1.本发明涉及高空清洁领域,特别涉及一个可擦外墙玻璃的机器人。
背景技术:
2.外墙清洗分为吊板方式和擦窗方式。吊板方式是用吊绳、吊板将人吊到工作位置进行清洗。这种型式比较简单,成本也低,只要工人身体素质好、绳子连接牢固就可以进行。
3.由于现有技术中的外墙玻璃常规清洗方式主要还是人工清洗,在目前市场上基于无人机的外墙清洗机器人尤其较少,机器人擦除相较于人工更加安全,特别是具有针对性的清洁机器人,即能够关注定位于某块玻璃或某一层玻璃,同时还需要具有噪音小和清洁干净等效果,均是如今外墙擦除的社会趋势。
技术实现要素:
4.本发明要解决的技术问题是克服现有技术的缺陷,提供一个可擦外墙玻璃的机器人。
5.为了解决上述技术问题,本发明提供了如下的技术方案:
6.本发明一个可擦外墙玻璃的机器人,包括无人机主体,所述无人机主体的顶端安装有顶平板,所述顶平板的表面安装有顶旋翼,顶旋翼的内侧安装有固定杆,固定杆的内侧安装有连接座,其连接座的顶端安装有信号模块,所述顶平板的底端安装有主控箱,所述主控箱的两侧表面设置有通风口,主控箱的一侧表面设置有推动面,其推动面的表面两侧均分别安装有第一侧旋翼和第二侧旋翼,第一侧旋翼和第二侧旋翼的内侧安装有连接杆,所述主控箱的另一侧表面设置有洗涤面,所述洗涤面的表面上侧安装有玻璃刮,玻璃刮的底侧安装有毛刷和雾化喷头,所述主控箱内部包含由可拆卸电池。
7.作为本发明的一种优选技术方案,所述主控箱的内部包含有微控芯片、气压计和驱动电机,所述连接座靠洗涤面一侧表面设置有摄像头,所述驱动电机和毛刷为传动连接,微控芯片分别与摄像头、驱动电机、信号模块和气压计为电性连接。
8.作为本发明的一种优选技术方案,所述信号模块包含有wifi连接模块、红外感应模块和蓝牙连接模块,所述信号模块和连接座为固定连接。
9.作为本发明的一种优选技术方案,所述雾化喷头安装于毛刷的上侧,所述雾化喷头包含有泵机和储液盒,所述毛刷的两端安装有伸出杆,伸出杆的一端安装有轴心,轴心的内侧安装有椭圆棍,其椭圆辊的表面设置有条状清洁布,所述轴心和驱动电机为传动连接。
10.作为本发明的一种优选技术方案,所述玻璃刮的伸出宽度超过椭圆辊短轴一半的2mm以上,椭圆辊的长轴一半超过玻璃刮伸出宽度的1mm以内。
11.作为本发明的一种优选技术方案,所述毛刷的中部设置有雾化喷头,其雾化喷头的表面设置有轴心,且轴心呈圆筒状设置,所述轴心表面设置有条状布条。
12.作为本发明的一种优选技术方案,所述毛刷呈圆台状结构设置,其中轴心的伸出长度小于玻璃刮的伸出宽度。
13.作为本发明的一种优选技术方案,所述第一侧旋翼和第二侧旋翼相互为逆向转动设置,其内部还设置有喇叭状遮挡,所述连接杆与推动面为镶嵌设置,其连接杆内部设置有弹性连接件。
14.与现有技术相比,本发明的有益效果如下:
15.1:本发明通过设置有推动面和洗涤面,基于推动面即可将洗涤面推向玻璃表面,洗涤面通过表面的玻璃刮和毛刷对玻璃构成清洁作用,实现对外墙玻璃表面的直接清洁效果。
16.2:本发明可基于摄像头、气压计和信号模块针对于目标大楼外墙玻璃构成定位效果,能够针对于高度定位到某一层,或针对于信号模块的控制定位到某一块玻璃,并由摄像头拍摄记录,以便于下次清洁时的再次调用对比。
17.3:本发明相较于常规的人工清洗玻璃,更加安全,且整体结构均采用较轻的材质构成,仅常规使用时推动面运转,在未使用时也能够作为常规无人机针对大楼玻璃实现检测玻璃是否碎裂等实用效果。
附图说明
18.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
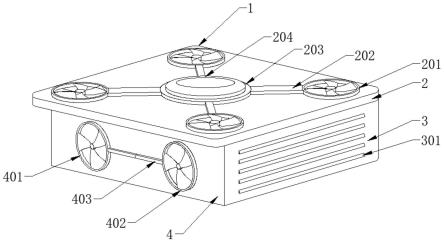
19.图1是实施例1的整体结构示意图;
20.图2是实施例1的洗涤面结构示意图;
21.图3是实施例1的毛刷结构示意图;
22.图4是实施例1的模块结构示意图;
23.图5是实施例2的洗涤面结构示意图;
24.图中:1、无人机主体;2、顶平板;201、顶旋翼;202、固定杆;203、连接座;204、信号模块;3、主控箱;301、通风口;4、推动面;401、第一侧旋翼;402、第二侧旋翼;403、连接杆;5、洗涤面;501、玻璃刮;502、毛刷;503、雾化喷头;6、摄像头;7、伸出杆。
具体实施方式
25.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
26.实施例1
27.如图1-4所示,本发明提供一个可擦外墙玻璃的机器人,包括无人机主体1,所述无人机主体1的顶端安装有顶平板2,所述顶平板2的表面安装有顶旋翼201,顶旋翼201的内侧安装有固定杆202,固定杆202的内侧安装有连接座203,其连接座203的顶端安装有信号模块204,所述顶平板2的底端安装有主控箱3,所述主控箱3的两侧表面设置有通风口301,主控箱3的一侧表面设置有推动面4,其推动面4的表面两侧均分别安装有第一侧旋翼401 和第二侧旋翼402,第一侧旋翼401和第二侧旋翼402的内侧安装有连接杆 403,所述主控箱3的另一侧表面设置有洗涤面5,所述洗涤面5的表面上侧安装有玻璃刮501,玻璃刮501的底侧安装有毛刷502和雾化喷头503,所述主控箱3内部包含由可拆卸电池。
28.进一步的,主控箱3的内部包含有微控芯片、气压计和驱动电机,所述连接座203靠
洗涤面5一侧表面设置有摄像头6,所述驱动电机和毛刷502为传动连接,微控芯片分别与摄像头6、驱动电机、信号模块204和气压计为电性连接。
29.信号模块204包含有wifi连接模块、红外感应模块和蓝牙连接模块,所述信号模块204和连接座203为固定连接。
30.雾化喷头503安装于毛刷502的上侧,所述雾化喷头503包含有泵机和储液盒,所述毛刷502的两端安装有伸出杆7,伸出杆7的一端安装有轴心,轴心的内侧安装有椭圆棍,其椭圆辊的表面设置有条状清洁布,所述轴心和驱动电机为传动连接。
31.玻璃刮501的伸出宽度超过椭圆辊短轴一半的2mm以上,椭圆辊的长轴一半超过玻璃刮501伸出宽度的1mm以内。
32.第一侧旋翼401和第二侧旋翼402相互为逆向转动设置,其内部还设置有喇叭状遮挡,所述连接杆403与推动面4为镶嵌设置,其连接杆403内部设置有弹性连接。
33.具体的,整体结构主要基于无人机主体1,于无人机主体1的顶旋翼201 底端安装有对应的顶平板2,使顶平板2和底部的主控箱3形成上下对应面积的结构,以保持主控箱3一侧的洗涤面5能够宽于顶旋翼201的伸出宽度,主控箱3的底部为半开放式结构;
34.顶旋翼201的内侧则分贝设置有对应的固定杆202和连接座203,连接座203位于洗涤面5一侧安装有提供拍摄的摄像头6,摄像头6在根据主控箱3 的控制拍摄后能够基于图像对比识别记录擦拭窗户的地点,以便于下次擦拭的定位;
35.同时结合定位效果的还有信号模块204下的蓝牙连接模块以及红外感应模块,其中蓝牙连接模块则主要根据大楼内所设置的蓝牙连接点,即大楼内所设置的楼层信号节点,形成三点定位方便自动定位;而未设置楼层定位的大楼则可根据人工在市内设置红外信号从玻璃处射出,由红外感应模块详细定位后即可完成拍摄作业并且记录,与此同时主控箱3内的气压计也能够进一步提供针对于高度的数值监测,便于记录所对应的楼层高度,达到二次清洗时的定位效果。
36.在清洗流程中主要未推动面4和洗涤面5所配合使用,推动面4主要设置有第一侧旋翼401和第二侧旋翼402,以相反的转向构成对于洗涤面5的侧向推动,毛刷502为成对的转动相反结构构成,在清洗的流程中为长时间推动清洗作业;位于中部的连接杆403主要为连接第一侧旋翼401和第二侧旋翼402,使其能够相互达到弹性降震效果,结合位于内部的喇叭状遮挡形成朝向远离玻璃处的噪音传递,降低无人机对正在清洗玻璃处的噪音;
37.在洗涤面5则主要设置有玻璃刮501和毛刷502,玻璃刮501为常规使用方式,于玻璃表面上下滑动即能够构成对于毛刷502清洁后的擦拭;毛刷502 则首先经由雾化喷头503在玻璃上喷雾后,根据驱动电机的驱动使伸出杆7 处的轴心旋转带动毛刷502的椭圆辊旋转,椭圆辊由于长轴部分长于玻璃刮 501的伸出宽度,短轴部分短于玻璃刮501的伸出宽度,因此长轴处实现挤压效果,短轴为清扫效果,同时在处于短轴垂直于玻璃时,玻璃刮501又能够进一步贴近玻璃构成擦拭现象,在上下部分配合循环后即可完成对整块玻璃的清洁作用。
38.实施例2
39.毛刷502的中部设置有雾化喷头503,其雾化喷头503的表面设置有轴心,且轴心呈圆筒状设置,所述轴心表面设置有条状布条。
40.毛刷502呈圆台状结构设置,其中轴心的伸出长度小于玻璃刮501的伸出宽度。
41.与实施例1区别之处在于,雾化喷头503设置于毛刷502的中侧,毛刷 502则呈圆筒锥形结构设置,在条状布条展开后其长度较玻璃刮501的伸出宽度更长,因此能够实现在清洗区域下的边喷洒毛刷502边转动的清洗效果,并根据玻璃刮501构成对玻璃的擦拭现象,以达到进一步提高清洗效率的技术效果。
42.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
