技术特征:
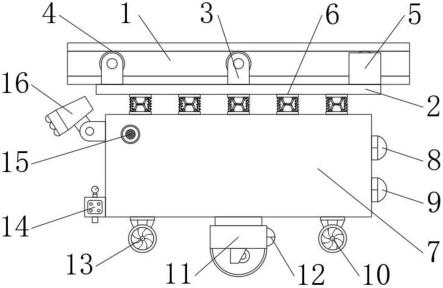
1.一种矿用智能巡检机器人,包括行走机器人本体(7),其特征在于:所述行走机器人本体(7)上端固定设置有多个减震连接座(6),多个所述减震连接座(6)上端固定连接有固定板(2),所述固定板(2)上端固定设置有六个安装座(3),四个所述安装座(3)上均转动设置有辅助行走轮(4),两个所述安装座(3)侧边均固定设置有电机箱(5),两个所述电机箱(5)内部均固定设置有转动电机(22),两个所述转动电机(22)的输出端均固定连接有传动轴(23),两个所述传动轴(23)端部均穿过两个安装座(3)并固定连接有主动轮(24);所述行走机器人本体(7)一侧壁中部固定设置有温湿度传感器(8)和粉尘浓度传感器(9),所述行走机器人本体(7)远离温湿度传感器(8)和粉尘浓度传感器(9)的侧壁下端固定设置有噪声传感器(14),所述行走机器人本体(7)下端两侧分别固定设置有co浓度传感器(10)和瓦斯浓度传感器(13),所述行走机器人本体(7)下端中部转动设置有旋转摄像头(11);所述行走机器人本体(7)内部上端固定设置有电机驱动器(18)、智能控制器(19)和信号集成收发装置(20),所述行走机器人本体(7)内部下端两侧均固定设置有蓄电池(17),所述行走机器人本体(7)内部下端中间固定设置有旋转电机(21),所述旋转电机(21)的输出端与旋转摄像头(11)固定连接。2.根据权利要求1所述的一种矿用智能巡检机器人,其特征在于:四个所述辅助行走轮(4)和两个主动轮(24)均在行走轨道(1)上限位移动。3.根据权利要求1所述的一种矿用智能巡检机器人,其特征在于:所述减震连接座(6)包括两个减震板(25),两个所述减震板(25)上均固定设置有两个铰接座(26),四个所述铰接座(26)上均转动连接有减震杆(27),四个所述减震杆(27)在同一侧的两个之间转动连接,四个所述减震杆(27)转动连接处固定连接有减震弹簧(28)。4.根据权利要求3所述的一种矿用智能巡检机器人,其特征在于:两个所述减震板(25)两端之间均固定连接有弹簧减震柱(29)。5.根据权利要求1所述的一种矿用智能巡检机器人,其特征在于:所述旋转摄像头(11)上固定设置有辅助照明灯(12)。6.根据权利要求1所述的一种矿用智能巡检机器人,其特征在于:所述行走机器人本体(7)侧壁上端固定设置有充电接口(15),所述充电接口(15)与两个蓄电池(17)固定连接。7.根据权利要求1所述的一种矿用智能巡检机器人,其特征在于:所述行走机器人本体(7)远离温湿度传感器(8)和粉尘浓度传感器(9)的侧壁上端固定设置有行进摄像头(16)。8.根据权利要求1所述的一种矿用智能巡检机器人,其特征在于:所述智能控制器(19)与温湿度传感器(8)、粉尘浓度传感器(9)、co浓度传感器(10)、旋转摄像头(11)、辅助照明灯(12)、瓦斯浓度传感器(13)、噪声传感器(14)、行进摄像头(16)、电机驱动器(18)、信号集成收发装置(20)、旋转电机(21)和转动电机(22)均电性连接。
技术总结
本实用新型公开了一种矿用智能巡检机器人,包括行走机器人本体,所述行走机器人本体上端固定设置有多个减震连接座,多个所述减震连接座上端固定连接有固定板,所述固定板上端固定设置有六个安装座,四个所述安装座上均转动设置有辅助行走轮,两个所述安装座侧边均固定设置有电机箱,两个所述电机箱内部均固定设置有转动电机,两个所述转动电机的输出端均固定连接有传动轴,两个所述传动轴端部均穿过两个安装座并固定连接有主动轮。本实用新型公开了一种矿用智能巡检机器人,该巡检机器人能够远距离、智能化、自动化、无人化的检测矿井内部的状态,有效降低工作人员的劳动强度,使矿山的安全生产得到更高的保障。的安全生产得到更高的保障。的安全生产得到更高的保障。
技术研发人员:高守乐 王献伟 李靖 李鹏
受保护的技术使用者:江苏珂尔玛智控技术有限公司
技术研发日:2022.02.07
技术公布日:2022/7/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。