技术特征:
1.一种双下肢负重位力线测量及诊断系统,包括数据加载模块,用于加载和读取训练集关键点位置信息的.mat数据文件、待测量x线片,选取各图片中关节图像位置;关键点选取模块,针对数据加载模块选取的关节图像位置,将获得的关节图像作为输入层使用卷积神经网络进行分类识别,获得x线片对应的关键点坐标,包括八个特征轴线关键点坐标和多个关节线关键点坐标;连接获得的八个关键点坐标绘制特征轴线,形成沿左右侧下肢延伸的四条特征轴线,包括第一特征轴线(9)、第二特征轴线(10)、第三特征轴线(11)、第四特征轴线(12);连接关节线关键点坐标绘制六条关节线,形成左、右侧膝关节上侧走形方向线(13)、左、右侧膝关节下侧走形方向线(14)和左、右侧踝关节走形线(15);其中第一、二特征轴线分别对应左右侧膝关节上侧走形方向线(13),第三、四特征轴线分别对应左右侧膝关节下侧走形方向线(14)和左右侧踝关节走形线(15);角度计算模块,利用获得的关键点、特征轴线和关节线计算关键点间斜率并用反三角函数计算机械轴股骨远端外侧角、关节线汇聚角、胫骨近端内侧角和胫骨远端外侧角;力线诊断及输出模块:根据角度计算模块获得的角度,将获得的角度值与预设的机械轴股骨远端外侧角、关节线汇聚角、胫骨近端内侧角和胫骨远端外侧角的参考阈值进行比较,如果获得的角度值不在参考阈值内,则说明该角度异常,可能存在下肢畸形的情况;若均在参考阈值内,则说明不存在下肢畸形的情况;然后输出获得的角度值,将多条特征轴线和关节线体现在x片上,并以图片输出的形式呈现测量结果。2.根据权利要求1所述的双下肢负重位力线测量及诊断系统,其特征在于,所述预设的机械轴股骨远端外侧角、关节线汇聚角、胫骨近端内侧角和胫骨远端外侧角的参考阈值包括:所述机械轴股骨远端外侧角的参考阈值为85-90度,所述关节线汇聚角的参考阈值为0-2度,所述胫骨近端内侧角的参考阈值为85-90度,所述胫骨远端外侧角的参考阈值为86-92度。3.根据权利要求1所述的双下肢负重位力线测量及诊断系统,其特征在于,所述关节图像包括左侧髋关节区域、右侧髋关节区域、左侧膝关节区域、右侧膝关节区域、左侧踝关节区域和右侧踝关节区域;所述特征轴线关键点分别是第一关键点(1)、第二关键点(2)、第三关键点(3)、第四关键点(4)、第五关键点(5)、第六关键点(6)、第七关键点(7)、第八关键点(8);所述第一关键点(1)为左侧髋关节区域的左侧股骨头中心点,所述第二关键点(2)为右侧髋关节区域的右侧股骨头中心点,所述第三关键点(3)为左侧膝关节区域的左侧股骨膝关节中心点,所述第四关键点(4)为左侧膝关节区域的左侧胫骨膝关节中心点,所述第五关键点(5)为右侧膝关节区域的右侧股骨膝关节中心点,所述第六关键点(6)为右侧膝关节区域的右侧胫骨膝关节中心点,所述第七关键点(7)为左侧踝关节区域的左侧踝关节中心点,所述第八关键点(8)为右侧踝关节区域的右侧踝关节中心点;其中所述第一特征轴线(9)的两端点分别为所述第一关键点(1)和所述第三关键点(3),所述第二特征轴线(10)的两端点分别为所述第二关键点(2)和所述第五关键点(5),所述第三特征轴线(11)的两端点分别为所述第四关键点(4)和所述第七关键点(7),所述第四特征轴线(12)的两端点分别为所述第六关键点(6)和所述第八关键点(8)。4.根据权利要求1所述的双下肢负重位力线测量及诊断系统,其特征在于,所述关节线
关键点包括左侧膝关节区域的左侧股骨远端的股骨内、外侧髁最低点,右侧膝关节区域的右侧股骨远端的股骨内、外侧髁最低点,左侧膝关节区域的左侧胫骨近端的胫骨内外侧平台最低点,右侧膝关节区域的右侧胫骨近端的胫骨内外侧平台最低点,左侧踝关节区域的左侧胫骨远端关节面内外侧最低点,以及右侧踝关节区域的右侧胫骨远端关节面内外侧最低点;所述左右侧膝关节上侧走形方向线(13)、左右侧膝关节下侧走形方向线(14)和左右侧踝关节走形线(15)的获取如下:所述左侧膝关节上侧走形方向线(13)为位于左侧股骨远端的两个关节线关键点的连线;右侧膝关节上侧走形方向线(13)为位于右侧股骨远端的两个关节线关键点的连线;左侧膝关节下侧走形方向线(14)为位于左侧胫骨近端的两个关节线关键点的连线;右侧膝关节下侧走形方向线(14)为位于右侧胫骨近端的两个关节线关键点的连线;左侧踝关节走形线(15)为位于左侧胫骨远端的两个关节线关键点的连线;右侧踝关节走形线(15)为位于右侧胫骨远端的两个关节线关键点的连线。5.根据权利要求1所述的双下肢负重位力线测量及诊断系统,其特征在于,所述关键点位置训练模形为预先使用目标检测算法模型进行关键点模型训练,获得图片中所有关键点的具体位置;利用已训练好的训练模型将关键点位置信息以.mat的形式保存下来,用于之后的关键点提取。6.一种双下肢负重位力线智能化测量方法,包括以下步骤:步骤一、导入多张待测量的人体x射线下肢全长数字化照片,加载和读取预先训练好的关键点位置训练模形,选取各图片中的关节图像位置,其中所述关节图像包括左侧髋关节区域、右侧髋关节区域、左侧膝关节区域、右侧膝关节区域、左侧踝关节区域和右侧踝关节区域;步骤二、使用卷积神经网络方法提取关键点将步骤一获得的关节图像作为输入层使用卷积神经网络进行分类识别,获得x线片对应的关键点坐标,包括八个特征轴线关键点坐标和多个关节线关键点坐标;连接获得的八个关键点坐标绘制特征轴线,形成沿左右侧下肢延伸的四条特征轴线,包括第一特征轴线(9)、第二特征轴线(10)、第三特征轴线(11)、第四特征轴线(12);连接关节线关键点坐标绘制六条关节线,形成左右侧膝关节上侧走形方向线(13)、左右侧膝关节下侧走形方向线(14)和左右侧踝关节走形线(15);其中第一、二特征轴线分别对应左、右侧膝关节上侧走形方向线,第三、四特征轴线分别对应左、右侧膝关节下侧走形方向线和左、右侧踝关节走形线;所述特征轴线关键点分别是第一关键点(1)、第二关键点(2)、第三关键点(3)、第四关键点(4)、第五关键点(5)、第六关键点(6)、第七关键点(7)、第八关键点(8);步骤三、利用获得的关键点、特征轴线和关节线计算关键点间斜率并用反三角函数计算机械轴股骨远端外侧角、关节线汇聚角、胫骨近端内侧角和胫骨远端外侧角;其中机械轴股骨远端外侧角,包括所述第一特征轴线(9)和所述第三关键点(3)所在的左侧膝关节上侧走形方向线(13)的夹角,以及所述第二特征轴线(10)和所述第五关键点(5)所在的右侧膝关节上侧走形方向线(13)的夹角;夹角计算公式如下
其中,θ表示所求角度,k
13
表示第一特征轴线(9)的斜率,k
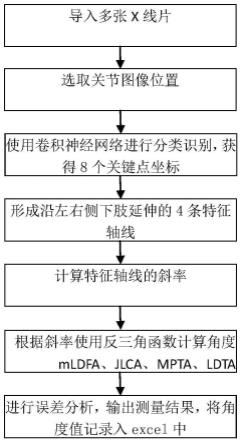
cd
表示左侧膝关节上侧走形方向线(13)的斜率,x1、y1表示第一关键点(1)的横坐标和纵坐标;x3、y3表示第三关键点(3)的横坐标和纵坐标;x
c
、x
d
、y
c
、y
d
表示左侧膝关节上侧走形方向线(13)上两个关节线关键点的横坐标和纵坐标;通过上述正切公式,转换为互为反函数的反正切函数arctan,从而求出左侧机械轴股骨远端外侧角;相应的,根据上述公式可以获得第二特征轴线(10)和第五关键点(5)所在的右侧膝关节上侧走形方向线(13)的夹角;关节线汇聚角,包括所述第三关键点(3)所在的左侧膝关节上侧走形方向线(13)和第四关键点(4)所在的左侧膝关节下侧走形方向线(14)之间的夹角,以及第五关键点(5)所在的右侧膝关节上侧走形方向线(13)和第六关键点(6)所在的右侧膝关节下侧走形方向线(14)之间的夹角;所述夹角计算步骤套用机械轴股骨远端外侧角计算公式;胫骨近端内侧角,包括所述第四关键点(4)所在的左侧膝关节下侧走形方向线(14)和第三特征轴线(11)的夹角,以及第六关键点(6)所在的右侧膝关节下侧走形方向线(14)和第四特征轴线(12)的夹角;所述夹角计算步骤套用机械轴股骨远端外侧角计算公式;胫骨远端外侧角,包括所述第三特征轴线(11)和所述第七关键点(7)所在的左侧踝关节走形线(15)之间的夹角,以及第四特征轴线(12)和第八关键点(8)所在的右侧踝关节走形线(15)的夹角;所述夹角计算步骤套用机械轴股骨远端外侧角计算公式;步骤四、结果输出和存储将步骤三获得的角度值和多条特征轴线和关节线体现在图片上,并以图片输出的形式呈现测量结果。7.根据权利要求6所述的双下肢负重位力线智能化测量方法,其特征在于,所述关键点位置训练模形为预先使用目标检测算法模型进行关键点模型训练,获得图片中所有关键点的具体位置;利用已训练好的训练模型将关键点位置信息以.mat的形式保存下来,用于之后的关键点提取。8.根据权利要求6所述的双下肢负重位力线智能化测量方法,其特征在于,所述步骤四还包括将步骤三获得的角度值进行误差分析,包括:根据计算夹角的三角函数公式,将其看成θ=arctan(x
n
)的多元函数,括号内的函数设为f,求偏导,将函数f带入,化简之后,得到以下单张x片的特征轴线关键点横纵坐标误差分析公式:析公式:其中,x
n
是所述特征轴线关键点的横坐标,y
n
是所述特征轴线关键点的纵坐标;根据上述公式依次获得特征轴线关键点的误差值;再将多张x片获得的误差值统计分析结果绘制成折线图,供用户进行分析。9.根据权利要求6所述的双下肢负重位力线智能化测量方法,其特征在于,所述步骤四
还包括将步骤三获得的角度值记录在预先初始化的excel表格中。
技术总结
本发明公开一种双下肢负重位力线测量及诊断系统,包括数据加载模块、关键点选取模块、角度计算模块和力线诊断和输出模块,其中角度计算模块利用获得的关键点、特征轴线和关节线计算关键点间斜率并用反三角函数计算机械轴股骨远端外侧角、关节线汇聚角、胫骨近端内侧角和胫骨远端外侧角;力线诊断及输出模块根据获得的角度与预设值进行比较判断是否存在下肢畸形。还公开了一种双下肢负重位力线智能化测量方法。本发明无须精确的关键点坐标,针对膝关节走形方向线和踝关节线,以斜率替代点坐标,使用arctan反三角函数计算角度,从而明显降低角度计算误差,避免因诊断误差导致畸形矫正不足或矫枉过正,降低再手术风险。降低再手术风险。降低再手术风险。
技术研发人员:马信龙 马剑雄 武志超 朱新军 柏豪豪 王颖 卢斌 孙磊 靳洪震
受保护的技术使用者:天津市天津医院
技术研发日:2022.03.17
技术公布日:2022/7/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。