分离吸附剂对水具有非常高的亲和力。这种亲和力是如此之高以至于它克服了氮亲和力,并且因此当在进料气体流(如环境空气)中水蒸气和氮两者都可用时,吸附剂将优先吸附水蒸气而不是氮。此外,当其被吸附时,水不像氮那样容易解吸。结果,水分子甚至在再生之后仍保持吸附,并因此阻挡氮的吸附位点。因此,随着时间和使用,水累积在吸附剂上,这对于氮吸附变得越来越低效,达到需要更换筛床的程度,因为不能再获得所需纯度的富氧空气或不能进行进一步的氧浓缩。这种筛床可称为耗尽或失活的。
10.在便携式氧浓缩器(poc)中,在筛床(罐)和患者输送系统之间使用氧气箱/储存器,以便储存由筛床产生的氧气。由于其便携性,便携式氧浓缩器(poc)设计紧凑。因此,所有部件被设计成尽可能占用最小空间。氧气箱是poc中的一个部件,其用于存储产生的待输送给患者的富氧空气。该箱通常设计得较小,因此,随着每个病人吸入富氧空气,箱压力会显著下降。进而,经历了筛床压力下降,导致空气分离(即,氧富集)的进一步问题,并因此导致氧富集空气的氧纯度损失。
11.需要poc来增加氧气箱的容量,氧气箱中具有气体吸附材料。还需要一种用于氧浓缩器的氧气箱,其在不增加箱的尺寸的情况下提高了存储容量。还需要一种具有较高存储容量的氧气箱,以最小化氧气箱中压力变化的影响。
技术实现要素:
12.为了克服氧浓缩器中箱压力的下降导致对氧气能力的限制,本文描述了一种氧气箱,其在氧气箱中包括气体吸附材料,以提高由氧浓缩器产生的富氧空气在箱中的存储容量。
13.一个公开的示例是用于积聚来自氧浓缩装置的富氧空气的箱。氧浓缩装置包括具有氮吸附材料的罐和联接到罐的压缩机。压缩机压缩空气用于罐在摆动吸附过程中产生富氧空气。箱包括联接到罐的入口。封闭容器通过入口收集罐中产生的富氧空气。容器中的出口允许用户吸入所收集的富氧气体。容器内的吸附材料吸附从罐添加到箱中的富氧空气。
14.在所公开的示例性箱的另一实现方式中,吸附材料为颗粒形式。在另一种实现方式中,箱包括用于容纳吸附材料的过滤容器。过滤容器防止吸附材料到达出口。在另一种实现方式中,吸附材料为固体块形式。在另一种实现方式中,吸附材料是由以下组成的组中的一种:碳分子筛、沸石、石墨、活性炭或金属有机骨架。
15.另一个公开的示例是氧浓缩器设备,其具有:包括氮吸附材料的罐;和压缩系统,其包括联接到罐的压缩机。压缩机压缩空气用于罐在摆动吸附过程中产生富氧空气。箱具有联接到罐的入口以收集在罐中产生的富氧空气。箱包括允许用户吸入收集的富氧空气的用户出口。箱包括在容器内的吸附材料,以吸附从罐添加到箱中的富氧空气。
16.在所公开的示例性设备的另一实现方式中,吸附材料为颗粒形式。在另一种实现
方式中,该设备包括用于容纳吸附材料的过滤容器。过滤容器防止吸附材料到达出口。在另一实现方式中,吸附材料为固体单块形式。在另一种实现方式中,吸附材料是由以下组成的组中的一种:碳分子筛、沸石、石墨、活性炭或金属有机骨架。在另一种实现方式中,该设备包括一组阀,该组阀调节压缩空气到罐的流量。设备还包括控制器,控制器被配置来控制该组阀的操作,以产生进入箱中的富氧空气。在另一种实现方式中,设备是便携式氧浓缩器。
17.另一个公开的示例是增加用于存储来自氧浓缩装置的富氧空气的箱的容量的方法。氧浓缩装置包括含有氮吸附材料的罐和联接到罐的压缩机。压缩机压缩空气用于罐在摆动吸附过程中产生富氧空气。箱包括出口以允许用户吸入所储存的富氧气体。将吸附材料加入到箱中。在罐中产生的富氧空气通过入口收集在箱中。吸附材料吸附富氧空气。
18.在所公开的示例性方法的另一实现方式中,吸附材料为颗粒形式。在另一实现方式中,方法包括添加过滤器容器以保持吸附材料。过滤容器防止吸附材料到达出口。在另一种实现方式中,吸附材料为固体块形式。在另一种实现方式中,吸附材料是由以下组成的组中的一种:碳分子筛、沸石、石墨、活性炭或金属有机骨架。
19.以上概述并非旨在表示本发明的每个实施方案或每个方面。更确切地说,前述发明内容仅提供本文阐述的一些新颖方面和特征的示例。当结合附图和所附权利要求书时,本发明的上述特征和优点以及其他特征和优点将从用于实施本发明的代表性实施方案和模式的以下详细描述中变得显而易见。
附图说明
20.从以下对示范性实施例的描述连同参考附图将更好地理解本发明,在附图中:
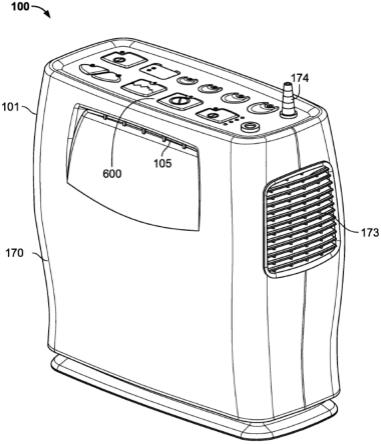
21.图1a描绘了根据本技术的一种形式的氧浓缩器;
22.图1b是图1a的氧浓缩器的气动系统的示意图;
23.图1c是图1a的氧浓缩器的主要部件的侧视图;
24.图1d是图1a的氧浓缩器的压缩系统的透视侧视图;
25.图1e是包括热交换导管的压缩系统的侧视图;
26.图1f是图1a的氧浓缩器的示例性出口部件的示意图;
27.图1g描绘了用于图1a的氧浓缩器的出口导管;
28.图1h描绘了用于图1a的氧浓缩器的替代出口导管;
29.图1i是用于图1a的氧浓缩器的分解的罐系统的透视图;
30.图1j是图1i的罐系统的端视图;
31.图1k是图1j中所示的罐系统端部的组装视图;
32.图1l是图1i的罐系统相对图1j和图1k所描绘的罐系统的相对端的视图;
33.图1m是图1l中所示的罐系统端部的组装视图;
34.图1n描绘了用于图1a的氧浓缩器的示例性控制面板;
35.图2a是具有颗粒形式的吸附材料的氧浓缩器的示例性氧气箱的截面图;以及
36.图2b是具有块形式的吸附材料的氧浓缩器的示例性氧气箱的截面图;
37.本发明容许各种修改和替代形式。已经在附图中以示例的方式示出了一些代表性实施例,并且将在本文中对其进行详细描述。然而,应当理解,本发明并不限于所公开的特定形式。相反,本发明将覆盖落入由所附权利要求限定的本发明的精神和范围内的所有修
改、等同物和替代物。
具体实施方式
38.本发明可以以许多不同的形式实施。代表性实施例在附图中示出,并且将在本文中详细描述。本发明是本发明的原理的示例或说明,并且不旨在将本发明的广义方面限于所说明的实施方案。就此而言,例如在摘要、发明内容和详细描述部分中公开的但未在权利要求书中明确阐述的要素和限制不应通过隐含、推论或其他方式单独地或共同地并入权利要求书中。为了本详细描述的目的,除非特别声明,单数包括复数,反之亦然;并且词语“包括”意指“包括但不限于”。此外,例如,在本文中可使用近似词,诸如“大约”、“几乎”、“基本上”、“约”等,以表示“处于”、“接近”、或“接近处于”、或“在
…
3-5%内”或“在可接受的制造公差内”或其任何逻辑组合。
39.本发明涉及一种氧浓缩器,其包括具有吸附材料的氧气箱。氧气箱中的吸附材料通过允许更多的富氧空气存储在箱中而抵消了从箱中吸入富氧空气所造成的压力损失。它还提高了氧气箱的存储容量并使氧气箱中压力变化的影响最小化。
40.可以结合附图的示例考虑涉及氧浓缩器的本技术的示例性储氧装置。本技术的示例可以用以下结构和操作中的任一个来实现。
41.图1a至1n示出了氧浓缩器100的实现方式。氧浓缩器100可在空气流中浓缩氧气以向用户提供富氧空气。氧浓缩器100可以是便携式氧浓缩器。例如,氧浓缩器100可具有允许氧浓缩器用手和/或在携带箱中携带的重量和尺寸。在一种实现方式中,氧浓缩器100具有小于约20磅、小于约15磅、小于约10磅、或小于约5磅的重量。在一种实现方式中,氧浓缩器100具有小于约1000立方英寸、小于约750立方英寸、小于约500立方英寸、小于约250立方英寸、或小于约200立方英寸的体积。
42.如本文所述,氧浓缩器100使用摆动吸附(psa)工艺(其是循环的)来产生富氧空气。然而,在其他实现方式中,氧浓缩器100可以被修改成使得它使用循环真空摆动吸附(vsa)过程或循环真空摆动吸附过程(vpsa)来产生富氧空气。
43.图1a描绘了氧浓缩器100的外壳170的实现方式。在一些实现方式中,外壳170可以由轻质塑料构成。外壳170包括:压缩系统入口105,在外壳170的每一端的冷却系统被动入口101和出口173,出口174和控制面板600。入口101和出口173允许冷却空气进入壳体,流过壳体,并离开壳体170的内部,以帮助冷却氧浓缩器100。压缩系统入口105允许空气进入压缩系统。出口174用于附接导管以向用户提供由氧浓缩器100产生的富氧空气。
44.图1b示出了根据实现方式的诸如氧浓缩器100的氧浓缩器的气动系统的示意图。气动系统可将氧气集中在空气流中,以将富氧空气提供给出口系统(如下所述)。
45.富氧空气可以通过对罐302和304中的环境空气加压而由环境空气产生,罐包含气体分离吸附剂并因此被称为筛床。可用于氧浓缩器中的气体分离吸附剂能够从空气流中至少分离氮气以产生富氧空气。气体分离吸附剂的示例包括能够从空气流中分离氮气的分子筛。可用于氧浓缩器中的吸附剂的示例包括但不限于沸石(天然的)或合成的结晶铝硅酸盐,其在高压下从空气流中分离氮气。可使用的合成结晶铝硅酸盐的示例包括但不限于:oxysiv吸附剂,购自环球油品公司(uop llc),伊利诺斯州德斯普兰斯(des plaines);sylobead吸附剂,购自w.r.grace&co,马里兰州哥伦比亚;siliporite吸附剂,购自
cecas.a.,法国巴黎;zeochem吸附剂,购自zeochem ag,瑞士uetikon;和aglilsx吸附剂,购自空气化工产品有限公司(air products and chemicals),宾夕法尼亚州艾伦镇。
46.如图1b所示,空气可以通过空气入口105进入气动系统。空气可以通过压缩系统200吸入空气入口105。压缩系统200可以从氧浓缩器的周围吸入空气并压缩空气,迫使压缩空气进入罐302和304中的一个或两个。在一种实现方式中,入口消声器108可以联接到空气入口105,以减少由压缩系统200将空气吸入氧浓缩器所产生的声音。在一种实现方式中,入口消声器108可以减少湿气和声音。例如,吸水材料(例如聚合物吸水材料或沸石材料)可用于从进入的空气中吸收水,并降低进入空气入口105的空气的声音。
47.压缩系统200可包括被配置来压缩空气的一个或多个压缩机。由压缩系统200产生的加压空气可以供给到罐302和304中的一个或两个中。在一些实现方式中,环境空气可以在罐中加压到大约在13-20磅/平方英寸表压(psig)范围内的目标压力。根据设置在罐中的气体分离吸附剂的类型,也可以使用其他目标压力值。
48.如图1b所示,在具体公开的实现方式中,氧浓缩器100具有至少两个罐302和304。联接到每个罐302和304的是入口阀122和124以及出口阀132和134。如图1b所示,入口阀122联接到罐302的“进料端”,入口阀124联接到罐304的进料端。出口阀132联接到罐302,出口阀134联接到罐304。入口阀122和124用于控制从压缩系统200到相应罐的空气通道。出口阀132和134用于将排气从相应的罐302和304排放到大气中。在一些实现方式中,入口阀122和124以及出口阀132和134可以是硅柱塞电磁阀。然而,也可以使用其他类型的阀。柱塞阀通过变得安静和具有低滑动提供了优于其他类型阀的优点。
49.在一些实现方式中,可以产生两级阀致动电压来控制入口阀122和124以及出口阀132和134。例如,可以将高电压(例如24v)施加到入口阀以打开入口阀。然后可以降低电压(例如,降低到7v)以保持入口阀打开。使用较小的电压来保持阀打开可以使用较小的功率。这种电压的降低使热积累和功耗最小化,以延长来自电源180(下面描述)的运行时间。当切断对阀的力时,其通过弹簧作用而关闭。在一些实现方式中,电压可以作为时间的函数来施加,这不一定是阶跃响应(例如,在初始24v与最终7v之间的弯曲向下电压)。
50.在一种实现方式中,控制器400电联接到阀122、124、132和134。控制器400包括一个或多个处理器410,其可操作以执行存储在存储器420中的程序指令。程序指令配置控制器以执行用于操作氧浓缩器的各种预定方法,如在此更详细描述的方法。程序指令可以包括用于产生彼此异相地操作入口阀122和124的程序指令,即,当入口阀122或124中的一个打开时,另一个阀关闭。在罐302的加压过程中,出口阀132关闭而出口阀134打开。类似于入口阀,出口阀132和134彼此异相地操作。在一些实现方式中,用于打开输入和输出阀的电压和电压的持续时间可以由控制器400控制。控制器400还可以包括收发器430,其可以与外部装置通信以发送由处理器410收集的数据或从外部装置接收用于处理器410的指令。
51.止回阀142和144分别联接到罐302和304的“产品端”。止回阀142和144可以是单向阀,罐被加压和排气时出现的压力差被动操作的单向阀,或者可以是主动阀。止回阀142和144联接到罐,以允许在每个罐的加压过程中产生的富氧空气流出罐,并阻止富氧空气或任何其他气体回流到罐中。以这种方式,止回阀142和144用作单向阀,允许富氧空气在加压过程中离开相应的罐。
52.这里使用的术语“止回阀”是指允许流体(气体或液体)沿一个方向流动并阻止流
体回流的阀。术语“流体”可以包括气体或气体混合物(例如空气)。适合使用的止回阀的示例包括但不限于:球形止回阀;隔膜止回阀;蝶形止回阀;摆动止回阀;鸭嘴阀;伞形阀;以及提升止回阀。在压力下,加压环境空气中的氮分子被加压罐中的气体分离吸附剂吸附。当压力增加时,更多的氮气被吸附,直到罐中的气体富含氧气。当压力达到足以克服联接到罐的止回阀的阻力的点时,未吸附的气体分子(主要是氧气)流出加压罐。在一种实现方式中,止回阀在向前方向上的压降小于1psi。反方向的破裂压力大于100psi。然而,应当理解,一个或多个部件的修改将改变这些阀的操作参数。如果前向流压力增加,通常会减少富氧空气的产生。如果用于反向流的破裂压力降低或设定得太低,则通常存在富氧空气压力的降低。
53.在示例性实现方式中,罐302由在压缩系统200中产生的压缩空气加压并通入罐302中。在罐302的加压期间,入口阀122打开,出口阀132关闭,入口阀124关闭且出口阀134打开。当出口阀132关闭时,出口阀134打开,以允许罐302被加压时允许罐304基本上同时排放到大气中。一段时间之后,罐302中的压力足以打开止回阀142。在罐302中产生的富氧空气通过止回阀142,并且在一种实现方式中,被收集在积聚器106中。
54.在另外一段时间之后,罐302中的气体分离吸附剂变得被氮气饱和并且不能从进入的空气中分离大量的氮气。这一点通常在富氧空气产生的预定时间之后达到。在上述实现方式中,当罐302中的气体分离吸附剂达到该饱和点时,停止压缩空气的流入,并将罐302排气以除去氮气。在罐302的排气过程中,入口阀122关闭,而出口阀132打开。当罐302被排气时,罐304以与上述相同的方式被加压以产生富氧空气。罐304的加压通过关闭出口阀134和打开入口阀124来实现。一段时间之后,富氧空气通过止回阀144离开罐304。
55.在罐302的排气期间,出口阀132打开,允许排气(主要是氮气)通过浓缩器出口130离开罐302到大气。在一种实现方式中,排出的排气可以被引导通过消声器133以减少由从罐释放加压气体而产生的噪音。当排气从罐302排出时,罐302中的压力下降,允许氮气从气体分离吸附剂解吸。氮气的解吸将罐302中的吸附剂重置为允许氮气从空气流中重新分离的状态。消声器133可包括开孔泡沫(或其他材料)以消声离开氧浓缩器的气体的声音。在一些实现方式中,用于空气输入和富氧空气输出的组合消声部件/技术可以提供在低于50分贝的声级下的氧浓缩器操作。
56.在罐302和304的排气过程中,有利的是除去至少大部分氮气。在一种实现方式中,在罐中的至少约50%、至少约60%、至少约70%、至少约80%、至少约90%、至少约95%、至少约98%、或基本上所有的氮气在该罐再用于从空气中分离氮气之前被除去。
57.在一些实现方式中,可以使用从另一个罐或储存的富氧空气引入罐中的富氧空气流来辅助氮气去除。在示例性实现方式中,当罐304排出排气时,一部分富氧空气可从罐302传送到罐304。在罐304排气期间将富氧空气从罐302转移到罐304有助于通过降低与吸附剂相邻的氮气的分压而从吸附剂解吸氮气。富氧空气流还有助于从罐中清除解吸的氮气(和其他气体)。在一种实现方式中,富氧空气可以穿过两个罐302和304之间的限流器151、153和155。限流器151可以是滴流限流器。限流器151例如可以是0.009d限流器(例如,限流器具有小于其内部的管的直径的半径0.009”)。限流器153和155可以是0.013d的限流器。也可以考虑其他限流器类型和尺寸,并且可以根据用于联接罐的具体构造和管道来使用。在一些实现方式中,限流器可以是压配合限流器,其通过在其各自的导管中引入较窄的直径来限制气流。在一些实现方式中,压配合限流器可以由蓝宝石、金属或塑料(也可以考虑其他材
料)制成。
58.还通过使用阀152和阀154来控制富氧空气在罐之间的流动。阀152和154可以在通气过程中短暂地打开(并且可以以其他方式关闭),以防止过多的氧气从净化罐损失。也可以考虑其他持续时间。在示例性实现方式中,罐302被通气,并且期望通过将在罐304中产生的一部分富氧空气通入罐302中来吹扫罐302。在罐302的排气过程中,在罐304的加压下,一部分富氧空气将通过限流器151进入罐302。另外的富氧空气从罐304通过阀154和限流器155进入罐302。阀152可以在转移过程中保持关闭,或者如果需要额外的富氧空气则可以打开。选择合适的限流器151和155,结合阀154的受控打开,允许受控量的富氧空气从罐304输送到罐302。在一种实现方式中,富氧空气的受控量是足以吹扫罐302并且通过使罐302的阀132通气而使富氧空气的损失最小化的量。虽然该实现方式描述了罐302的通气,但是应当理解,使用限流器151、阀152和限流器153,可以使用相同的过程来使罐304通气。
59.该对平衡/通气阀152和154与限流器153和155一起工作,以优化两个罐302和304之间的气流平衡。这可以允许更好的流量控制,以便用来自另一个罐的富氧空气吹扫罐302和304中的一个。它还可以在两个罐302和304之间提供更好的流动方向。已经发现,尽管流量阀152和154可以作为双向阀操作,但是通过这种阀的流速根据流过阀的流体的方向而变化。例如,从罐304流向罐302的富氧空气通过阀152的流速比从罐302流向罐304的富氧空气通过阀152的流速快。如果使用单个阀,最终将在罐之间输送太多或太少的富氧空气,并且随着时间的过去,罐将开始产生不同量的富氧空气。在平行的空气通路上使用相对的阀和限流器可以平衡两个罐之间的富氧空气的流动模式。使流动均衡可以允许用户在多个循环中获得稳定量的富氧空气,并且还可以允许可预测体积的富氧空气吹扫另一个罐。在一些实现方式中,空气通路可以不具有限流器,而是可以具有带有内置阻力的阀,或者空气通路本身可以具有窄的半径以提供阻力。
60.有时,氧浓缩器100可以关闭一段时间。当氧浓缩器关闭时,罐内的温度可能由于来自压缩系统的绝热热量损失而下降。当温度下降时,由罐内气体占据的体积将下降。罐302和304的冷却可导致罐302和304中的负压。通向和来自罐302和304的阀(例如,阀122、124、132和134)被动态地密封而不是气密地密封。因此,外部空气可以在关闭之后进入罐302和304以适应压力差。当外部空气进入罐302和304时,来自外部空气的湿气可被气体分离吸附剂吸附。罐302和304内水的吸附可导致气体分离吸附剂的逐渐降解,稳定地降低气体分离吸附剂产生富氧空气的能力。
61.在一种实现方式中,在氧浓缩器100关闭之后,通过在关闭之前对罐302和304加压,可以阻止外部空气进入罐302和304。通过在正压力下存储罐302和304,阀可通过罐302和304中的空气的内部压力而被迫进入气密关闭位置。在一种实现方式中,关闭时罐302和304中的压力应当至少大于环境压力。如使用的术语“环境压力”是指氧浓缩器100所处的环境的压力(例如室内、室外、平面内等的压力)。在一种实现方式中,罐302和304中的压力在关闭时至少大于标准大气压(即,大于760mmhg(托),1个大气压(atm),101,325pa)。在一种实现方式中,罐302和304中的压力在关闭时比环境压力大至少约1.1倍;比环境压力大至少约1.5倍;或比环境压力大至少约2倍。
62.在一种实现方式中,罐302和304的加压可以通过将加压空气从压缩系统引导到每个罐302和304中并且关闭所有阀以将加压空气捕集在罐中来实现。在示例性实现方式中,
当启动关闭序列时,入口阀122和124打开而出口阀132和134关闭。因为入口阀122和124通过共用管道连接在一起,当来自一个罐的空气和/或富氧空气可以转移到另一个罐时,罐302和304都可以变得加压。当压缩系统和两个入口阀之间的通路允许这种传送时,可能发生这种情况。因为氧浓缩器100以交替加压/通气模式操作,所以罐302和304中的至少一个在任何给定时间都应该处于加压状态。在可选实现方式中,通过压缩系统200的操作,可以增加每个罐302和304中的压力。当入口阀122和124打开时,罐302和304之间的压力将均衡,然而,任一罐中的均衡压力可能不足以阻止空气在关闭期间进入罐。为了确保阻止空气进入罐,压缩系统200可以运行足够的时间以将两个罐内的压力增加到至少大于环境压力的水平。不管罐的加压方法如何,一旦罐被加压,入口阀122和124关闭,将加压空气截留在罐内,这在关闭期间阻止空气进入罐。
63.参考图1c,描述了氧浓缩器100的实现方式。氧浓缩器100包括压缩系统200、罐系统300和设置在外壳170内的电源180。入口101位于外壳170中,以允许来自环境的空气进入氧浓缩器100。入口101可允许空气流入隔室以帮助冷却隔室中的部件。电源180为氧浓缩器100提供电源。压缩系统200通过入口105和消声器108吸入空气。消声器108可以降低由压缩系统吸入的空气的噪音,并且还可以包括干燥剂材料以从进入的空气中去除水。氧浓缩器100还可包括用于经由出口173从氧浓缩器通入空气和其他气体的风扇172。
64.在一些实现方式中,压缩系统200包括一个或多个压缩机。在另一实现方式中,压缩系统200包括联接到罐系统300的所有罐的单个压缩机。转到图1d和1e,示出了包括压缩机210和马达220的压缩系统200。马达220联接到压缩机210并向压缩机210提供操作力以操作压缩机构。例如,马达220可以是提供可旋转部件的马达,该可旋转部件引起压缩空气的压缩机210的部件的循环运动。当压缩机210是活塞式压缩机时,马达220提供使压缩机210的活塞往复运动的操作力。活塞的往复运动使压缩机210产生压缩空气。压缩空气的压力部分地由压缩机运行的速度(例如,活塞往复运动的速度)估算。因此,马达220可以是变速马达,其在各种速度下可操作以动态地控制由压缩机210产生的空气压力。
65.在一种实现方式中,压缩机210包括具有活塞的单头摇动型压缩机。可以使用其他类型的压缩机,如隔膜压缩机和其他类型的活塞压缩机。马达220可以是dc或ac马达,并向压缩机210的压缩部件提供工作功率。在一种实现方式中,马达220可以是无刷直流马达。马达220可以是变速马达,其被配置成以变速操作压缩机210的压缩部件。如图1b所示,马达220可以联接到控制器400,控制器向马达发送操作信号以控制马达的操作。例如,控制器400可以向马达220发送信号以:打开马达、关闭马达、并设置马达的运行速度。因此,如图1b所示,压缩系统200可包括速度传感器201。速度传感器201可以是用于确定马达220的旋转速度和/或压缩系统200的另一往复操作的频率的马达速度变换器。例如,来自马达速度传感器201的马达速度信号可以提供给控制器400。速度传感器或马达速度变换器201例如可以是霍尔效应传感器。控制器400可以基于氧浓缩器100的速度信号和/或任何其他传感器信号,例如压力传感器,如,蓄积器压力传感器107,经由马达220操作压缩系统200。因此,如图1b所示,控制器400接收传感器信号,如来自速度传感器201的速度信号和来自蓄积器压力传感器107的蓄积器压力信号。利用这样的信号,控制器400可以实现一个或多个控制回路(例如,反馈控制),用于基于传感器信号,如蓄积器压力和/或马达速度,操作压缩系统200,如在此更详细描述的。
66.压缩系统200固有地产生大量的热量。热量由马达220的功率消耗和功率到机械运动的转换引起。由于被压缩的空气对压缩机部件运动的阻力增大,压缩机210产生热量。由于压缩机210对空气的绝热压缩,也固有地产生热量。因此,空气的持续加压在外壳中产生热量。另外,电源180可以在向压缩系统200供电时产生热量。此外,氧浓缩器的用户可以在无条件的环境(例如,户外)中在可能比户内更高的环境温度下操作装置,因此进入的空气将已经处于加热状态。
67.在氧浓缩器100内产生的热可能是有问题的。锂离子电池由于其长寿命和轻重量而通常用作氧浓缩器的电源。然而,锂离子电池组在高温下是危险的,并且如果检测到危险的高电源温度,则在氧浓缩器100中采用安全控制来关闭系统。另外,当氧浓缩器100的内部温度升高时,由浓缩器产生的氧气量可能降低。这部分是由于在较高温度下在给定体积的空气中减少的氧气量。如果产生的氧气量降到预定量以下,则氧浓缩器100可自动关闭。
68.由于氧浓缩器的紧凑特性,散热可能是困难的。解决方案通常包括使用一个或多个风扇来产生通过外壳的冷却空气流。然而,这种解决方案需要来自电源180的额外电力,因此缩短了氧浓缩器100的便携式使用时间。在一种实现方式中,可以使用利用由马达220产生的机械动力的被动冷却系统。参考图1d和1e,压缩系统200包括具有外部旋转电枢(或外部可旋转电枢)230的马达220。具体地,马达220(例如dc马达)的电枢230缠绕在驱动电枢230的固定磁场周围。由于马达220是整个系统的热的主要贡献者,所以将热从马达传递出去并将其扫出外壳是有帮助的。在外部高速旋转的情况下,马达220的主要部件与其所存在的空气的相对速度非常高。电枢的表面积在外部安装时比在内部安装时更大。由于热交换的速率与表面积和速度的平方成比例,使用安装在外部的较大表面积的电枢增加了从马达220散热的能力。通过将电枢230安装在外部而获得冷却效率,允许消除一个或多个冷却风扇,从而在将氧浓缩器的内部保持在适当的温度范围内的同时减少重量和功率消耗。另外,外部安装的电枢230的旋转产生接近马达的空气运动,以产生额外的冷却。
69.此外,外部可旋转电枢可以有助于马达的效率,允许产生更少的热量。具有外部电枢的马达以类似于飞轮在内燃机中工作的方式工作。当马达驱动压缩机时,在低压下旋转阻力低。当压缩空气的压力较高时,马达的旋转阻力较高。结果,马达不能保持一致的理想旋转稳定性,而是根据压缩机的压力要求而喘振和减速。马达喘振然后减速的这种趋势是低效的,因此产生热量。外部电枢的使用给马达增加了更大的角动量,这有助于补偿马达所经受的可变电阻。由于马达不必用力工作,因此可以减少马达产生的热量。
70.在一种实现方式中,可以通过将空气传送装置240联接到外部可旋转电枢230来进一步提高冷却效率。在一种实现方式中,空气传送装置240被联接到外部电枢230上,使得外部电枢的旋转致使空气传送装置产生经过马达的至少一部分的空气流。在一种实现方式中,空气传送装置240包括联接到外部电枢230上的一个或多个风扇叶片。在一种实现方式中,多个风扇叶片可以被安排在环形圈中,使得空气传送装置240充当叶轮,叶轮通过外部旋转电枢的移动而旋转。如图1d和1e所示,空气传送装置240可安装到外部可旋转电枢230的外表面上,与马达220对齐。将空气传送装置240安装到电枢230允许空气流被引导朝向外部可旋转电枢230的主要部分,从而在使用期间提供冷却效果。在一种实现方式中,空气传送装置240引导空气流,使得外部可旋转电枢230的大部分处于空气流路径中。
71.此外,参见图1d和1e,由压缩机210加压的空气在压缩机出口212处离开压缩机
210。压缩机出口导管250联接到压缩机出口212以将压缩空气传送到罐系统300。如前所述,空气的压缩导致空气温度的升高。这种温度的升高可能对氧浓缩器的效率有害。为了降低加压空气的温度,压缩机出口导管250设置在由空气传送装置240产生的气流路径中。压缩机出口导管250的至少一部分可定位成靠近马达220。因此,由空气传送装置240产生的空气流可接触马达220和压缩机出口导管250。在一种实现方式中,压缩机出口导管250的大部分被定位成马达220附近。在一种实现方式中,如图1e所示,压缩机出口导管250盘绕在马达220周围。
72.在一种实现方式中,压缩机出口导管250由热交换金属构成。热交换金属包括但不限于铝、碳钢、不锈钢、钛、铜、铜-镍合金或由这些金属的组合形成的其他合金。因此,压缩机出口导管250可用作热交换器,以除去由空气压缩固有产生的热量。通过从压缩空气中除去热量,在给定压力下给定体积中的分子数增加。结果,可以增加在每个psa循环期间由每个罐产生的富氧空气的量。
73.这里描述的散热机制是被动的或利用氧浓缩器100所需的元件。因此,例如,可以在不使用需要额外功率的系统的情况下增加热的耗散。通过不需要额外的功率,电池组的运行时间可以增加,并且氧浓缩器的尺寸和重量可以最小化。同样,可以不使用附加的箱式风扇或冷却单元。消除这种附加特征降低了氧浓缩器的重量和功耗。
74.如上所述,空气的绝热压缩导致空气温度升高。在罐系统300中的罐的通气期间,从罐通出的排气的压力降低。离开罐的气体的绝热减压导致排气的温度在排气时下降。在一种实现方式中,从罐系统300排出的冷却排气327被导向电源180和压缩系统200。在一种实现方式中,罐系统300的基部315接收来自罐的排气327。排气327通过基部315被导向基部的出口325和电源180。如上所述,排气327由于气体的减压而被冷却,并因此被动地向电源180提供冷却。当压缩系统200工作时,空气传送装置240将收集冷却的排气并将排气327引向压缩系统200的马达220。风扇172还可以帮助引导排气327穿过压缩系统200并且离开壳体170。以这种方式,可以获得额外的冷却而不需要来自电池的任何另外的功率。
75.氧浓缩器系统100可包括至少两个罐,每个罐包括气体分离吸附剂。氧浓缩器100的罐可以由模制壳体形成。在一种实现方式中,罐系统300包括两个壳体部件310和510,如图1i所示。在各种实现方式中,氧浓缩器100的壳体部件310和510可以形成两部分模制的塑料框架,该框架限定两个罐302和304以及蓄积器106。壳体部件310和510可以单独形成,然后联接在一起。在一些实现方式中,壳体部件310和510可以是注射模制的或压缩模制的。壳体部件310和510可以由热塑性聚合物制成,如聚碳酸酯、碳化甲烷、聚苯乙烯、丙烯腈丁二烯苯乙烯(abs)、聚丙烯、聚乙烯或聚氯乙烯。在另一种实现方式中,壳体部件310和510可以由热固性塑料或金属(例如不锈钢或轻质铝合金)制成。轻质材料可用于降低氧浓缩器100的重量。在一些实现方式中,两个壳体310和510可以使用螺钉或螺栓紧固在一起。或者,壳体部件310和510可以激光或溶剂焊接在一起。
76.如图所示,阀座322、324、332和334以及导管330和346可以集成到壳体部件310中,以减少氧浓缩器100的气流中所需要的密封连接的数量。
77.壳体部件310和510中的不同部分之间的空气通路/管道可以采用模制导管的形式。用于空气通路的模制通道形式的导管可以占据壳体部件310和510中的多个平面。例如,模制空气导管可以形成在壳体部件310和510中的不同深度和不同位置处。在一些实现方式
中,这些导管中的大部分或基本上全部可以被集成到壳体部件310和510中以减少潜在的泄漏点。
78.在一些实现方式中,在将壳体部件310和510联接在一起之前,可以将o形环放置在壳体部件310和510的不同点之间以确保壳体部件被适当地密封。在一些实现方式中,部件可以单独地集成和/或联接到壳体部件310和510。例如,管道、限流器(例如,压配合限流器)、氧传感器、气体分离吸附剂、止回阀、插头、处理器、电源等可以在壳体部件联接在一起之前和/或之后联接到壳体部件310和510。
79.在一些实现方式中,通向壳体部件310和510外部的孔337可用于插入诸如限流器的装置。也可以使用孔来提高可模塑性。一个或多个孔可以在模制后被塞住(例如,用塑料塞)。在一些实现方式中,限流器可以在插入插塞以密封通路之前插入通路中。压配合限流器可具有允许压配合限流器与其相应孔之间的摩擦配合的直径。在一些实现方式中,可以将粘合剂添加到压配合限流器的外部,以在插入后将压配合限流器保持在适当位置。在一些实现方式中,插塞可以与其相应的管具有摩擦配合(或者可以具有施加到其外表面的粘合剂)。压配合限流器和/或其他部件可以使用窄尖端工具或杆(例如,直径小于相应孔的直径)插入并压入它们相应的孔中。在一些实现方式中,压配合限流器可以插入它们各自的管中,直到它们邻接管中的部件以停止它们的插入。例如,该特征可以包括半径的减小。也可以考虑其他特征(例如,在管的侧面的凸起、螺纹等)。在一些实现方式中,压配合限流器可以被模制到壳体部件中(例如,作为窄管段)。
80.在一些实现方式中,弹簧挡板139可以被放置在壳体部件310和510的对应的罐接纳部中,其中挡板139的弹簧侧面向罐的出口。弹簧挡板139可以向罐中的气体分离吸附剂施加力,同时还有助于防止气体分离吸附剂进入出口孔。弹簧挡板139的使用保持气体分离吸附剂紧凑,同时还允许膨胀(例如热膨胀)。保持气体分离吸附剂紧凑可以防止气体分离吸附剂在氧浓缩器系统100的运动期间破裂。
81.在一些实现方式中,过滤器129可以被放置在壳体部件310和510的面向相应罐的入口的相应罐接纳部分中。过滤器129从进入罐的进料气流中除去颗粒。
82.在一些实现方式中,来自压缩系统200的加压空气可以进入空气入口306。空气入口306联接到入口导管330。空气通过入口306进入壳体部件310,并通过入口导管330,然后到达阀座322和324。图1j和图1k描绘了壳体部件310的端视图。图1j描绘了在将阀装配到壳体部件310之前的壳体部件310的端视图。图1k示出了壳体310的端视图,其中阀装配到壳体部件310。阀座322和324被配置成分别接收入口阀122和124。入口阀122联接到罐302,入口阀124联接到罐304。壳体部件310还包括被配置成分别接收出口阀132和134的阀座332和334。出口阀132联接到罐302,出口阀134联接到罐304。入口阀122和124用于控制从导管330到相应罐的空气通路。
83.在一种实现方式中,加压空气被送入罐302或304中的一个,而另一个罐被通气。阀座322包括穿过壳体部件310进入罐302的开口323。类似地,阀座324包括穿过壳体部件310进入罐304的开口375。如果相应的阀122和124打开,则来自入口导管330的空气通过开口323或375,并进入相应的罐302和304。
84.止回阀142和144(见图1i)分别联接到罐302和304。止回阀142和144是单向阀,其由罐被加压和通气时产生的压差被动地操作。在罐302和304中产生的富氧空气从罐进入壳
体部件510的开口542和544。通路(未示出)将开口542和544分别连接到导管342和344。当罐302中的压力足以打开止回阀142时,在罐302中产生的富氧空气从罐302通过开口542并进入导管342。当止回阀142打开时,富氧空气通过导管342流向壳体部件310的端部。类似地,当罐304中的压力足以打开止回阀144时,在罐304中产生的富氧空气从罐304穿过开口544并进入导管344。当止回阀144打开时,富氧空气通过导管344流向壳体部件310的端部。
85.来自罐302或304的富氧空气穿过导管342或344并进入形成在壳体部件310中的导管346。导管346包括将导管联接到导管342、导管344和蓄积器106的开口。因此,在罐302或304中产生的富氧空气行进到导管346并进入蓄积器106。
86.如图1b所示,蓄积器106内的气体压力可以由传感器测量,如用蓄积器压力传感器107测量。(还参见图1f。)因此,蓄积器压力传感器107产生表示蓄积的富氧空气的压力的信号。合适的压力换能器的示例是来自honeywell asdx系列的换能器。替代性合适的压力换能器是来自general electric的npa系列的换能器。在一些形式中,压力传感器107可以替代地测量蓄积器106外部的气体的压力,如在蓄积器106与阀(例如,供应阀160)之间的输出路径中,该阀控制富氧空气的释放以便以团的形式递送至用户。
87.罐302通过关闭入口阀122和打开出口阀132而通气。出口阀132将排气从罐302释放到由壳体部件310的端部限定的容积中。泡沫材料可以覆盖壳体部件310的端部,以减少由从罐释放气体而产生的声音。类似地,罐304通过关闭入口阀124并打开出口阀134而排气。出口阀134将排气从罐304释放到由壳体部件310的端部限定的容积中。
88.三个导管形成在壳体部件510中,用于在罐之间传送富氧空气。如图1l所示,导管530将罐302联接到罐304。限流器151(未示出)设置在导管530中,在罐302和罐304之间,以在使用期间限制富氧空气的流量。导管532还将罐302联接到罐304。如图1m所示,导管532联接到容纳阀152的阀座552。限流器153(未示出)布置在罐302和罐304之间的导管532中。导管534还将罐302联接到罐304。如图1m所示,导管534联接到容纳阀154的阀座554。限流器155(未示出)布置在罐302和罐304之间的导管534中。该对平衡/通气阀152/154与限流器153和155一起工作,以优化两个罐302和304之间的气流平衡。
89.蓄积器106中的富氧空气通过供应阀160进入形成在壳体部件510中的膨胀室162。壳体部件510中的开口(未示出)将蓄积器106联接到供应阀160。在一种实现方式中,膨胀室162可以包括被配置以估算穿过该室的气体的氧浓度的一个或多个装置。
90.联接到一个或多个罐的出口系统包括一个或多个用于向用户提供富氧空气的导管。在一种实现方式中,在罐302和304中的任一个中产生的富氧空气分别通过止回阀142和144被收集在收集器106中,如图1b示意性所示。离开罐302和304的富氧空气可在提供给用户之前收集在氧气存储器106中。在一些实现方式中,诸如管的导管可以联接到蓄积器106以向用户提供富氧空气。富氧空气可通过气道输送装置(例如,患者接口)提供给用户,该气道输送装置将富氧空气输送到用户的嘴和/或鼻子。在一种实现方式中,气道输送装置可以包括将氧气引向用户的鼻子和/或嘴的管,管可以不直接联接到用户的鼻子。
91.转到图1f,示出了用于氧浓缩器的出口系统的实现方式的示意图。供应阀160可联接到导管以控制富氧空气从蓄积器106向用户的释放。在一种实现方式中,供应阀160是电磁致动的柱塞阀。供应阀160由控制器400致动,以控制向用户输送富氧空气。供应阀160的致动不与摆动吸附过程定时或同步。相反,致动与用户的呼吸同步,如下所述。在一些实现
方式中,供应阀160可以具有连续值的致动,以建立用于提供富氧空气的临床有效振幅轮廓。
92.如图1f所示,蓄积器106中的富氧空气通过供应阀160进入膨胀室162。在一种实现方式中,膨胀室162可以包括被配置以估算穿过膨胀室162的气体的氧浓度的一个或多个装置。膨胀室162中的富氧空气通过由供应阀160从蓄积器106释放气体而短暂地形成,然后通过小孔限流器175排放到流速传感器185,然后到颗粒过滤器187。限流器175可以是0.025d的限流器。可以使用其他限流器类型和尺寸。在一些实现方式中,可以限制壳体中的空气通路的直径以产生受限的气流。流速传感器185可以是被配置以产生表示流过导管的气体速率的信号的任何传感器。颗粒过滤器187可用于在将富氧空气输送到用户之前过滤细菌、灰尘、颗粒等。富氧空气通过过滤器187到达连接器190,连接器通过输送导管192将富氧空气输送给用户,并送到压力传感器194。
93.与供应阀160的编程致动相结合的出口通路的流体动力学可导致在正确的时间提供氧气团,并具有确保快速输送到用户肺中而没有过多废物的振幅分布。
94.膨胀室162可以包括一个或多个氧传感器,其适于确定通过该室的气体的氧浓度。在一种实现方式中,使用氧传感器165来估算穿过膨胀室162的气体的氧浓度。氧传感器是被配置以测量气体中氧气浓度的装置。氧传感器的示例包括但不限于超声氧传感器、电氧传感器、化学氧传感器和光学氧传感器。在一种实现方式中,氧传感器165是包括超声发射器166和超声接收器168的超声氧传感器。在一些实现方式中,超声发射器166可以包括多个超声发射器,并且超声接收器168可以包括多个超声接收器。在具有多个发射器/接收器的实现方式中,多个超声发射器和多个超声接收器可以轴向对准(例如,穿过可以垂直于轴向对准的气体流动路径)。
95.在使用中,来自发射器166的超声波可以通过设置在室162中的富氧空气被引导到接收器168。超声波氧传感器165可以被配置为检测通过富氧空气的声速以确定富氧空气的成分。氮气和氧气的声速不同,在两种气体的混合物中,通过混合物的声速可能是与混合物中每种气体的相对量成比例的中间值。在使用中,接收器168处的声音与从发射器166发出的声音稍微异相。该相移是由于与通过导线的电脉冲的相对较快的速度相比,通过气体介质的声速相对较慢。然后,相移与发射器166和接收器168之间的距离成比例,并与通过膨胀室162的声速成反比。室162中气体的密度影响声音通过膨胀室162的速度,并且密度与膨胀室162中氧气与氮气的比率成比例。因此,相移可用于测量膨胀室162中的氧浓度。以这种方式,蓄积器106中的氧的相对浓度可以被估算为通过蓄积器106传播的检测到的声波的一个或多个特性的函数。
96.在一些实现方式中,可以使用多个发射器166和接收器168。来自发射器166和接收器168的读数可以被平均以减少湍流系统中固有的误差。在一些实现方式中,其他气体的存在还可以通过测量传输时间并且将所测量的传输时间与其他气体和/或气体混合物的预定传输时间进行比较来检测。
97.可以通过增加发射器166和接收器168之间的距离来增加超声氧传感器系统的灵敏度,例如以允许在发射器166和接收器168之间出现几个声波周期。在一些实现方式中,如果存在至少两个声音周期,则可以通过在两个时间点测量相对于固定参考的相移来减小换能器的结构变化的影响。如果从较后的相移中减去较早的相移,则可以减小或消除由膨胀
室162的热膨胀引起的偏移。由发射器166和接收器168之间的距离变化引起的偏移在测量间隔处可以大致相同,而由于氧浓度变化引起的变化可以是累积的。在一些实现方式中,在稍后时间测量的偏移可以乘以居间周期的数目并且与两个相邻周期之间的偏移进行比较。关于在膨胀室中感测氧气的进一步细节可以例如在标题为“氧浓缩器设备和方法”的美国专利申请no.12/163,549中找到,该申请于2009年3月12日作为美国公开no.2009-0065007公开,并且通过引用并入本文。
98.流速传感器185可用于确定流过出口系统的气体的流速。可以使用的流速传感器包括但不限于:膜片/波纹管流量计;旋转流量计(例如霍尔效应流量计);涡轮流量计;孔口流量计;以及超声波流量计。流速传感器185可以联接到控制器400。气体流过出口系统的速率可以是用户呼吸体积的指示。流过出口系统的气体流速的变化也可用于确定用户的呼吸速率。控制器400可产生控制信号或触发信号以控制供应阀160的致动。这种对供应阀的致动的控制可以基于由流速传感器185估算的用户的呼吸速率和/或呼吸体积。
99.在一些实现方式中,超声波氧传感器165和例如流速传感器185可以提供对所提供的氧气的实际量的测量。例如,流速传感器185可以测量所提供的气体的体积(基于流速),并且超声氧传感器165可以提供所提供的气体的氧浓度。这两个测量值一起可由控制器400用来确定提供给用户的实际氧气量的近似值。
100.富氧空气通过流速传感器185到达过滤器187。过滤器187在向用户提供富氧空气之前去除细菌、灰尘、颗粒等。过滤后的富氧空气进入连接器190。连接器190可以是将过滤器187的出口联接到压力传感器194和输送导管192的“y”连接器。压力传感器194可用于监测通过输送导管192到达用户的气体压力。在一些实现方式中,压力传感器194被配置以产生与施加到感测表面的正压力或负压力的量成比例的信号。由压力传感器194感测到的压力变化可用于确定用户的呼吸速率以及吸入的开始(也称为触发时刻),如下所述。控制器400可以基于用户的呼吸速率和/或吸气的开始来控制供应阀160的致动。在一种实现方式中,控制器400可以基于由流速传感器185和压力传感器194之一或二者提供的信息来控制供应阀160的致动。
101.富氧空气可通过输送导管192提供给用户。在一种实现方式中,导管192可以是硅树脂管。导管192可以使用气道输送装置196连接到用户,如图1g和1h所示。气道输送装置196可以是能够向鼻腔或口腔提供富氧空气的任何装置。气道输送装置的示例包括但不限于:鼻罩、鼻枕、鼻叉管、鼻插管和嘴件。图1g中描绘了鼻插管气道输送装置196。鼻插管气道输送装置196定位在用户的气道附近(例如,靠近用户的嘴和/或鼻),以允许向用户递送富氧空气,同时允许用户从周围环境呼吸空气。
102.在另一种实现方式中,可以使用嘴件向用户提供富氧空气。如图1h所示,嘴件198可以联接到氧浓缩器100。嘴件198可以是用于向用户提供富氧空气的唯一装置,或者嘴件可以与鼻输送装置196(例如鼻插管)结合使用。如图1h所示,富氧空气可通过鼻插管气道输送装置196和嘴件198提供给用户。
103.吸嘴198可拆卸地定位在用户的口中。在一种实现方式中,嘴件198可移除地联接到用户口中的一个或多个牙齿。在使用过程中,富氧空气通过嘴件被导入用户的口中。嘴件198可以是模制的夜用防护咬嘴,以符合用户的牙齿。或者,嘴件可以是下颌复位装置。在一种实现方式中,至少大部分嘴件在使用期间位于用户的嘴中。
104.在使用过程中,当在嘴件附近检测到压力变化时,可将富氧空气引导到嘴件198。在一个实现方式中,嘴件198可以联接到压力传感器194。当用户通过其嘴件吸入空气时,压力传感器194可检测靠近嘴件的压降。氧浓缩器100的控制器400可以控制在吸入开始时向用户释放富氧空气团。
105.在个体的典型呼吸过程中,吸入通过鼻子、通过嘴或通过鼻子和嘴两者发生。此外,呼吸可以根据各种因素从一个通路改变到另一个通路。例如,在更活跃的活动期间,用户可以从通过他们的鼻子呼吸切换到通过他们的嘴呼吸,或者通过他们的嘴和鼻子呼吸。如果停止通过被监测通路的呼吸,则依赖于单一输送模式(鼻或口腔)的系统可能不能正常工作。例如,如果使用鼻插管向用户提供富氧空气,则将吸入传感器(例如,压力传感器或流速传感器)联接到鼻插管以确定吸入的开始。如果用户停止通过他们的鼻子呼吸,并切换到通过他们的嘴呼吸,则氧浓缩器100可能不知道何时提供富氧空气,因为没有来自鼻插管的反馈。在这种情况下,氧浓缩器100可以增加流速和/或增加提供富氧空气的频率,直到吸入传感器检测到用户吸入。如果用户经常在呼吸模式之间切换,则提供富氧空气的默认模式可能导致氧浓缩器100工作更困难,限制了系统的便携式使用时间。
106.在一种实现方式中,嘴件198与鼻插管气道输送装置196结合使用以向用户提供富氧空气,如图1h所示。嘴件198和鼻腔导气管输送装置196都联接到吸入传感器。在一种实现方式中,嘴件198和鼻插管气道输送装置196联接到同一吸入传感器。在另一种实现方式中,嘴件198和鼻插管气道输送装置196联接到不同的吸入传感器。在任一实现方式中,吸入传感器可以检测从嘴或鼻子吸入的开始。氧浓缩器100可被配置成向输送装置(即嘴件198或鼻插管气道输送装置196)提供富氧空气,在输送装置附近检测到吸入的开始。或者,如果在任一输送装置附近检测到吸入的开始,则可将富氧空气提供给嘴件198和鼻插管气道输送装置196。如图1h所示的双输送系统的使用对于用户在睡眠时特别有用,并且可以在鼻呼吸和嘴呼吸之间切换而无需有意识的努力。
107.氧浓缩器100的操作可以使用耦合到氧浓缩器100的各种部件的内部控制器400自动执行,如本文所述。控制器400包括一个或多个处理器410和内部存储器420,如图1b所示。用于操作和监控氧浓缩器100的方法可以通过存储在内部存储器420或联接到控制器400的外部存储介质中的程序指令来实现,并由一个或多个处理器410执行。存储介质可以包括各种类型的存储设备或存储装置中的任何一种。术语“存储介质”旨在包括安装介质,例如光盘只读存储器(cd-rom)、软盘或磁带设备;计算机系统存储器或随机存取存储器,如动态随机存取存储器(dram)、双倍数据速率随机存取存储器(ddrram)、静态随机存取存储器(sram)、扩展数据输出随机存取存储器(edoram)、随机存取存储器(ram)等;或非易失性存储器,如磁介质,例如硬盘驱动器、或光存储器。存储介质也可以包括其他类型的存储器或其组合。此外,存储介质可以位于执行程序的控制器400附近,或者可以位于通过网络连接到控制器400的外部计算设备中,如下面详细描述的。在后一种情况下,外部计算设备可以向控制器400提供用于执行的程序指令。术语“存储介质”可包括可驻留在不同位置(例如,在通过网络连接的不同计算装置中)的两个或更多个存储介质。
108.在一些实现方式中,控制器400包括处理器410,处理器包括例如一个或多个现场可编程门阵列(fpga)、微控制器等,包括在设置在氧浓缩器100中的电路板上。处理器410被配置为执行存储在存储器420中的编程指令。在一些实现方式中,编程指令可以内置到处理
器410中,使得处理器410外部的存储器可以不被单独访问(即,存储器420可以在处理器410内部)。
109.处理器410可以联接到氧浓缩器100的各种部件,包括但不限于压缩系统200,用于控制通过系统的流体流的一个或多个阀(例如,阀122、124、132、134、152、154、160)、氧传感器165、压力传感器194、流速传感器185、温度传感器(未示出)、风扇172、以及可以电控制的任何其他部件。在一些实现方式中,单独的处理器(和/或存储器)可以联接到一个或多个部件。
110.控制器400被配置为(例如,通过程序指令编程)操作氧浓缩器100,并且进一步被配置为监测氧浓缩器100,如用于故障状态或其他过程信息。例如,在一种实现方式中,控制器400被编程为如果系统正在操作并且在预定时间量内用户没有检测到呼吸则触发警报。例如,如果控制器400在75秒的时间段内没有检测到呼吸,则可以点亮报警led和/或可以发出声音报警。如果用户确实停止了呼吸,例如在睡眠呼吸暂停事件期间,警报可能足以唤醒用户,导致用户恢复呼吸。呼吸动作可足以使控制器400重置该报警功能。可替代地,如果当输送导管192从用户移除时系统意外地保持打开,则警报器可以用作用户关闭氧浓缩器100的提醒。
111.控制器400进一步联接到氧传感器165,并且可以被编程用于连续或定期监测通过膨胀室162的富氧空气的氧气浓度。可以将最小氧浓度阈值编程到控制器400中,使得控制器400点亮led视觉警报和/或听觉警报以警告用户低的氧浓度。
112.控制器400还联接到内部电源180,并且可以被配置为监视内部电源的充电水平。可以将最小电压和/或电流阈值编程到控制器400中,使得控制器400点亮led视觉警报和/或听觉警报以警告用户低功率状态。当电池接近零可用电荷时,可以间歇地并且以增加的频率激活警报。在本发明的其他部分中详细描述了可以由控制器400实现的其他功能。
113.控制面板600用作用户和控制器400之间的接口,以允许用户启动氧浓缩器100的预定操作模式并监控系统的状态。图1n描绘了控制面板600的实现方式。用于对内部电源180充电的充电输入端口605可以布置在控制面板600中。
114.在一些实现方式中,控制面板600可以包括按钮以激活氧浓缩器100的各种操作模式。例如,控制面板600可以包括电源按钮610、流速设置按钮620至626、激活模式按钮630、睡眠模式按钮635、海拔按钮640和电池检查按钮650。在一些实现方式中,这些按钮中的一个或多个可以具有相应的led,led可以在该相应的按钮被按下时点亮,并且可以在相应的按钮被再次按下时断电。电源按钮610可以打开或关闭系统。如果启动电源按钮610以关闭系统,则控制器400可以启动关闭序列以将系统置于关闭状态(例如,两个罐都被加压的状态)。流速设置按钮620、622、624和626允许选择规定的富氧空气的连续流速(例如,按钮620选择0.2lpm,按钮622选择0.4lpm,按钮624选择0.6lpm,按钮626选择0.8lpm)。在其他实现方式中,可以增加或减少流速设置的数量。在选择流速设置之后,氧浓缩器100将控制操作以根据所选择的流速设置实现富氧空气的产生。海拔按钮640可以在用户将要处于比用户定期使用氧浓缩器100的海拔更高的位置时被激活。
115.电池检查按钮650启动氧浓缩器100中的电池检查例程,这导致控制面板600上的相对电池剩余功率led 655被点亮。
116.如果如通过将检测到的呼吸速率或深度与阈值进行比较所估算的相对不活动(例
如,睡着、坐着等),则用户可以具有低呼吸速率或深度。如果相对活跃(例如,行走、锻炼等),则用户可以具有高呼吸速率或深度。可以根据检测到的呼吸速率或深度自动估算活动/睡眠模式,和/或用户可以通过分别按下激活模式的按钮630或睡眠模式的按钮635来手动指示激活模式或睡眠模式。在一些实现方式中,poc 100默认为激活模式。
117.氧浓缩器100的主要用途是向用户提供补充氧气。可以在氧浓缩器100的控制面板600上选择一个或多个流速设置,然后其将控制操作以根据所选择的流速设置实现富氧空气的产生。在一些版本中,可以实现多个流速设置(例如,五个流速设置)。如这里更详细描述的,控制器400可以实现pod(脉冲氧气输送)或需求操作模式。控制器400可以调节一个或多个释放的脉冲或团的大小,以根据选定的流速设置实现富氧空气的输送。
118.为了使输送的富氧空气的效果最大化,控制器400可以被编程为使每个富氧空气团的释放与用户的吸入同步。当用户吸气时将一团富氧空气释放给用户可以通过例如当用户呼气时不释放氧气来减少氧气的浪费。控制面板600上的流速设置可以对应于输送氧气的分钟量(推注量乘以每分钟的呼吸速率),例如0.2lpm、0.4lpm、0.6lpm、0.8lpm、1lpm、1.1lpm。
119.由氧浓缩器100产生的富氧空气可储存在氧气蓄积器106中,并在pod操作模式下在用户吸气时释放给用户。由氧浓缩器100提供的富氧空气的量部分地由供应阀160控制。在一种实现方式中,供应阀160打开足够长的时间以向用户提供由控制器400估算的适当量的富氧空气。为了使氧气的浪费最小化,富氧空气可以在检测到用户吸气开始之后立即作为团剂释放。例如,富氧空气团可以在用户吸入的最初几毫秒内释放。
120.在一种实现方式中,可以使用诸如压力传感器194的吸入传感器来检测用户吸入的开始(称为“触发”的过程)。例如,可以通过使用压力传感器194来检测用户吸入的开始。在使用中,用于提供富氧空气的输送导管192通过鼻腔导气管输送装置196和/或嘴件198联接到用户的鼻子和/或嘴。输送导管192中的压力因此代表用户的气道压力,并因此指示用户的呼吸。在吸入开始时,用户开始通过鼻子和/或嘴将空气吸入到他们的身体中。当吸入空气时,在输送导管192的端部产生负压,部分地由于被抽吸穿过输送导管192端部的空气的文丘里作用。控制器400分析来自压力传感器194的压力信号以检测指示吸入开始的压力下降。在检测到吸入开始时,供应阀160打开以从蓄积器106释放一团富氧空气。
121.输送导管192中压力的正变化或上升指示用户呼气。控制器400可以分析来自压力传感器194的压力信号以检测指示呼气开始的压力升高。在一种实现方式中,当感测到正压力变化时,供应阀160关闭,直到检测到下一次吸入开始。可替代地,供应阀160可以在被称为团剂持续时间的预定间隔之后关闭。通过测量吸入的相邻开始之间的间隔,可以估算用户的呼吸速率。通过测量吸气开始和随后呼气开始之间的间隔,可以估算用户的呼吸时间。
122.在其他实现方式中,压力传感器194可以位于与用户气道气动连通但与输送导管192分开的感测导管中。在这种实现方式中,来自压力传感器194的压力信号因此也表示用户的气道压力。
123.在一些实现方式中,压力传感器194的灵敏度可能受到压力传感器194距用户的物理距离的影响,特别是如果压力传感器194位于氧浓缩器100中并且通过将氧浓缩器100联接到用户的输送导管192检测到压差时。在一些实现方式中,压力传感器194可以被放置在用于向用户提供富氧空气的气道递送装置196中。来自压力传感器194的信号可以经由电线
或通过遥测技术(例如通过蓝牙
tm
或其他无线技术)电子地提供给氧浓缩器100中的控制器400。
124.触发过程的灵敏度由触发阈值控制。将来自压力传感器194的信号与触发阈值进行比较,以确定是否发生了显著的压力下降,从而指示吸入的开始。调整触发阈值改变了触发过程的灵敏度。在一些实现方式中,触发阈值被设置为当poc 100处于睡眠模式(例如,如自动估算的或由用户经由睡眠模式按钮635请求的)时与当poc 100处于激活模式(例如,如自动估算的或由用户经由激活模式按钮630请求的)时相比给予触发过程更高的灵敏度。
125.poc 100处于激活模式,并且在预定间隔(例如8秒)内没有检测到吸入的开始,poc 100改变为睡眠模式,这增加了如上所述的触发灵敏度。如果在另一预定间隔(例如8秒)内未检测到吸入的开始,则poc 100进入“自动脉冲”模式。在自动脉冲模式中,控制器400控制供应阀160的致动,以便以规则的、预定的自动脉冲间隔(例如4秒)输送团剂。一旦通过触发过程检测到的开始或poc 100断电,poc 100就退出自动脉冲模式。
126.在一些实现方式中,如果用户的当前活动水平(例如使用检测到的用户的呼吸速率估算的当前活动水平)超过预定阈值,则控制器400可以实现警报(例如,视觉和/或音频)以警告用户当前呼吸速率正在超过氧浓缩器100的输送能力。例如,阈值可以设置为每分钟40次呼吸(bpm)。
127.图2a示出了图1a-1b所示的氧浓缩器100的蓄积器或氧气箱106的横截面。在该示例中,氧气箱106包括用端部502和504密封的封闭圆柱体或容器500。圆柱体500具有容纳富氧空气的内部容积510。尽管在该示例中箱106具有圆柱体,但是应当理解,任何合适的形状都可以用于箱106。图1i中的导管346从端部504向圆柱体500供应富氧空气。另一导管506附接到端部504,以允许富氧空气从箱106流到阀160,如图1f所示。如上所述,当阀160打开时,患者可以通过导管506从箱106吸入富氧空气。或者,端部504可设有单个导管,该导管既用作将富氧空气引入箱106的入口,又用作允许将富氧空气输送到患者的出口,并可由导管上的三通阀控制。
128.由于尺寸是对系统部件的限制,气体吸附材料的颗粒520位于氧气箱106中,以提高在箱106中储存富氧空气的能力。这允许更大体积的富氧空气存储在箱106中,而不需要使用更大的箱。实际上,它还允许较小的箱106用于与没有气体吸附材料的箱相当的存储容量。关于这一点,应当理解,气体吸附材料可以具有吸附富氧空气中存在的所有气体的能力。还应当理解,氧气将是富氧产品气体中最丰富的气体。因此,在具体示例中,具有非选择性或特别选择性地吸附氧气的倾向的气体吸附材料将在氧气箱106中提供有益的储存条件。
129.安装在端部502和504之间的圆柱形过滤器容器530容纳颗粒520。过滤器容器530包括由网状物制成的圆柱形主体532,该网状物具有开口,该开口用于使气体通过颗粒520并被颗粒吸附,但防止颗粒520被患者通过导管506吸入。在该示例中,圆柱体532由圆形端部534和536支撑,但是如果箱106使用不同的形状,则可以使用其他形状。圆形端部534和536可以具有圆形框架,该圆形框架被附接到圆柱形主体532的对应端的圆周上。端部534和536还可以包括网状表面以允许氧气到达所包含的颗粒520。
130.具有在压力下吸附富氧空气的能力的任何材料都可用于吸附材料,特别是选择性吸附氧气的材料。材料增加了氧气的容量,使得与不存在材料时相比,可以在箱106中储存
更大量的氧气。其还具有对于相同的氧气总量需要较小的箱的效果。吸附材料的一个示例是碳分子筛。其他示例性材料可包括沸石材料,例如13x沸石、沸石5a(由zeochem、arkema或uop提供)、石墨或活性炭和金属有机骨架(mof)。吸附材料将气体(富氧空气)吸附到使箱的容量增加到超过没有吸附材料的空箱的容量的程度。
131.这种材料包含在氧气箱106内,特别是如果它们以粉末/颗粒形式存在,例如图2a中的颗粒520。过滤器容器530安装在箱106的内部。或者,单个过滤器可安装在端部504附近,在端部504处与导管506相关联,在沿导管506的任何点处,或在出口174处与氧浓缩器壳体外部上的导管506的出口相关联,以防止吸附材料传送到用户。
132.吸附材料也可以是烧结的或块状的,从而不需要特殊的过滤器。图2b示出了容量增大的氧气箱106的另一示例。图2b中的箱106中的相同元件在图2a中的对应部分用相同元件标记。图2b中的箱106包括气体吸附材料块550。在该示例中,块550的体积和形状与箱106的内部体积大致相同。然而,可以理解的是,可以采用更小的尺寸和不同的形状,只要材料被支撑在箱106内被固定。块550起到吸附富氧空气的作用,从而增加箱106的存储容量。块550是材料的整体形式,其尺寸大于导管506,因此不需要过滤器。
133.吸附材料的添加将增加氧气箱106的存储容量。尽管向箱中添加吸附材料将增加系统的一些重量,但在实施例中,这将被所需箱的尺寸的减小(由于增加的容量)以及因此箱的总重量所抵消。例如,在25℃和250kpa下的100ml箱可容纳约0.32克氧气。在该示例中,100ml箱中碳分子筛(cms)的质量(堆积密度为0.9g/cm3)可以为90克。如上所述,该物质可以如图2a所示分布在较小的颗粒中,或者如图2b所示以一个或多个较大的块的形式分布。氧的等温容量为0.016g o2/g cms。因此,cms上吸附的氧为1.41克。空隙分数中的氧(考虑0.4的空隙分数)=0.13g/总和=1.54克氧。这在示例压力和温度条件下提供了4.8倍的氧气存储容量。
134.如在本技术中使用的,术语“部件”、“模块”、“系统”等一般指计算机相关实体,或者硬件(例如,电路)、硬件和软件的组合、软件,或与具有一个或多个特定功能的操作机器相关的实体。例如,部件可以是,但不限于,在处理器(例如,数字信号处理器)、微处理器、对象、可执行文件、执行线程、程序和/或计算机上运行的进程。作为说明,在控制器上运行的应用以及控制器都可以是部件。一个或多个部件可以驻留在进程和/或执行线程内,并且部件可以位于一台计算机上和/或分布在两台或多台计算机之间。此外,“装置”可以以特别设计的硬件的形式出现;通过在其上执行使硬件能够执行特定功能的软件而专门制造的通用硬件;存储在计算机可读介质上的软件;或其组合。
135.这里使用的术语仅用于描述特定实施例的目的,并不旨在限制本发明。如本文所用,单数形式“一”、“一个”和“该”也旨在包括复数形式,除非上下文另外清楚地指示。此外,在具体实施方式和/或权利要求书中使用了术语“包括(including/includes)”、“具有(having/has)”、“具有(with)”或其变体,这些术语旨在以类似于术语“包含(comprising)”的方式为包括性的。
136.除非另有定义,本文使用的所有术语(包括技术和科学术语)具有与本领域普通技术人员通常理解的相同含义。此外,术语,例如在常用词典中定义的术语,应被解释为具有与其在相关技术的上下文中的含义一致的含义,并且除非在此明确定义,否则不会以理想化或过于正式的意义进行解释。
137.虽然上面已经描述了本发明的各种实施方案,但是应当理解,它们仅仅是作为示例而非限制来呈现的。尽管已经参照一个或多个实现方式示出和描述了本发明,但是在阅读和理解了本说明书和附图之后,本领域的其他技术人员将想到或知晓等同的替换和修改。此外,虽然本发明的特定特征可能仅相对于若干实现方式中的一个被公开,但是这种特征可以与其他实现方式的一个或多个其他特征组合,这对于任何给定或特定应用可能是期望的和有利的。因此,本发明的宽度和范围不应受到上述任何实施方案的限制。相反,本发明的范围应当根据所附权利要求及其等同物来限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。