一种基于复眼结构的大视场连续变倍显微系统及方法
一、技术领域
1.本发明涉及一种大视场连续变倍显微系统及方法,更具体地说,本发明涉及一种基于复眼结构的大视场连续变倍显微系统及方法。
二、
背景技术:
2.光学显微镜是人们探索微观世界的重要仪器,一般用来观察微米级或亚微米级尺度的生物或物质,广泛应用于医学观察、生物研究等领域。传统的光学显微镜由物镜和目镜组成,与人眼共同构成一个共轭成像系统。随着光电信息技术和集成电路工艺的发展,高像素密度的图像传感器出现,可以将其集成到显微镜中,代替人眼接收光学图像并转换为计算机可以直接处理和显示的电信号,称这种显微镜为数码显微镜。
3.现有的数码显微镜虽然得到了很大的发展和广泛的应用,但是仍存在两方面的问题。一方面,受空间带宽积限制,高倍率、高分辨率与大视场不可兼得,例如目前商用20倍放大率的数码显微镜,其视场一般在毫米量级以下,而通过移动标本、拼接图像来拓展视场则会严重降低实时性;另一方面,现有的商用显微镜一般无法实现连续变倍,成像元件均为固体透镜,主要靠转动物镜盘、更换物镜来实现变倍,可以实现的观察倍率是离散的。这大大限制了数码显微镜的应用场景,因此,亟待发明一种实时视场大、分辨率和放大倍率高、可以连续变倍的数码显微镜。
三、
技术实现要素:
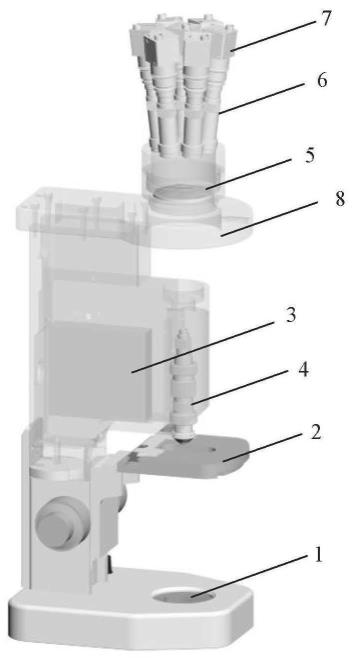
4.本发明提出一种基于复眼结构的大视场连续变倍显微系统及方法,此处复眼结构指含多个孔径、光轴非单一的光学结构。如附图1所示,该显微系统由照明光源、载物台、光学成像模块、液体透镜驱动模块和镜架构成。照明光源用于提供照明光;载物台用于承载样本;光学成像模块包含主物镜、分光透镜、子目镜阵列和图像传感器阵列,用于对样本进行大视场连续变倍显微成像和图像采集,其中主物镜由若干液体透镜和固体透镜构成,子目镜阵列中每个子目镜结构相同,由若干液体透镜和固体透镜构成;液体透镜驱动模块用于为主物镜和子目镜中的液体透镜提供驱动信号;镜架用于支撑和连接显微系统的各个部件。
5.本发明的基于复眼结构的大视场连续变倍显微成像方法如附图2所示:
6.首先,为主物镜和子目镜阵列中的液体透镜置入一组初始信号,主物镜和子目镜的光焦度及放大率实现初始化,待测样本经过主物镜一次放大后形成中继像,中继像光束经过分光透镜后分割为若干子视场光束,子视场光束进入对应的子目镜并聚焦于图像传感器之上形成显微图像。
7.然后,通过调控液体透镜的驱动信号,液体透镜光焦度发生变化,显微系统整体光焦度分配情况相应改变、放大倍率发生相应变化,在变倍过程中系统各组件结构参数和相对位置的数学关系以及成像倍率和视场变化的数学关系使得物像始终满足共轭条件、子视场之间始终存在交叠,通过实时采集图像传感器阵列的图像信号,并将图像进行校正和拼
接,即可获得不同放大倍率下的大视场显微图像。
8.在工作过程中,显微系统的前工作距和后工作距始终保持不变,各元件均不进行机械移动,显微系统的变倍功能完全依靠调控液体透镜来实现。
9.本发明的基于复眼结构的大视场连续变倍显微系统及方法中,各组件结构参数和相对位置的数学关系如下:
10.光学成像模块中的分光透镜的外表面由两圈子球表面构成,即中心子球表面和外圈子球表面,其正视图和侧视截面图分别如附图3(a)和3(b)所示。其中,外圈子球表面由若干曲率半径相同的子球表面构成,中心子球表面曲率半径为r1,外圈子球表面曲率半径为r2,外圈子球表面中心轴线与中心子球表面的中心轴线夹角为θ;分光透镜的内表面为一标准球面,曲率半径为r0。分光透镜的内表面曲率半径r0可近似表示为:
[0011][0012]
其中,h为外圈子球表面对应子目镜的中心光线与样本面的交点和中心子球表面对应子目镜的中心光线与样本面的交点间的距离,l为中继像与分光透镜的中心距离,β为主物镜放大倍率,x
p
为主物镜匹兹伐场曲。
[0013]
光学成像模块中的子目镜阵列所包含的子目镜个数和图像传感器阵列所包含的图像传感器个数均与分光透镜外表面的子球表面个数相同,子目镜阵列和图像传感器阵列的排布方式应与分光透镜子球表面相对应,即子目镜及所接图像传感器的中心轴线应与对应分光透镜子球表面的中心轴线完全重合。
[0014]
本发明的基于复眼结构的大视场连续变倍显微系统及方法中,倍率和视场变化的数学关系如下:
[0015]
低倍率工作光路如附图4所示,通过液体透镜驱动模块向主物镜和子目镜中的液体透镜发送驱动信号以使液体透镜调至对应光焦度,此时,主物镜、分光透镜中心子球表面对应透镜区域及相应的子目镜形成的物方线视场为a1、像方线视场为c1、放大倍率为c1/a1;主物镜、分光透镜单个外圈子球表面对应透镜区域及相应的子目镜形成的物方线视场为a2、像方线视场为c2、放大倍率为c2/a2。
[0016]
经拼接后整个显微系统总物方线视场为a,为使得物方视场连续,即子视场之间有重叠区域,需满足:
[0017]
c1/a1≈c2/a2=βa,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0018]
a1 2a2《a,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0019]
当大视场连续变倍显微系统调至高倍率工作模式时,如附图5所示,为主物镜或子目镜中的液体透镜置入新的一组驱动信号,液体透镜光焦度相应改变,此时,主物镜、分光透镜中心子球表面对应透镜区域及相应的子目镜形成的物方线视场为b1但像方线视场仍为c1,则放大倍率为c1/b1,主物镜、分光透镜单个外圈子球表面对应透镜区域及相应的子目镜形成的物方线视场为b2但像方线视场仍为c2,则放大倍率为c2/b2,经拼接后整个显微系统可以得到的总物方线视场为b,应满足:
[0020]
c1/b1≈c2/b2=βb,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0021]
b1 2b2《b、b1《a1、b2《a2,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0022]
该状态下显微系统的整体放大倍率提升为原先的βb/βa倍,即基于本发明中的显微
系统及方法,调整液体透镜光焦度可实现显微倍率连续改变。
[0023]
本发明的结构相对于单孔径成像系统有更大的像差校正自由度,因此有很强的视场和分辨率拓展性,可以兼顾实现大视场和高时空分辨率;此外,本发明采用液体透镜承担调焦功能,打破传统的镜片机械移动式变焦方法,因此该大视场连续变倍显微系统可以实现更加快速、稳定的连续变倍,为观察样本全貌和进行细节追踪提供了便利。
[0024]
值得注意的是:增加分光透镜子球表面圈数以及相应的子目镜、图像传感器圈数,或改变分光透镜某圈子球表面个数以及相应的子目镜、图像传感器个数,其本质与本发明相同,也属于本发明专利的保护范围。
[0025]
优选地,液体透镜通过外驱动改变界面曲率以实现光焦度变化,液体透镜类型可以是电润湿驱动的液体透镜、机械马达驱动的弹性薄膜液体透镜、介电泳力驱动的液体透镜和磁控液体透镜等。
[0026]
优选地,主物镜中的液体透镜个数m1和固体透镜个数n1须满足m1 n1≥1,每个子目镜中的液体透镜个数m2和固体透镜个数n2须满足m2 n2≥1,同时应保证m1 m2≥2。
四、附图说明
[0027]
附图1为本发明的系统结构示意图。
[0028]
附图2为本发明的大视场连续变倍显微成像方法示意图。
[0029]
附图3(a)为本发明中分光透镜的正视图。
[0030]
附图3(b)为本发明中分光透镜的侧视截面图。
[0031]
附图4为本发明的低倍率工作光路示意图。
[0032]
附图5为本发明的高倍率工作光路示意图。
[0033]
附图6为本发明具体实施例中放大倍率为10倍时的光路仿真图。
[0034]
附图7为本发明具体实施例中放大倍率为20倍时的光路仿真图。
[0035]
上述各附图中的图示标号为:
[0036]
(1)照明光源、(2)载物台、(3)液体透镜驱动模块、(4)主物镜、(5)分光透镜、(6)子目镜、(7)图像传感器、(8)镜架、(9)液体透镜、(10)固体透镜、(11)子目镜阵列、(12)图像传感器阵列、(13)第一液体透镜、(14)第二液体透镜、(15)第三液体透镜、(16)第四液体透镜。
[0037]
应该理解上述附图只是示意性的,并没有完全按比例绘制。
五、具体实施方式
[0038]
下面详细说明本发明提出的一种基于复眼结构的大视场连续变倍显微系统及方法的实施例,对本发明进行进一步的描述。有必要在此指出的是,以下实施例只用于本发明做进一步的说明,不能理解为对本发明保护范围的限制,该领域技术熟练人员根据上述发明内容对本发明做出一些非本质的改进和调整,仍属于本发明的保护范围。
[0039]
本实施例中的一种基于复眼结构的大视场连续变倍显微系统包括照明光源、载物台、主物镜、分光透镜、子目镜阵列和图像传感器阵列、液体透镜驱动模块和镜架。其中,主物镜由1片双凹固体透镜、2片双凸固体透镜、1片平凸固体透镜、1片弯月固体透镜、1片双胶合固体透镜和4片通光孔径3.9mm的电润湿驱动液体透镜构成,4片电润湿驱动液体透镜从待测样本方向到像面方向依次称为第一液体透镜、第二液体透镜、第三液体透镜、第四液体
透镜;子目镜阵列包含7个子目镜,每个子目镜都由1片弯月固体透镜和1片双胶合固体透镜构成;图像传感器阵列包含7个对角线为1英寸的cmos工业相机;分光透镜外表面的中心子球表面曲率半径r1和外圈子球表面曲率半径r2均为-31.037mm,分光透镜内表面曲率半径r0为-160mm,中心子球表面和外圈子球表面的中心轴线夹角θ为6.6
°
。液体透镜驱动模块有4个供电通道,为液体透镜提供交流电压驱动信号,电压调控精度为0.2v。
[0040]
在放大倍率初始化时,液体透镜驱动模块为主物镜中的4片电润湿驱动液体透镜提供交流电压,使得第一液体透镜的界面曲率r1为5.33mm、第二液体透镜的界面曲率r2为5.357mm、第三液体透镜的界面曲率r3为-205.331mm、第四液体透镜的界面曲率r4为-7.356mm,如附图6所示。此时,主物镜、分光透镜中心子球表面对应透镜区域及相应的子目镜形成的物方线视场a1为0.89mm,主物镜、分光透镜单个外圈子球表面对应透镜区域及相应的子目镜形成的物方线视场a2为0.98mm。对7个图像传感器采集的图像进行校正和拼接处理,总体物方线视场a可以达到2.8mm,放大倍率为10倍,分辨率可达3微米。
[0041]
切换到高工作倍率时,液体透镜驱动模块为主物镜中的4片电润湿驱动液体透镜提供新的一组交流电压,使得第一液体透镜的界面曲率r1为-8.832mm、第二液体透镜的界面曲率r2为-7.394mmmm、第三液体透镜的界面曲率r3为5.813mmmm、第四液体透镜的界面曲率r4为5.38mm,如附图7所示。此时,主物镜、分光透镜中心子球表面对应透镜区域及相应的子目镜形成的物方线视场b1为0.47mm,主物镜、分光透镜单个外圈子球表面对应透镜区域及相应的子目镜形成的物方线视场b2为0.53mm。对7个图像传感器采集的图像进行校正和拼接处理,总体物方线视场b可以达到1.5mm,放大倍率20倍,分辨率可达1.7微米。
[0042]
由于通过调节驱动电压可以使得所用液体透镜界面曲率半径在(-∞,-7.3mm)∪(5.3mm,∞)区间内基本能够连续变化,响应时间在100毫秒以内,因此该显微系统的倍率可以在10-20倍之间快速变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。