1.本发明涉及基于神经网络的人体关键点识别领域,尤其涉及双下肢负重位力线诊断系统及智能化测量方法。
背景技术:
2.下肢畸形是临床上常见的一种骨科疾病,其形成的原因有很多,如骨性关节炎,佝偻病,以及创伤性骨折畸形愈合等。根据文献报道,骨性关节炎在60岁以上老年男性和女性人群的患病率分别高达10%和18%。下肢畸形不仅对患者的外观造成影响,严重时常伴有关节疼痛,影响关节功能,对患者的身体及心理造成双重危害,降低生活质量,从而及时对严重的下肢畸形进行矫正手术变的尤为重要。
3.在下肢畸形矫正手术中,准确的畸形诊断及力线规划是决定手术成功的关键因素,这需要医生在下肢全长x线片上进行下肢力线的绘制及关键角度的测量。目前临床上应用最多的测量方式是人工测量,这需要外科医生通过测量工具在下肢全长x线片上进行手工标点,划线并进行角度测量,但人工测量受医生水平,心理状态等人为因素的影响,主观误差较大,且诊断效率低下。
4.市面上也存在一些测量软件,比如截骨大师,截骨神器等。它们通过将x线片导入软件,手动进行相应点和线的规划,随后自动获得相应的角度。在一定程度上减少了人工干预,但是仍存在较大的主观误差。下肢力线的准确测量与提高手术疗效具有直接关系。而现如今临床上骨科就诊病例极多,骨科医生压力较大,虽然下肢力线及相应角度的绘制及测量并不困难,但是较为繁琐,极大的浪费医疗资源。
5.因此,一款操作简单、双下肢力线测量准确的双下肢负重位力线诊断系统及智能化测量方法具有重要的临床意义。
技术实现要素:
6.本发明的目的在于提供一种双下肢负重位力线测量及诊断系统及智能化测量方法,本发明无须精确的关键点坐标,针对膝关节走形方向线和踝关节线,以斜率替代点坐标,利用卷积神经网络等深度学习技术与数字图像处理技术对人体下肢全长图像进行处理,快速精准的实现下肢机械轴、下肢力线及关节角度的绘制与计算。
7.一种双下肢负重位力线测量及诊断系统,包括:
8.数据加载模块,用于加载和读取训练集关键点位置信息的.mat数据文件、待测量x线片,选取各图片中关节图像位置;
9.关键点选取模块,针对数据加载模块选取的关节图像位置,将获得的关节图像作为输入层使用卷积神经网络进行分类识别,获得x线片对应的关键点坐标,包括八个特征轴线关键点坐标和多个关节线关键点坐标;连接获得的八个关键点坐标绘制特征轴线,形成沿左右侧下肢延伸的四条特征轴线,包括第一特征轴线、第二特征轴线、第三特征轴线、第四特征轴线;连接关节线关键点坐标绘制六条关节线,形成左右侧膝关节上侧走形方向线、
左右侧膝关节下侧走形方向线和左右侧踝关节走形线;其中第一、二特征轴线对应左右侧膝关节上侧走形方向线,第三、四特征轴线对应左右侧膝关节下侧走形方向线和左右侧踝关节走形线;
10.角度计算模块,利用获得的关键点、特征轴线和关节线计算关键点间斜率并用反三角函数计算机械轴股骨远端外侧角、关节线汇聚角、胫骨近端内侧角和胫骨远端外侧角;
11.力线诊断及输出模块:根据角度计算模块获得的角度,将获得的角度值与预设的机械轴股骨远端外侧角、关节线汇聚角、胫骨近端内侧角和胫骨远端外侧角的参考阈值进行比较,如果获得的角度值不在参考阈值内,则说明该角度异常,可能存在下肢畸形的情况;若均在参考阈值内,则说明不存在下肢畸形的情况;然后输出获得的角度值,将多条特征轴线和关节线体现在x片上,并以图片输出的形式呈现测量结果。
12.进一步的,所述预设的机械轴股骨远端外侧角、关节线汇聚角、胫骨近端内侧角和胫骨远端外侧角的参考阈值包括:所述机械轴股骨远端外侧角的参考阈值为85-90度,所述关节线汇聚角的参考阈值为0-2度,所述胫骨近端内侧角的参考阈值为85-90度,所述胫骨远端外侧角的参考阈值为86-92度。
13.进一步的,所述关节图像包括左侧髋关节区域、右侧髋关节区域、左侧膝关节区域、右侧膝关节区域、左侧踝关节区域和右侧踝关节区域;
14.所述特征轴线关键点分别是第一关键点、第二关键点、第三关键点、第四关键点、第五关键点、第六关键点、第七关键点、第八关键点;
15.所述第一关键点为左侧髋关节区域的左侧股骨头中心点,所述第二关键点为右侧髋关节区域的右侧股骨头中心点,所述第三关键点为左侧膝关节区域的左侧股骨膝关节中心点,所述第四关键点为左侧膝关节区域的左侧胫骨膝关节中心点,所述第五关键点为右侧膝关节区域的右侧股骨膝关节中心点,所述第六关键点为右侧膝关节区域的右侧胫骨膝关节中心点,所述第七关键点为左侧踝关节区域的左侧踝关节中心点,所述第八关键点为右侧踝关节区域的右侧踝关节中心点;
16.其中所述第一特征轴线的两端点分别为所述第一关键点和所述第三关键点,所述第二特征轴线的两端点分别为所述第二关键点和所述第五关键点,所述第三特征轴线的两端点分别为所述第四关键点和所述第七关键点,所述第四特征轴线的两端点分别为所述第六关键点和所述第八关键点。
17.进一步的,所述左右侧膝关节上侧走形方向线、左右侧膝关节下侧走形方向线和左右侧踝关节走形线的获取如下:
18.所述关节线关键点包括左侧膝关节区域的左侧股骨远端的股骨内、外侧髁最低点,右侧膝关节区域的右侧股骨远端的股骨内、外侧髁最低点,左侧膝关节区域的左侧胫骨近端的胫骨内外侧平台最低点,右侧膝关节区域的右侧胫骨近端的胫骨内外侧平台最低点,左侧踝关节区域的左侧胫骨远端关节面内外侧最低点,以及右侧踝关节区域的右侧胫骨远端关节面内外侧最低点;
19.所述左侧膝关节上侧走形方向线为位于左侧股骨远端的两个关节线关键点的连线;
20.右侧膝关节上侧走形方向线为位于右侧股骨远端的两个关节线关键点的连线;
21.左侧膝关节下侧走形方向线为位于左侧胫骨近端的两个关节线关键点的连线;
22.右侧膝关节下侧走形方向线为位于右侧胫骨近端的两个关节线关键点的连线;
23.左侧踝关节走形线为位于左侧胫骨远端的两个关节线关键点的连线;
24.右侧踝关节走形线为位于右侧胫骨远端的两个关节线关键点的连线。
25.一种双下肢负重位力线智能化测量方法,包括以下步骤:
26.步骤一、导入多张待测量的人体x射线下肢全长数字化照片,加载和读取预先训练好的关键点位置训练模形,选取各图片中的关节图像位置,其中所述关节图像包括左侧髋关节区域、右侧髋关节区域、左侧膝关节区域、右侧膝关节区域、左侧踝关节区域和右侧踝关节区域;
27.步骤二、使用卷积神经网络方法提取关键点
28.将步骤一获得的关节图像作为输入层使用卷积神经网络进行分类识别,获得x线片对应的关键点坐标,包括八个特征轴线关键点坐标和多个关节线关键点坐标;连接获得的八个关键点坐标绘制特征轴线,形成沿左右侧下肢延伸的四条特征轴线,包括第一特征轴线、第二特征轴线、第三特征轴线、第四特征轴线;连接关节线关键点坐标绘制六条关节线,形成左右侧膝关节上侧走形方向线、左右侧膝关节下侧走形方向线和左右侧踝关节走形线;其中第一、二特征轴线分别对应左、右侧膝关节上侧走形方向线,第三、四特征轴线分别对应左、右侧膝关节下侧走形方向线和左、右侧踝关节走形线;
29.所述特征轴线关键点分别是第一关键点、第二关键点、第三关键点、第四关键点、第五关键点、第六关键点、第七关键点、第八关键点;
30.步骤三、利用获得的关键点、特征轴线和关节线计算关键点间斜率并用反三角函数计算机械轴股骨远端外侧角、关节线汇聚角、胫骨近端内侧角和胫骨远端外侧角;其中
31.机械轴股骨远端外侧角(以下简称mldfa),包括第一特征轴线和第三关键点所在的左侧膝关节上侧走形方向线的夹角,以及第二特征轴线和第五关键点所在的右侧膝关节上侧走形方向线的夹角;夹角计算公式如下
[0032][0033]
其中,θ表示所求角度,k
13
表示第一特征轴线的斜率,k
cd
表示左侧膝关节上侧走形方向线的斜率,x1、y1表示第一关键点的横坐标和纵坐标;x3、y3表示第三关键点的横坐标和纵坐标;xc、xd、yc、yd表示左侧膝关节上侧走形方向线上两个关节线关键点的横坐标和纵坐标;通过上述正切公式,转换为互为反函数的反正切函数arctan,从而求出左侧机械轴股骨远端外侧角;相应的,根据上述公式可以获得第二特征轴线和第五关键点所在的右侧膝关节上侧走形方向线的夹角;
[0034]
关节线汇聚角(以下简称jlca),包括第三关键点所在的左侧膝关节上侧走形方向线和第四关键点所在的左侧膝关节下侧走形方向线之间的夹角,以及第五关键点所在的右侧膝关节上侧走形方向线和第六关键点所在的右侧膝关节下侧走形方向线之间的夹角;所述夹角计算步骤套用机械轴股骨远端外侧角计算公式;
[0035]
胫骨近端内侧角(以下简称mpta),包括第四关键点所在的左侧膝关节下侧走形方向线和第三特征轴线的夹角,以及第六关键点所在的右侧膝关节下侧走形方向线和第四特征轴线的夹角;所述夹角计算步骤套用机械轴股骨远端外侧角计算公式;
[0036]
胫骨远端外侧角(以下简称ldta),包括第三特征轴线和第七关键点所在的左侧踝关节走形线之间的夹角,以及第四特征轴线和第八关键点所在的右侧踝关节走形线的夹角;所述夹角计算步骤套用机械轴股骨远端外侧角计算公式;
[0037]
步骤四、结果输出和存储
[0038]
将步骤三获得的角度值与预设的机械轴股骨远端外侧角、关节线汇聚角、胫骨近端内侧角和胫骨远端外侧角的参考阈值进行比较,如果获得的角度值不在参考阈值内,则说明该角度异常,可能存在下肢畸形的情况;若均在参考阈值内,则说明不存在下肢畸形的情况;然后输出获得的角度值,将多条特征轴线和关节线体现在图片上,并以图片输出的形式呈现测量结果。
[0039]
进一步的,所述预设的机械轴股骨远端外侧角、关节线汇聚角、胫骨近端内侧角和胫骨远端外侧角的参考阈值包括:所述机械轴股骨远端外侧角的参考阈值为85-90度,所述关节线汇聚角的参考阈值为0-2度,所述胫骨近端内侧角的参考阈值为85-90度,所述胫骨远端外侧角的参考阈值为86-92度。
[0040]
进一步的,所述关键点位置训练模形为预先使用目标检测算法模型进行关键点模型训练,获得图片中所有关键点的具体位置;利用已训练好的训练模型将关键点位置信息以.mat的形式保存下来,用于之后的关键点提取。
[0041]
进一步的,所述步骤四还包括将步骤三获得的角度值进行误差分析,包括:
[0042]
根据计算夹角的三角函数公式,将其看成θ=arctan(xn)的多元函数,括号内的函数设为f,求偏导,将函数f带入,化简之后,得到以下单张x片的特征轴线关键点横纵坐标误差分析公式:
[0043][0044][0045]
其中,xn是所述特征轴线关键点的横坐标,yn是所述特征轴线关键点的纵坐标。
[0046]
根据上述公式依次获得特征轴线关键点的误差值;再将多张x片获得的误差值统计分析结果绘制成折线图,供用户进行分析。
[0047]
进一步的,所述步骤四还包括将步骤三获得的角度值记录在预先初始化的excel表格中。
[0048]
与现有技术相比,本发明的技术方案所带来的有益效果是:
[0049]
本发明基于解剖学理论,结合图像学领域的形态特征辨识提取技术,利用卷积神经网络等深度学习技术与数字图像处理技术对人体下肢全长图像进行处理,完成双下肢负重位x线片中股骨头中心拟合、膝关节边界提取、边界线拟合、交点提取等,快速精准的实现下肢机械轴、下肢力线及关节角度的绘制与计算;
[0050]
考虑到关键点坐标误差难以缩小,本发明无须精确的关键点坐标,针对膝关节走形方向线和踝关节线,以斜率替代点坐标,使用arctan反三角函数计算角度,从而明显降低角度计算误差;
[0051]
本发明不但可以承担繁琐的畸形筛查工作,迅速地从影像数据中提取出与诊断相关的信息,减少诊断操作时长、提高医疗资源利用率,而且该系统可间接提升下肢畸形矫正
手术的成功率,避免因诊断误差导致畸形矫正不足或矫枉过正,降低再手术风险,减少患者经济负担,使临床骨科畸形矫正实现精准化与智能化目标有效降低医疗风险,从根本上提高医疗质量。
附图说明
[0052]
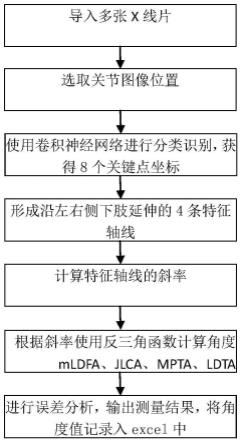
图1是本发明所述的双下肢负重位力线智能化测量系统的流程图;
[0053]
图2是本发明实施例的实验数据集采集并标示出测量结果的具有不同形态下肢的x线片;其中,图2a是患者a的下肢x线片,图2b是患者b的下肢x线片,图2c是患者c的下肢x线片,图2d是患者d的下肢x线片;
[0054]
图3是步骤四获得的误差统计分析结果绘制的折线图;
[0055]
图4是本发明所述的双下肢负重位力线智能化测量方法的流程图;
[0056]
图5是步骤二中使用的卷积神经网络结构图;
[0057]
图6a示出左侧膝关节上下侧走形方向线;图6b是左侧踝关节走形线。
[0058]
图中:
[0059]
1:第一关键点2:第二关键点3:第三关键点
[0060]
4:第四关键点5:第五关键点6:第六关键点
[0061]
7:第七关键点8:第八关键点9:第一特征轴线
[0062]
10:第二特征轴线11:第三特征轴线12:第四特征轴线
[0063]
13:膝关节上侧走形方向线14:膝关节下侧走形方向线
[0064]
15:踝关节走形线
具体实施方式
[0065]
下面结合附图和具体实施例对本发明的技术方案作进一步详细描述,所描述的具体的实施例仅对本发明进行解释说明,并不用以限制本发明。
[0066]
本发明实施例提出了一种双下肢负重位力线测量及诊断系统及智能化测量方法,本发明基于解剖学理论,结合图像学领域的形态特征辨识提取技术,不但可以承担繁琐的畸形筛查工作,迅速地从x线片影像数据中提取出与诊断相关的信息,减少诊断操作时长、提高医疗资源利用率,而且该系统可间接提升下肢畸形矫正手术的成功率,避免因诊断误差导致畸形矫正不足或矫枉过正,降低再手术风险。
[0067]
如图1所示,一种双下肢负重位力线测量及诊断系统,包括:数据加载模块、关键点选取模块、角度计算模块和力线诊断和输出模块。各模块的具体运行包括如图4所示的如下步骤:
[0068]
步骤一:数据训练与加载
[0069]
预先选择多张天津市天津医院pacs系统收集的负重位拍摄且各关键点能够清晰识别的完整下肢全长x线片,使用matlab的ginput()函数标注出每张图片中的关键点位置信息(ground truth),将多种不同形态下肢的图像和对应标注的关键点位置信息作为本发明的实验数据集。将实验数据集导入目标检测算法模型进行模型训练,在进行多轮次的训练后,获得图片中所有关键点的具体位置;将已训练好的训练模型以.mat形式保存下来,用于之后的图像处理训练和实际应用中的关键点位置提取。
[0070]
加载并读取训练集关键点位置信息的.mat文件,初始化excel表格用于记录结果,利用循环依次读取多张如图2a,2b,2c,2d所示的待测量的患者a、b、c、d的人体x射线下肢全长数字化照片(以下简称x线片),并对每张x线片进行计数和命名。之后,由于每张x线片的拍摄标准均一致,因此各关节在x线片上的位置差距不大,读入后的x线片自动建立二维平面坐标系,通过四个固定坐标点确定一个固定选区的方法,采用固定区域定位的方法选取各图片中的关节图像位置,其中所述关节图像包括左侧髋关节区域、右侧髋关节区域、左侧膝关节区域、右侧膝关节区域、左侧踝关节区域和右侧踝关节区域。
[0071]
步骤二:关键点选取
[0072]
s201:由于步骤一获得的关节图像区域截取自像素一致的x线片,因此各区域的特征矩阵相同。分别针对双下肢的不同关节图像,使用卷积神经网络进行分类识别,先进行线性判别分析,然后再进行选点预测对比从而获得关键点。具体的,如图5所示,分别将步骤一获得的六个关节图像区域作为输入层使用卷积神经网络方法进行运算,首先采用3*3*8的卷积核进行卷积运算,获得最大池化层后,经过5次卷积,执行dropout,在全连接层将所有最终数据进行线性变换,在其后的softmax层输出所述区域的预测标签,将线性变换后的结果映射到对应的分类上,从而实现坐标分类,输出x线片对应的关键点坐标,并以double的格式用变量暂存数据,用于后续计算角度。本实施例中共有8个特征轴线关键点坐标和12个关节线关键点坐标。
[0073]
其中,8个特征轴线关键点,分别是第一关键点1、第二关键点2、第三关键点3、第四关键点4、第五关键点5、第六关键点6、第七关键点7、第八关键点8。第一关键点1为左侧髋关节区域的左侧股骨头中心点,第二关键点2为右侧髋关节区域的右侧股骨头中心点,第三关键点3为左侧膝关节区域的左侧股骨膝关节中心点,第四关键点4为左侧膝关节区域的左侧胫骨膝关节中心点,第五关键点5为右侧膝关节区域的右侧股骨膝关节中心点,第六关键点6为右侧膝关节区域的右侧胫骨膝关节中心点,第七关键点7为左侧踝关节区域的左侧踝关节中心点,第八关键点8为右侧踝关节区域的右侧踝关节中心点。
[0074]
如图6a,6b所示,12个关节线关键点分别是左侧膝关节区域的左侧股骨远端的股骨内、外侧髁最低点c,d,右侧膝关节区域的右侧股骨远端的股骨内、外侧髁最低点c,d(图中未示出),左侧膝关节区域的左侧胫骨近端的胫骨内外侧平台最低点e,f,右侧膝关节区域的右侧胫骨近端的胫骨内外侧平台最低点e,f(图中未示出),左侧踝关节区域的左侧胫骨远端关节面内外侧最低点h,i,以及右侧踝关节区域的右侧胫骨远端关节面内外侧最低点h,i(图中未示出)。
[0075]
s202:建立特征轴线
[0076]
连接获得的八个特征轴线关键点坐标绘制特征轴线,形成沿左右侧下肢延伸的四条特征轴线,再转换到图像语言,包括第一特征轴线9、第二特征轴线10、第三特征轴线11、第四特征轴线12,其中第一特征轴线9的两端点分别为第一关键点1和第三关键点3,第二特征轴线10的两端点分别为第二关键点2和第五关键点5,第三特征轴线11的两端点分别为第四关键点4和第七关键点7,第四特征轴线12的两端点分别为第六关键点6和第八关键点8。连接左侧股骨远端的股骨内、外侧髁最低点c,d形成左侧膝关节上侧走形方向线13,连接左侧胫骨近端的胫骨内外侧平台最低点e,f形成左侧膝关节下侧走形方向线14,连接左侧胫骨远端关节面内外侧最低点h,i左侧踝关节走形线15;以同样方法能够获得右侧膝关节上
侧走形方向线13、右侧膝关节下侧走形方向线14和右侧踝关节走形线15。
[0077]
其中第一、二特征轴线对应左右侧膝关节上侧走形方向线13,第三、四特征轴线对应左右侧膝关节下侧走形方向线14和左右侧踝关节走形线15。由于图2b,2c,2d的附图标记的位置与图2a相同,因此只在图2a上标注附图标记。
[0078]
步骤三:角度计算
[0079]
利用获得的关键点和特征轴线计算关键点间斜率和用反三角函数计算机械轴股骨远端外侧角、关节线汇聚角、胫骨近端内侧角和胫骨远端外侧角。
[0080]
本步骤的关键在于膝关节走形方向线和踝关节线,减小点的坐标误差可以明显降低角度计算误差;考虑到关键点坐标误差难以缩小,因此本发明以斜率替代点坐标,使用arctan反三角函数计算角度,可以明显降低角度计算误差。
[0081]
其中角度计算方式如下:
[0082]
机械轴股骨远端外侧角(以下简称mldfa),包括第一特征轴线9和第三关键点3所在的左侧股骨远端关节走形线的夹角,以及第二特征轴线10和第五关键点5所在的右侧股骨远端关节走形线的夹角;其中夹角的计算公式如下:
[0083][0084]
其中,θ表示所求角度,k
13
表示第一特征轴线9的斜率,k
cd
表示左侧膝关节上侧走形方向线13的斜率,x1、y1表示第一关键点1的横坐标和纵坐标;x3、y3表示第三关键点3的横坐标和纵坐标;xc、xd、yc、yd表示左侧膝关节上侧走形方向线13上两个关节线关键点的横坐标和纵坐标;通过上述正切公式,转换为互为反函数的反正切函数arctan,从而求出左侧mldfa角度θ。相应的,根据上述公式可以获得第二特征轴线10和第五关键点5所在的右侧膝关节上侧走形方向线13的夹角。
[0085]
关节线汇聚角(以下简称jlca),包括第三关键点3所在的左侧膝关节上侧走形方向线13和第四关键点4所在的左侧膝关节下侧走形方向线14之间的夹角,以及第五关键点5所在的右侧膝关节上侧走形方向线13和第六关键点6所在的右侧膝关节下侧走形方向线14之间的夹角;其中夹角的计算公式套用mldfa的计算公式,也是通过膝关节上侧走形方向线13和膝关节下侧走形方向线14上两个关节线关键点的坐标,计算这两条走形线的斜率,利用三角函数求出其正切值后,再转换为反正切函数arctan,从而求出左侧和右侧的两个关节线汇聚角。
[0086]
胫骨近端内侧角(以下简称mpta),包括第四关键点4所在的左侧膝关节下侧走形方向线14和第三特征轴线11的夹角,以及第六关键点6所在的右侧膝关节下侧走形方向线14和第四特征轴线12的夹角;其中夹角的计算公式套用上述mldfa的计算公式,也是通过第三特征轴线11所在的两个端点(即第四关键点4和第七关键点7)的坐标和左侧膝关节下侧走形方向线14的两个关节线关键点的坐标,计算斜率,利用三角函数求出其正切值后,再转换为反正切函数arctan,从而求出左侧胫骨近端内侧角的角度;以及通过第四特征轴线12所在的两个端点(即第六关键点6和第八关键点8)的坐标和右侧膝关节下侧走形方向线14的两个关节线关键点的坐标,计算斜率,利用三角函数求出其正切值后,再转换为反正切函数arctan,从而求出右侧胫骨近端内侧角的角度。
[0087]
胫骨远端外侧角(以下简称ldta),包括第三特征轴线11和第七关键点7所在的左侧踝关节走形线15之间的夹角,以及第四特征轴线12和第八关键点8所在的右侧踝关节走形线15的夹角。其中夹角的计算公式套用mldfa的计算公式,也是通过第三特征轴线11所在的两个端点(即第四关键点4和第七关键点7)的坐标和左侧踝关节走形线的两个关节线关键点的坐标,计算斜率,利用三角函数求出其正切值后,再转换为反正切函数arctan,从而求出左侧左侧胫骨远端外侧角的角度;以及通过第四特征轴线12所在的两个端点(即第六关键点6和第八关键点8)的坐标和右侧踝关节走形线15的两个关节线关键点的坐标,计算斜率,利用三角函数求出其正切值后,再转换为反正切函数arctan,从而求出右侧胫骨远端外侧角的角度。
[0088]
步骤四、误差分析和结果输出和存储
[0089]
根据上面的三角函数公式,根据计算夹角的三角函数公式,将其看成θ=arctan(xn)的多元函数,括号内的函数设为f,求偏导,将函数f带入,化简之后,得到以下单张x片的第三特征轴线关键点横纵坐标误差分析公式:
[0090][0091][0092]
其中,x3是所述特征轴线关键点的横坐标,y3是所述特征轴线关键点的纵坐标。从而获得第三特征轴线关键点的误差值;再根据上述公式依次获得其余特征轴线关键点的误差值;重复上述步骤直至获得输入的所有x片的误差值后,将多个误差值作为误差统计分析结果绘制成如图3所示的折线图,将mldfa、jlca、mpta、ldta值和多条特征轴线体现在图片上,并以图片输出的形式呈现测量结果,并将角度记录入excel中。根据输出的结果作为判断依据,通过专家系统分类推理,输出畸形的诊断结果,从而为患者提出合理精准的矫正方法。
[0093]
尽管上面结合附图对本发明的功能及工作过程进行了描述,但本发明并不局限于上述的具体功能和工作过程,上述的具体实施方式仅为示意性,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可以做出很多形式,这些均属于本发明的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。