1.本实用新型涉及一种清洗设备,特别涉及一种在医疗领域中患者躺卧就可自动进行手臂清洗、烘干的手臂清洗机,属于医疗设备领域。
背景技术:
2.经外周静脉置入中心静脉导管(peripherally inserted centralcatheter,picc)是一种从外周静脉导入,末端位于中心静脉的深静脉置管技术。其具有操作过程简单、穿刺成功率高、损伤小、留置时间长、病人活动不受限制以及能避免反复静脉穿刺、保护血管、 减轻患者痛苦等优点,目前已在临床广泛应用。
3.picc 置管时应严格无菌操作,在进行患者手臂消毒时,选用消毒棉棒或棉球蘸取碘消毒剂以进针点为圆心进行环形消毒,消毒范围为距圆心20cm以上,顺时针或逆时针方向交叉消毒三遍,以确保整个手臂消毒全面,彻底清除皮肤表面及残留于毛发根部的细菌,待消毒液完全干燥后再行穿刺。
4.临床上,很多picc留置者为长期住院患者,由于疾病和身体虚弱等原因不能经常洗澡,导致皮肤角质层和污垢较重,在picc置管前需要反复进行手臂消毒,增加了消毒次数和频率,延长了置管时间,而消毒液反复清理过程,会刺激患者皮肤收缩,增加恐惧感和皮肤的不舒适感,影响患者情绪,甚至由于多次消毒,造成患者皮肤损伤。
5.如何改善临床中患者手臂的清洁问题,避免反复多次消毒过程,提升治疗体验,就成为本实用新型所要解决的问题。
技术实现要素:
6.鉴于上述现有技术的不足,本实用新型旨在提供一种临床安装方便、操作简单,可快速实现躺卧患者手臂清洗、烘干以及装置消杀的手臂清洗机,以方便治疗过程,提高患者治疗过程的舒适性,放松治疗心情,提升治疗体验。
7.本实用新型是通过以下技术方案来实现的:
8.本实用新型所述的手臂清洗机,包括控制器、漏斗型外壳体、筒状内壳体和顶盖,以及分别与控制器信号连通的冲洗机构、烘干机构和一根以上的紫外线消毒灯。控制器设置在外壳体的表面,外壳体表面还设有进水口和竖直方向的刻度尺。内壳体为透明状,内壳体固定在外壳体内,内、外壳体的中心轴线重合,内壳体上设有上、下贯通的通槽,与通槽相对的、内壳体的另一侧内壁上设有导向槽。通槽内侧开口上覆盖有挡块,挡块上设有与通槽连通的、水平方向的
‘
之’字型通道。顶盖密封在外壳体和内壳体的顶部,顶盖中心设有带有松紧套的通孔,内、外壳体及顶盖之间形成密封的独立空腔。冲洗机构和烘干机构分布在内壳体内以及独立空腔中,冲洗机构与进水口连通,冲洗机构和烘干机构沿着
‘
之’字型通道、通槽以及导向槽在内壳体内做上、下方向的运动。紫外线消毒灯分布在独立空腔中的外壳体内壁上。
9.所述冲洗机构包括电加热器、加皂盒、水泵、冲洗环、冲洗环位置传感器和冲洗环
传动机构。独立空腔的顶部设有隔板,电加热器、加皂盒和水泵分别固定在隔板上,电加热器与进水口连通,加皂盒和水泵顺序连接在电加热器上,水泵通过软管与冲洗环连通。冲洗环位于内壳体内,冲洗环和内壳体中心轴线重合,冲洗环上设有冲洗环导向块与导向槽相配合,冲洗环内侧分布有冲洗喷头。冲洗环位置传感器设置在冲洗环表面,冲洗环传动机构位于内壳体的外侧,冲洗环通过
‘
之’字型通道和通槽与冲洗环传动机构连接传动。
10.所述冲洗机构还包括一个与控制器信号连通的冲洗环自动收管机,冲洗环自动收管机固定在隔板上,水泵与冲洗环之间的软管通过冲洗环自动收管机进行管路的自动收放。
11.所述冲洗环传动机构包括冲洗环传动电机和冲洗环传动齿条,冲洗环传动齿条固定在内壳体的外壁上,冲洗环传动电机通过
‘
之’字型通道和通槽与冲洗环固定连接,冲洗环传动电机通过齿轮与冲洗环传动齿条相啮合。
12.所述冲洗环内侧还分布有刷毛,刷毛长度大于冲洗喷头的裸露长度。
13.所述烘干机构包括气泵、烘干环、烘干环位置传感器和烘干环传动电机。气泵固定在独立空腔中外壳体的底板上,气泵通过软管与烘干环连通。烘干环位于内壳体内,烘干环和内壳体中心轴线重合,烘干环上设有烘干环导向块与导向槽相配合,烘干环内侧分布有烘干喷头。烘干环位置传感器固定在烘干环表面。烘干环传动电机位于内壳体的外侧,烘干环传动电机通过
‘
之’字型通道和通槽与烘干环固定连接,烘干环传动电机通过齿轮与冲洗环传动齿条相啮合。
14.所述烘干机构还包括一个与控制器信号连通的烘干环自动收管机,烘干环自动收管机固定在独立空腔中外壳体的底板上,气泵与烘干环之间的软管通过烘干环自动收管机进行管路的自动收放。
15.所述
‘
之’字型通道的入口上还设有隔水毛。
16.所述内壳体为玻璃内壳体。
17.本实用新型所述的手臂清洗机的有益效果包括:
18.1、利用密闭空间对患者手臂进行自动控制下的清洗和烘干以及清洗后利用紫外线消毒灯对装置内部进行消杀,降低了医护人员的工作强度,简化了护理过程,避免了交叉感染,同时,方便了卧床患者,保证了治疗过程;
19.2、利用可上、下运动的冲洗环和烘干环对患者手臂进行全方位自动清洗、烘干,满足了患者临床清洗需要,简化了清洗过程,实现了患者在各种状态下的清洗使用需要,同时,控制器对冲洗过程进行控制,操作简单、使用安全,清洗质量稳定、可靠;
20.3、设置的紫外线消毒灯方便了手臂清洗机自身的临床消毒需要,避免了以往需要单独进行紫外线照射消毒带来的不便,安全性和灵活性明显提高;
21.4、所有带电设备均设置在密闭的独立空腔中,安全性好,维护简单;
22.5、利用
‘
之’字型通道、隔水毛和挡块对通槽内侧开口进行密封,保证了独立空腔的密闭性,也满足了冲洗环和烘干环的传动需要,结构简单、制作方便;
23.6、冲洗环内侧设置的刷毛提高了冲洗过程的摩擦效果,舒适性好,清洗质量明显提高;
24.7、整个手臂清洗机呈简单的圆柱状,临床使用简单、方便、安全,可在多种临床环境下快速使用。
附图说明
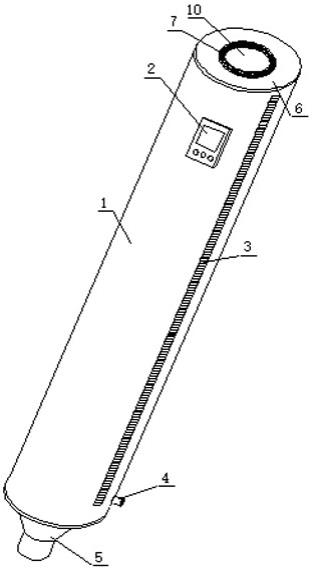
25.图1为本实用新型的立体结构示意图;
26.图2为本实用新型的正向结构示意图;
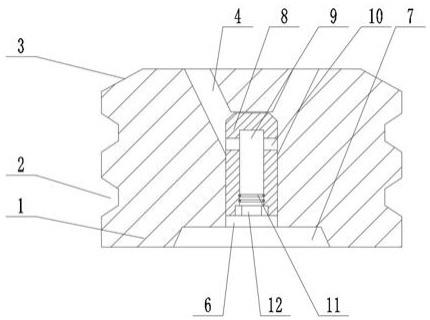
27.图3为图2的a-a向剖视图;
28.图4为图2的d-d向剖视图;
29.图5为图2的e-e向剖视图;
30.图6为图3的b-b向剖视图;
31.图7为图3的c-c向剖视图。
具体实施方式
32.下面结合附图1-图7对本实用新型做进一步的描述:
33.本实用新型所述的手臂清洗机,包括控制器2、漏斗型外壳体1、筒状内壳体8和顶盖6,以及分别与控制器2信号连通的冲洗机构、烘干机构和八根紫外线消毒灯9。
34.控制器2设置在外壳体1的表面,同时,在外壳体1表面还设有进水口4和竖直方向的刻度尺3。进水口4用于将外界水源引入到手臂清洗机中,刻度尺3用于标示冲洗机构和烘干机构的位置,以方便控制冲洗机构及烘干机构工作时具体的起始位置和终止位置,保证冲洗和烘干过程运行位置准确。
35.为方便患者整条手臂的清洗使用,本例中,漏斗型外壳体1的长度以能满足正常情况下患者整体手臂的同时清洗为标准,外壳体1下方的漏斗口5用于流出清洗后的污水。当然,漏斗口5上也可直接连接外界导管,方便污水直接导出。内壳体8采用透明玻璃制成,内壳体8固定在外壳体1内,内、外壳体8,1的中心轴线重合并且顶部和底部相互平齐。顶盖6密封在内、外壳体8,1平齐的顶面上,顶盖6中心设有带有松紧套7的通孔10,内、外壳体8,1及顶盖6之间形成密封的独立空腔。为实现冲洗机构和烘干机构在内壳体8内的上、下往复运动,本例中,在内壳体8上还设有上、下贯通的通槽,与通槽相对的、内壳体8的另一侧内壁上设有导向槽23。为避免清洗过程中通槽漏水,在通槽内侧开口上整体覆盖有一个挡块17,挡块17固定在内壳体8的内侧面上,挡块17上设有与通槽连通的、水平方向的
‘
之’字型通道,同时,在
‘
之’字型通道的入口上设有隔水毛28,隔水毛28可有效阻挡水流喷入到
‘
之’字型通道中。
36.为保证清洗质量,本例中,冲洗机构由电加热器24、加皂盒25、水泵26、冲洗环21、冲洗环自动收管机12、冲洗环位置传感器18和冲洗环传动机构组成。为进一步方便安装和维护,在独立空腔的顶部设有隔板11,电加热器24、加皂盒25、水泵26和冲洗环自动收管机12分别固定在隔板11上,冲洗环自动收管机12可以始终保持从上向下对管路进行收放,确保了管路使用的安全性。当然,在独立空腔中也可不设置隔板11,而将电加热器24、加皂盒25、水泵26和冲洗环自动收管机12分别固定在独立空腔的适当位置上,只要冲洗环自动收管机12能安全收放管路即可。电加热器24与进水口4连通,加皂盒25和水泵26顺序连接在电加热器24上,加皂盒25在控制器2的控制下可随时对管路中加热后的水中进行加皂液处理,以提高清洗水的清洗效果。水泵26通过软管32与冲洗环21连通,水泵26与冲洗环21之间的软管32同时缠绕在冲洗环自动收管机12上,通过冲洗环自动收管机12可对软管32进行可控状态下的自动收放,完成软管32与冲洗环21的随动过程。冲洗环21为一个如救生圈状的内
空环形物,冲洗环21外侧表面设有冲洗环导向块27,冲洗环21内侧分布有向中心喷淋的冲洗喷头33,在冲洗环21内侧的冲洗喷头33之间还分布有刷毛34,刷毛34长度大于冲洗喷头33裸露的长度,刷毛34具有一定的强度,可方便对患者手臂进行摩擦,以提高清洗效果。冲洗环传动机构包括冲洗环传动电机13和冲洗环传动齿条14。冲洗环传动电机13位于内壳体8的外侧,冲洗环传动齿条14固定在内壳体8的外壁上。本例中,为简化结构,冲洗环传动电机13通过一个托板与金属水管31固定连接,金属水管31穿过通槽和
‘
之’字型通道后与冲洗环21相连接。冲洗环21位于内壳体8内,冲洗环21和内壳体8中心轴线重合,冲洗环导向块27与导向槽23相配合。冲洗环自动收管机12上的软管32与金属水管31的外端连接,金属水管31既作为支撑传动构件连接在冲洗环21与冲洗环传动电机13之间,又作为管路将冲洗环21与软管32连通。冲洗环传动电机13通过齿轮与冲洗环传动齿条14相啮合,随着冲洗环传动电机13的运转,冲洗环传动电机13和金属水管31一起与冲洗环21在内壳体8上做上、下方向的运动,进而完成冲洗环21对患者手臂的上、下冲洗。为准确控制冲洗环21的运行轨迹,本例中,在冲洗环21表面还设置了冲洗环位置传感器18,利用冲洗环位置传感器18感应并明确冲洗环21的位置,方便控制器2结合刻度尺3对冲洗环21进行准确的起始位置设置和运行位置控制。
37.为满足临床清洗手臂需要,完善清洗过程。本例中,烘干机构由气泵35、烘干环22、烘干环自动收管机16、烘干环位置传感器19和烘干环传动电机15组成。其中,气泵35和烘干环自动收管机16分别固定在独立空腔中外壳体1的底板上,烘干环22位于内壳体8内,烘干环22和内壳体8中心轴线重合,烘干环22上设有烘干环导向块37与导向槽23相配合,烘干环22内侧分布有多个烘干喷头36。为简化结构,如冲洗机构一样,利用金属管路穿过通槽和
‘
之’字型通道连接在烘干环22与烘干环传动电机15之间,气泵35通过软管与金属管路连通,气泵35与金属管路之间的软管同时缠绕在烘干环自动收管机16上,烘干环自动收管机16对软管收放进行自动控制。烘干环位置传感器19固定在烘干环22表面,烘干环传动电机15位于内壳体8外侧,烘干环传动电机15通过齿轮与冲洗环传动齿条14相啮合,利用一个冲洗环传动齿条14实现冲洗环21和烘干环22的上、下运动。
38.八个紫外线消毒灯9分布在独立空腔中外壳体1的内壁上,独立空腔中不会受到内壳体8内水流的影响,通过控制器2的控制,紫外线消毒灯9的紫外线光可顺利穿过玻璃内壳体8对手臂清洗机内部进行紫外线消杀,保证了手臂清洗机使用的安全性,满足了临床多次、重复使用的需要。
39.当然,上述冲洗环自动收管机12和烘干环自动收管机16只为能自动收、放管路使用,在有较大独立空腔以及不影响安全使用的前提下,本结构中也可不设置冲洗环自动收管机12和烘干环自动收管机16,管路只需有序放置在独立空腔中即可。又当然,用于固定连接和作为传送通道的金属管路也可只为支撑杆,而软管则依附在支撑杆上直接与冲洗环21或者烘干环22连通,其结构同样也能满足清洗过程的使用需要,在此不再赘述。
40.临床清洗使用时,首先,将手臂清洗机的进水口4与外界自来水管连通,漏斗口5与外界污水管路连通;然后,将患者手臂从顶盖6上通孔10伸入到内壳体8中,松紧套7将患者手臂与通孔10之间的缝隙密封,同时,患者手臂需穿过位于顶部的冲洗环21和靠近底部的烘干环22;接着,依据刻度尺3判断手臂穿入的深度和所需清洗的范围,通过控制器2设定冲洗环21及烘干环22起始工作位置和终止工作位置,设置冲洗次数,设置完成后启动手臂清
洗机;再接着,电加热器24开始对流入的自来水进行加热,控制器2控制加皂盒25对加热后管路中的温水进行皂液加注,经水泵26将加注皂液后的温水加压后送人到冲洗环21中,并经冲洗喷头33喷出。期间,控制器2控制冲洗环传动电机13启动,在齿轮与固定在内壳体8外壁上冲洗环传动齿条14的啮合传动下,推动冲洗环传动电机13以及通过金属水管31带动冲洗环21在内壳体8内进行上、下方向运动,冲洗环自动收管机12会在控制器2的控制下,随时根据运动过程送出或回收连接在水泵26与金属水管31间的软管32,保证了软管管路连接的随动性以及通畅性,确保了冲洗过程顺利进行。当然,冲洗过程中冲洗环位置传感器18会随时检测冲洗环21的位置信息,并避免与下方烘干环22产生碰撞。当冲洗环21完成设置的有皂液冲洗次数后,控制器2会控制冲洗环21再完成一次无皂液清洗,然后冲洗环21复位,气泵35启动,压缩空气通过烘干环22上的烘干喷头36喷出,烘干环22开始烘干工作,同时,烘干环传动电机15驱动烘干环22做上、下方向的运动,烘干环位置传感器19随时检测烘干环22的位置信息,直至烘干过程完成,烘干环22复位,整个手臂清洗完成,退出手臂即可。
41.上述清洗过程中,污水不断地从漏斗口5流出,干净的新水不断由进水口4流入,整个过程在密闭环境下自动完成,不会对患者产生任何影响,方便了患者在卧床状态下手臂的快速清洁。
42.上述清洗过程完成后,通过控制器2控制八个紫外线消毒灯9开启,利用紫外线对手臂清洗机内部进行及时消杀,以方便、快速地为下一次使用做好准备。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。