1.本发明涉及软体机器人的技术领域,尤其涉及一种多自由度弯曲缠绕软体执行器。
背景技术:
2.随着社会经济高速发展,软体机器人越来越广泛地运用于医疗、救援、工业生产中,软体机器人相比于传统的刚体机器人,具有自由度高、柔顺性高、适应性高、不需要大量刚性连接即可实现复杂运动等优点。软体机器人主要由很软的材料组成,基于软材料变形,软体机器人在抓取不规则物体、适应性作业方面具有很高的应用价值,同时其也有一定的缺点,例如动作时间长,动作单一,响应缓慢等。为了解决这些问题,软体机器人的发展越来越得到重视。近年来,大量研究人员投到软体执行器的研究中。随着新材料的出现,软体机器人也可以由更多性能良好的材料制成,例如形状记忆合金、电活性聚合物、介电高弹性体、水凝胶以及硅胶材料等。软体执行器的设计涉及机械、材料、人工智能、生物学等多个学科门类,这些学科的发展能让机器人更好地服务于人类和融入人类生活,同时软体机器人和软体执行器向着高柔软化、多功能化、高亲和度不断发展,具有很好的未来前景。
3.软体执行器是软体机器人最主要也是最重要的部分,是实现特定软体机器人运动的基础。软体执行器对比于刚体执行器,具有制造工艺简单、成本低、适应性强等优点。软体执行器为人机交互和复杂环境下刚体执行器很难实现的灵活性提供了新的解决思路。软体执行器具有广泛应用,例如工业生产中的物件装卸,医疗和救援机器人,农业生产中的果蔬无损采摘等等,因此,软体执行器具有很大的发展空间。
4.目前,应用最多的是气动软体执行器,气动驱动的软体执行器的驱动介质为空气,污染少,重量轻,适应性更高。广泛应用于各个领域,气动软体执行器可分为纤维约束型结构和气动网格结构,纤维约束型结构一般通过纤维限制弹性体产生膨胀变形,从而产生特定运动,纤维约束型结构尽管能够通过并联形成类似象鼻式结构实现边转向边弯曲的动作,但仍存在着运动方式过于简单,制作难度高的缺点。一般的气动网格结构由多个气动腔室组成,通过腔室膨胀驱动执行器产生动作,但缺点是只能产生单独的一种动作。因此,设计出具有高自由度,高适应性并且制作方式简单的软体气动驱动器具有很大的应用价值。
技术实现要素:
5.针对上述产生的气动驱动的软体执行器运动方式过于简单,制作难度高,动作单一的问题,本发明的目的在于提供一种多自由度弯曲缠绕软体执行器。
6.为了实现上述目的,本发明采取的技术方案为:
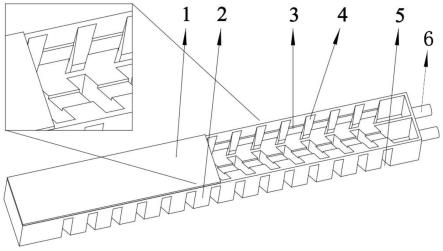
7.一种多自由度弯曲缠绕软体执行器,其中,包括:变形层2和限制层1,变形层2的一侧面上设有并排设置的两个气路槽,限制层1的一侧面和所述变形层2的一侧面连接,通过所述限制层1对两个所述气路槽分别密封,变形层2上设有分别与两个所述气路槽连通的两个气体导管6,通过所述气体导管6对与其连接的所述气路槽通入气体使所述变形层2变形;
8.上述的多自由度弯曲缠绕软体执行器,其中,每一个所述气路槽包括:沿所述变形层2设置的多个气体腔室4和连通多个所述气体腔室4的气体通路3,通过所述气体通路3将由所述气体导管6进入的气体均匀运输至多个所述气体腔室4内。
9.上述的多自由度弯曲缠绕软体执行器,其中,位于变形层2的另一侧面上设有多个气体腔室外壁沟壑5,任意相邻的两个所述气体腔室4之间设有一个所述气体腔室外壁沟壑5。
10.上述的多自由度弯曲缠绕软体执行器,其中,所述气体腔室4和气体腔室外壁沟壑5分别位于变形层2相背离的两个侧面上。
11.上述的多自由度弯曲缠绕软体执行器,其中,两个所述气体导管6均位于变形层2的端部。
12.上述的多自由度弯曲缠绕软体执行器,其中,所述限制层1包括:硅胶层和棉质纱网,所述硅胶层上粘贴有所述棉质纱网,所述硅胶层与所述变形层2连接,所述棉质纱网用于限制所述硅胶层延伸。
13.上述的多自由度弯曲缠绕软体执行器,其中,所述硅胶层和所述变形层2均选用硅胶材质。
14.上述的多自由度弯曲缠绕软体执行器,其中,位于所述变形层2上的每一个气体腔室4的壁厚均大于气体通路3的壁厚。
15.上述的多自由度弯曲缠绕软体执行器,其中,每一个所述气路槽的多个气体腔室4相互平行设置。
16.上述的多自由度弯曲缠绕软体执行器,其中,位于所述气路槽上的多个气体腔室4均倾斜设置。
17.本发明由于采用了上述技术,使之与现有技术相比具有的积极效果是:
18.(1)本发明中,硅胶层上粘贴有棉质纱网,通过硅胶层和变形层连接可以实现柔性的密封连接,同时材料相同,柔韧性相同,避免出现密封性下降或者变形程度不一致的情况,同时在硅胶层内粘贴有棉质纱网,由于棉质纱网不具有延展性,同时具有较高的柔性,可以在保证变形层的柔韧性不发生变形的情况下,限制硅胶层的延展性,使软体执行器通过变形层变形并通过限制层对物件进行抓取;
19.(2)本发明中,变形层的端部设有两个气体导管,通过调节气体导管处的气压大小,可以调节变形层的变形方向及变形角度,位于变形层上的两个气路槽对称设置,当两个气体导管的气压相同时,即同时通入等量的气体,变形层仅进行环形的变形抓取,不会向两侧发生螺旋形的偏转,位于变形层上的多个气体腔室均倾斜设置,当一个气体导管的气压为零,即不通入气体,另一个气体导管的气压不为零,即通入气体,变形层会向不通入气体的一侧发生螺旋形的变形抓取,当一个气体导管通入少量气体,另一个气体导管通入大量气体,变形层会向通入少量气体的一侧发生螺旋形的变形抓取,但是其变形量小于气体导管不通入气体的变形量,即两个气体导管均通入气体后,可以增强气动软体执行器通过限制层抓取物体的抓取力,增强抓握程度,同时通过通入少量气体的气体导管可以有效抑制气动软体执行器呈螺旋状的变形程度;
20.(3)本发明具有多自由度及高灵活性,通过气体导管处的气压大小,可以改变在单个软体执行器上能够分别实现弯曲和不同幅度的缠绕功能。
附图说明
21.图1是本发明的一种多自由度弯曲缠绕软体执行器的结构示意图。
22.图2是本发明的一种多自由度弯曲缠绕软体执行器的限制层的结构示意图。
23.图3是本发明的一种多自由度弯曲缠绕软体执行器的变形层的结构示意图。
24.图4是本发明的一种多自由度弯曲缠绕软体执行器的两个气体导管气压大小相同的实施例图。
25.图5是本发明的一种多自由度弯曲缠绕软体执行器的位于下侧的气体导管的气压为零且位于上侧的气体导管的气压不为零的实施例图。
26.图6是本发明的一种多自由度弯曲缠绕软体执行器的位于下侧的气体导管的气压较小且位于上侧的气体导管的气压较大的实施例图。
27.附图中:1、限制层;2、变形层;3、气体通路;4、气体腔室;5、气体腔室外壁沟壑;6、气体导管。
具体实施方式
28.下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
29.请参照图1至图6所示,示出了一种多自由度弯曲缠绕软体执行器,其中,包括:变形层2和限制层1,变形层2的一侧面上设有并排设置的两个气路槽,限制层1的一侧面和变形层2的一侧面连接,通过限制层1对两个气路槽分别密封,变形层2上设有分别与两个气路槽连通的两个气体导管6,通过气体导管6对与其连接的气路槽通入气体使变形层2变形;
30.进一步,在一种较佳实施例中,每一个气路槽包括:沿变形层2设置的多个气体腔室4和连通多个气体腔室4的气体通路3,通过气体通路3将由气体导管6进入的气体均匀运输至多个气体腔室4内。
31.进一步,在一种较佳实施例中,位于变形层2的另一侧面上设有多个气体腔室外壁沟壑5,任意相邻的两个气体腔室4之间设有一个气体腔室外壁沟壑5。
32.进一步,在一种较佳实施例中,气体腔室4和气体腔室外壁沟壑5分别位于变形层2相背离的两个侧面上。
33.进一步,在一种较佳实施例中,两个气体导管6均位于变形层2的端部。
34.进一步,在一种较佳实施例中,限制层1包括:硅胶层和棉质纱网,硅胶层上粘贴有棉质纱网,硅胶层与变形层2连接,棉质纱网用于限制硅胶层延伸。
35.进一步,在一种较佳实施例中,硅胶层和变形层2均选用硅胶材质。
36.进一步,在一种较佳实施例中,位于变形层2上的每一个气体腔室4的壁厚均大于气体通路3的壁厚。
37.进一步,在一种较佳实施例中,每一个气路槽的多个气体腔室4相互平行设置。
38.进一步,在一种较佳实施例中,位于气路槽上的多个气体腔室4均倾斜设置。
39.以上仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围。
40.本发明在上述基础上还具有如下实施方式:
41.本发明的进一步实施例中,本技术提出一种多自由度高灵活性的气动软体执行器,特别是在单个软体执行器上能够分别实现弯曲和不同幅度的缠绕功能,主要由限制层1、变形层2、气体通路3、气体腔室4、气体腔室外壁沟壑5组成。本发明涉及的一种多自由度
弯曲缠绕软体执行器具有两侧对称布置且分隔的气体腔室4结构,每侧均由具有一定倾斜角度的腔室阵列排布组成,每侧的所有腔室由一个气体通路3连通。本发明可以分别实现两个方向的缠绕和单纯的向内弯曲动作,通过对软体执行器两侧腔室的气压进行控制,单侧施压可以实现缠绕动作,两侧施加相同大小的气压可以实现弯曲动作,两侧施加不同的气压可以实现不同幅度的缠绕动作,具有高度灵活性和自适应性,制作简单成本低,可以适用于软体机器人的末端执行器中,实现所需的复杂工作。
42.本发明的进一步实施例中,位于变形层2上的两个气路槽对称设置,每一个气路槽的多个气体腔室4阵列设置,任意相邻的两个气体腔室4根据使用时的用途在生产过程中进行调整,对于弯曲程度价高的位置,比如变形层2的中部用于抓取的位置,相邻的气体腔室4之间的间距较大,可以实现较高的弯折程度,变形层2的端部,相邻的气体腔室4之间的间距较小,弯折程度较小,便于对准抓取位置。
43.本发明的进一步实施例中,气体腔室外壁沟壑5的宽度根据两侧的两个气体腔室4的间距进行调整,两个气体腔室4的间距越大,气体腔室外壁沟壑5的宽度越大。
44.本发明的进一步实施例中,位于变形层2上每一个气体腔室4的组成气体腔室外壁沟壑5的外壁为主要变形区域,每一个气体腔室4位于气体腔室外壁沟壑5处的外壁较薄,易变形,对气体腔室4通入气体后,气体腔室4位于气体腔室外壁沟壑5处的外壁向气体腔室外壁沟壑5处发生膨胀变形,变形后,气体腔室外壁沟壑5的两侧外壁相互挤压,使变形层2发生弯曲,通过调节对气体腔室4通入气体的量,即调节气体腔室4内的气压大小后,可以调节变形层2的弯曲程度。
45.本发明的进一步实施例中,位于变形层2上的多个气体腔室4均倾斜设置,对气体腔室4通入气体后,因为气体腔室4具有如图所示的倾斜角度,变形层2可以进行螺旋式的缠绕,变形层2缠绕后任意相邻两圈的间距通过改变倾斜角度进行调节,倾斜角度越大,任意相邻两圈的间距越小,倾斜角度为0度至90度。
46.本发明的进一步实施例中,每一个气路槽的多个气体腔室4通过一个气体通路3连通,通过气体通路3将气体和气压均匀运送到多个气体腔室4内,气体通路3和气体导管6连通,通过气体导管6对气路槽内通入气体。
47.本发明的进一步实施例中,气体通路3的宽度小于等于气体腔室4宽度,以便于发生变形。
48.本发明的进一步实施例中,限制层1包括:硅胶层和棉质纱网,硅胶层上粘贴有棉质纱网,通过硅胶层和变形层2连接可以实现柔性的密封连接,同时材料相同,柔韧性相同,避免出现密封性下降或者变形程度不一致的情况,同时在硅胶层内粘贴有棉质纱网,由于棉质纱网不具有延展性,同时具有较高的柔性,可以在保证变形层2的柔韧性不发生变形的情况下,限制硅胶层的延展性,使软体执行器通过变形层2变形并通过限制层1对物件进行抓取。
49.本发明的进一步实施例中,变形层2的端部设有两个气体导管6,通过调节气体导管6处的气压大小,可以调节变形层2的变形方向及变形角度,位于变形层2上的两个气路槽对称设置,如图4所示,当两个气体导管6的气压相同时,即同时通入等量的气体,变形层2仅进行环形的变形抓取,不会向两侧发生螺旋形的偏转,位于变形层2上的多个气体腔室4均倾斜设置,如图5所示,图示中,位于下侧的气体导管6的气压为零,位于上侧的气体导管6的
气压不为零,当一个气体导管6的气压为零,即不通入气体,另一个气体导管6的气压不为零,即通入气体,变形层2会向不通入气体的一侧发生螺旋形的变形抓取;如图6所示,图示中,位于下侧的气体导管6的气压较小,位于上侧的气体导管6的气压较大,当一个气体导管6通入少量气体,另一个气体导管6通入大量气体,变形层2会向通入少量气体的一侧发生螺旋形的变形抓取,但是其变形量小于气体导管6不通入气体的变形量,即两个气体导管6均通入气体后,可以增强气动软体执行器通过限制层1抓取物体的抓取力,增强抓握程度,同时通过通入少量气体的气体导管6可以有效抑制气动软体执行器呈螺旋状的变形程度,即增大螺旋后的半径及减小任意相邻的两个螺旋的间距。
50.本发明的进一步实施例中,气体导管6可以设于气路槽的中部,通过变形层2由中部至两端的变形进行抓取。
51.本发明的进一步实施例中,两个气体导管6可以分别设于变形层2的两端的两个端部,也可以设于变形层2的同一端部,均可以实现上述的效果,但优选的,两个气体导管6设于变形层2的同一端部,方便操作控制两个气体导管6的气压大小,实现抓取功能。
52.以上仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。