一种h钢旋转焊接工装
技术领域
1.本实用新型属于h钢技术领域,涉及一种h钢旋转焊接工装。
背景技术:
2.h钢通过焊接而成,但是由于h钢质量较大、长度较长,焊接时不便于工人操作,工件焊接一般都需要进行点焊和成焊,h钢成焊时,需要改变几次方位,且为了保证焊缝的质量,一般需要将h钢一端吊起,以防止出现焊缝下移等缺陷,目前并没有适用于h钢焊接的工装,且如何提高焊接效率和实现焊接自动化,也是我们改进的方向。
技术实现要素:
3.本实用新型提供一种h钢旋转焊接工装,可以解决背景技术中所指出的问题。
4.一种h钢旋转焊接工装,包括底座架体、举升架架体、转盘座总成、动力旋转机构、旋转夹具以及焊接机器人;
5.沿所述举升架架体长度方向设置至少一个转盘座总成,所述转盘座总成包括转动盘以及转动盘座,所述转动盘用于工件的限位、固定,并带动其同步旋转,所述转动盘座为所述转动盘提供旋转支撑,使其可以相对转动盘座旋转,所述转动盘座固定在所述举升架架体;
6.所述动力旋转机构输出端连接旋转夹具,带动旋转夹具旋转,所述旋转夹具用于夹住固定工件,使其跟随动力旋转机构旋转,改变方位。
7.优选的,所述举升架架体一端铰接连接在所述底座架体上,所述举升架架体与所述底座架体之间设有举升动力机构,所述举升动力机构用于举升举升架架体。
8.优选的,所述举升动力机构包括支撑架、滑动连接座、驱动元件,所述驱动元件与滑动连接座连接,驱动其沿底座架体长度方向往复运动,所述滑动连接座滑动连接在所述底座架体上,所述支撑架下端铰接在所述滑动连接座上,上端铰接在所述举升架架体上。
9.优选的,所述驱动元件为气缸或油缸,所述滑动连接座两侧均设有导向轮组,所述底座架体对应位置设有与导向轮组配合的导轨。
10.优选的,所述转动盘包括下旋转盘以及上旋转盘,所述下旋转盘以及上旋转盘可拆卸连接,两者对合后形成工件限位框。
11.优选的,所述转动盘座沿圆周方向分布若干个导轮,所述导轮为所述转动盘提供旋转支撑。
12.优选的,所述动力旋转机构为变位机,所述变位机固定在所述举升架架体。
13.优选的,所述动力旋转夹具包括法兰盘以及夹紧装置。
14.优选的,所述夹紧装置包括分布在法兰盘上的轴销,所述轴销穿设在所述法兰盘上,可做轴向旋转以及长度方向往复运动,所述轴销外侧一端连接压块,其内侧一端连接旋转块,所述法兰盘上固定设有固定块,所述固定块与所述旋转块一一对应设置,所述固定块与所述旋转块的对应面上分别设有相互配合的第一斜切面和第二斜切面。
15.优选的,所述旋转块上连接手柄。
16.有益效果:本实用新型提供一种h钢旋转焊接工装,通过旋转工作可改变h钢的焊接方位,再配合焊接机器人进行相应焊接,可实现焊接的高度自动化,提高焊接效率,便于工人操作,能够提高焊接质量,也在一定程度上降低了人工成本。
附图说明
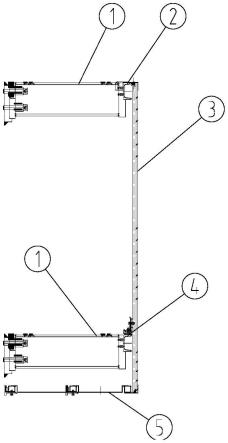
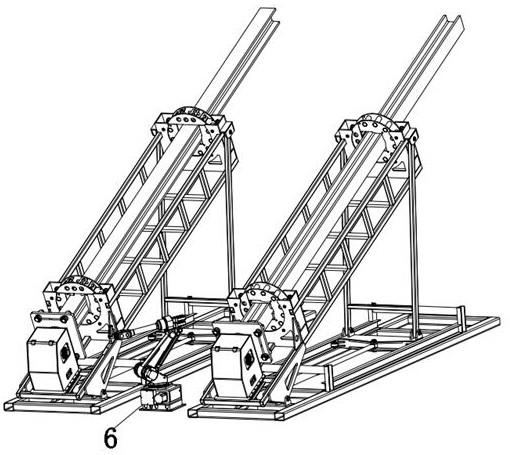
17.图1为本实用新型整体结构示意图。
18.图2为本实用新型结构示意图举升状态。
19.图3为本实用新型图2中a处的结构示意图。
20.图4为本实用新型图2中b处的结构示意图。
21.图5为本实用新型结构示意图收起状态。
22.图6为本实用新型转盘座总成处的结构示意图。
23.图7为本实用新型旋转夹具的结构示意图图一。
24.图8为本实用新型旋转夹具的结构示意图图二。
25.附图标记说明:
26.图中标号:底座架体1;举升架架体2;转盘座总成3;转动盘座31;导轮311;转动盘32;下旋转盘321;上旋转盘322;限位框323;动力旋转机构4;旋转夹具5;法兰盘51;夹紧装置52;轴销521;压块522;旋转块523;固定块524;第一斜切面525;第二斜切面526;手柄527;焊接机器人6;举升动力机构7;支撑架71;滑动连接座72;驱动元件73;导向轮组74;导轨75。
具体实施方式
27.下面结合附图,对本实用新型的一个具体实施方式进行详细描述,但应当理解本实用新型的保护范围并不受具体实施方式的限制。
28.实施例1:
29.如图1-8所示,一种h钢旋转焊接工装,包括底座架体1、举升架架体2、转盘座总成3、动力旋转机构4、旋转夹具5以及焊接机器人6;
30.沿举升架架体2长度方向设置至少一个转盘座总成3,转盘座总成3的数量可根据工件8长度进行相应设置,转盘座总成3包括转动盘32以及转动盘座31,转动盘32用于工件8的限位、固定,并带动其同步旋转,转动盘座31为转动盘32提供旋转支撑,使其可以相对转动盘座31旋转,转动盘座31固定在举升架架体2;
31.具体的,转动盘座31沿圆周方向分布若干个导轮311,导轮311为转动盘32提供旋转支撑,转动盘座31上具有弧形限位槽,转动盘32通过弧形限位槽限位,转动盘32包括下旋转盘321以及上旋转盘322,下旋转盘321以及上旋转盘322可拆卸连接,两者对合后形成工件限位框323,可采用如下结构实现两者的可拆卸连接,以方便工件8的置入,上旋转盘322的一端通过轴销铰接连接在下旋转盘321的一端,其另一端可采用插销方式实现两者的可拆卸连接,上旋转盘322和下旋转盘321对应位置设有供插销插入的对应插入孔,插销插入插入孔,将上旋转盘322和下旋转盘321固定连接形成稳定的限位整体,需要置入工件8或取走工件8时,则需要将插销拔出,打开上旋转盘322,置入或取走工件8即可,当然,不限于其他可拆卸的连接方式。
32.动力旋转机构4输出端连接旋转夹具5,带动旋转夹具5旋转,旋转夹具5用于夹住固定工件8,使其跟随动力旋转机构4旋转,改变方位,具体的,动力旋转机构4为变位机,变位机固定在举升架架体2变位机即包括电机以及减速机,电机最好选用伺服电机,动力旋转夹具5包括法兰盘51以及夹紧装置52,减速机的动力输出端连接法兰盘51,带动法兰盘51旋转,法兰盘51上设有夹紧装置52,夹紧装置52用于固定工件8。
33.夹紧装置52可以为常见的机械夹具,能够夹住h钢的底盘即可,且不妨碍旋转,本实施例也提供一种结构简单,方便使用的夹紧装置52,夹紧装置52包括分布在法兰盘51上的轴销521,轴销521穿设在法兰盘51上,可做轴向旋转以及长度方向往复运动,轴销521外侧一端连接压块522,其内侧一端连接旋转块523,法兰盘51上固定设有固定块524,固定块524与旋转块523一一对应设置,固定块524与旋转块523的对应面上分别设有相互配合的第一斜切面525和第二斜切面526,旋转块523上连接手柄527,通过手柄527,方便驱动旋转块523转动,本夹紧装置52的工作原理:拨动手柄527,驱动旋转块523转动,旋转块523以及固定块524旋切错开,在第一斜切面525和第二斜切面526的作用下,拉动轴销521向内侧移动,带动压块522压紧h钢的底盘;反之,拉动轴销521向外侧移动,带动压块522放开h钢的底盘。
34.实施例2:
35.如图2、图4、图5,在实施例1的基础上,为了避免焊缝下移的焊接缺陷,一般h钢焊接时一端需要抬升,为了实现一端的抬升,举升架架体2一端铰接连接在底座架体1上,举升架架体2与底座架体1之间设有举升动力机构7,举升动力机构7用于举升举升架架体2,
36.具体的,举升动力机构7包括支撑架71、滑动连接座72、驱动元件73,驱动元件73与滑动连接座72连接,驱动其沿底座架体1长度方向往复运动,滑动连接座72滑动连接在底座架体1上,支撑架71下端铰接在滑动连接座72上,上端铰接在举升架架体2上,驱动元件73为气缸或油缸,滑动连接座72两侧均设有导向轮组74,底座架体1对应位置设有与导向轮组74配合的导轨75,驱动元件73驱动滑动连接座72往复运动,从而改变支撑架71的支撑角度,从而最终改变举升架架体2,以使工件8在相应焊接角度上。
37.本实用新型的工作原理或操作方法:本实用新型的焊接机器人6、动力旋转机构4、举升动力机构7三者联动,在自动化程序上,三者配合动作,动力旋转机构4旋转改变工件8方位,焊接机器人6完成一面焊接,直到完成所有焊接点的焊接。
38.以上公开的仅为本实用新型的几个具体实施例,但是,本实用新型实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。