技术特征:
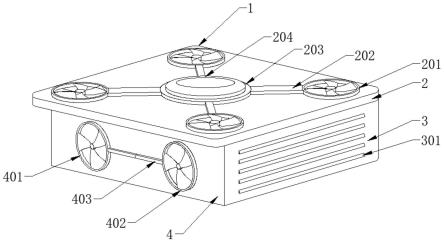
1.一个可擦外墙玻璃的机器人,包括无人机主体(1),其特征在于,所述无人机主体(1)的顶端安装有顶平板(2),所述顶平板(2)的表面安装有顶旋翼(201),顶旋翼(201)的内侧安装有固定杆(202),固定杆(202)的内侧安装有连接座(203),其连接座(203)的顶端安装有信号模块(204),所述顶平板(2)的底端安装有主控箱(3),所述主控箱(3)的两侧表面设置有通风口(301),主控箱(3)的一侧表面设置有推动面(4),其推动面(4)的表面两侧均分别安装有第一侧旋翼(401)和第二侧旋翼(402),第一侧旋翼(401)和第二侧旋翼(402)的内侧安装有连接杆(403),所述主控箱(3)的另一侧表面设置有洗涤面(5),所述洗涤面(5)的表面上侧安装有玻璃刮(501),玻璃刮(501)的底侧安装有毛刷(502)和雾化喷头(503),所述主控箱(3)内部包含由可拆卸电池。2.根据权利要求1所述的一个可擦外墙玻璃的机器人,其特征在于,所述主控箱(3)的内部包含有微控芯片、气压计和驱动电机,所述连接座(203)靠洗涤面(5)一侧表面设置有摄像头(6),所述驱动电机和毛刷(502)为传动连接,微控芯片分别与摄像头(6)、驱动电机、信号模块(204)和气压计为电性连接。3.根据权利要求2所述的一个可擦外墙玻璃的机器人,其特征在于,所述信号模块(204)包含有wifi连接模块、红外感应模块和蓝牙连接模块,所述信号模块(204)和连接座(203)为固定连接。4.根据权利要求2所述的一个可擦外墙玻璃的机器人,其特征在于,所述雾化喷头(503)安装于毛刷(502)的上侧,所述雾化喷头(503)包含有泵机和储液盒,所述毛刷(502)的两端安装有伸出杆(7),伸出杆(7)的一端安装有轴心,轴心的内侧安装有椭圆棍,其椭圆辊的表面设置有条状清洁布,所述轴心和驱动电机为传动连接。5.根据权利要求4所述的一个可擦外墙玻璃的机器人,其特征在于,所述玻璃刮(501)的伸出宽度超过椭圆辊短轴一半的2mm以上,椭圆辊的长轴一半超过玻璃刮(501)伸出宽度的1mm以内。6.根据权利要求2所述的一个可擦外墙玻璃的机器人,其特征在于,所述毛刷(502)的中部设置有雾化喷头(503),其雾化喷头(503)的表面设置有轴心,且轴心呈圆筒状设置,所述轴心表面设置有条状布条。7.根据权利要求6所述的一个可擦外墙玻璃的机器人,其特征在于,所述毛刷(502)呈圆台状结构设置,其中轴心的伸出长度小于玻璃刮(501)的伸出宽度。8.根据权利要求1所述的一个可擦外墙玻璃的机器人,其特征在于,所述第一侧旋翼(401)和第二侧旋翼(402)相互为逆向转动设置,其内部还设置有喇叭状遮挡,所述连接杆(403)与推动面(4)为镶嵌设置,其连接杆(403)内部设置有弹性连接件。
技术总结
本发明公开了一种可擦外墙玻璃的机器人,包括无人机主体,无人机主体的顶端安装有顶平板,顶平板的表面安装有顶旋翼,顶旋翼的内侧安装有固定杆,固定杆的内侧安装有连接座,其连接座的顶端安装有信号模块,顶平板的底端安装有主控箱,主控箱的两侧表面设置有通风口,主控箱的一侧表面设置有推动面,第一侧旋翼和第二侧旋翼的内侧安装有连接杆,主控箱的另一侧表面设置有洗涤面,洗涤面的表面上侧安装有玻璃刮,玻璃刮的底侧安装有毛刷和雾化喷头。本发明通过设置有推动面和洗涤面,基于推动面即可将洗涤面推向玻璃表面,洗涤面通过表面的玻璃刮和毛刷对玻璃构成清洁作用,实现对外墙玻璃表面的直接清洁效果。玻璃表面的直接清洁效果。玻璃表面的直接清洁效果。
技术研发人员:张凯旋
受保护的技术使用者:张凯旋
技术研发日:2022.01.20
技术公布日:2022/7/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。